
下肢康复助行方法.pdf

小宏****aa

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
下肢康复助行方法.pdf
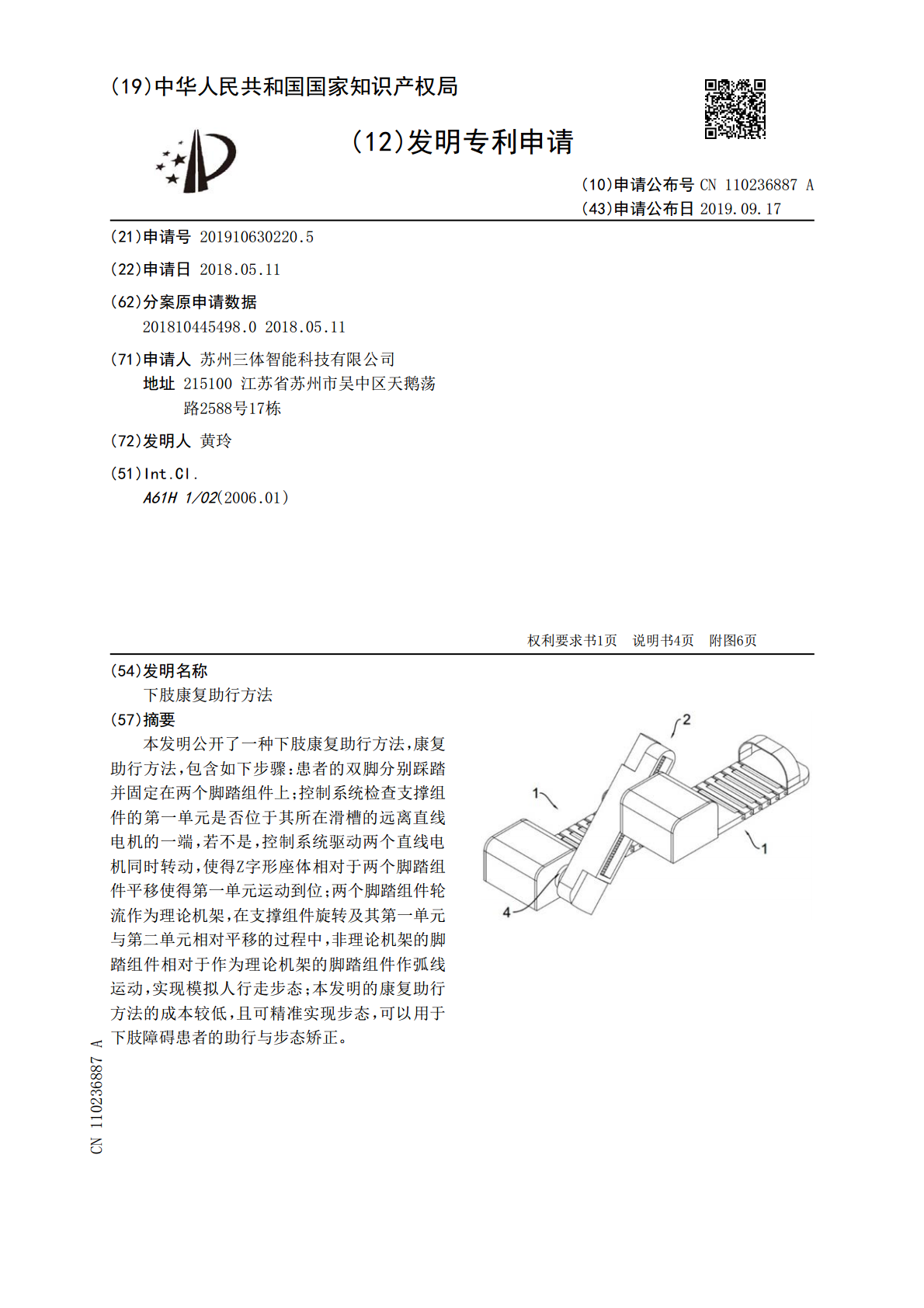
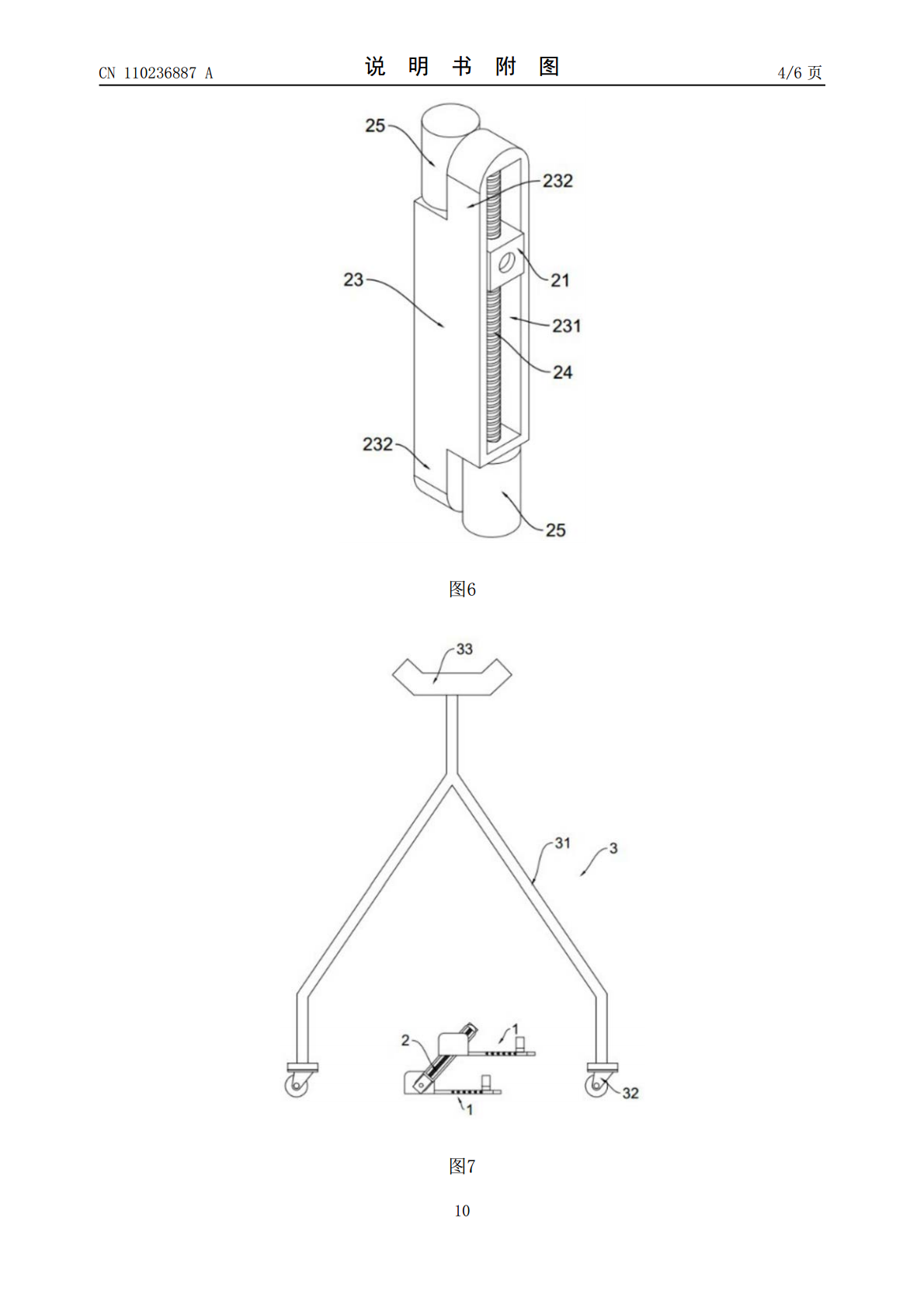
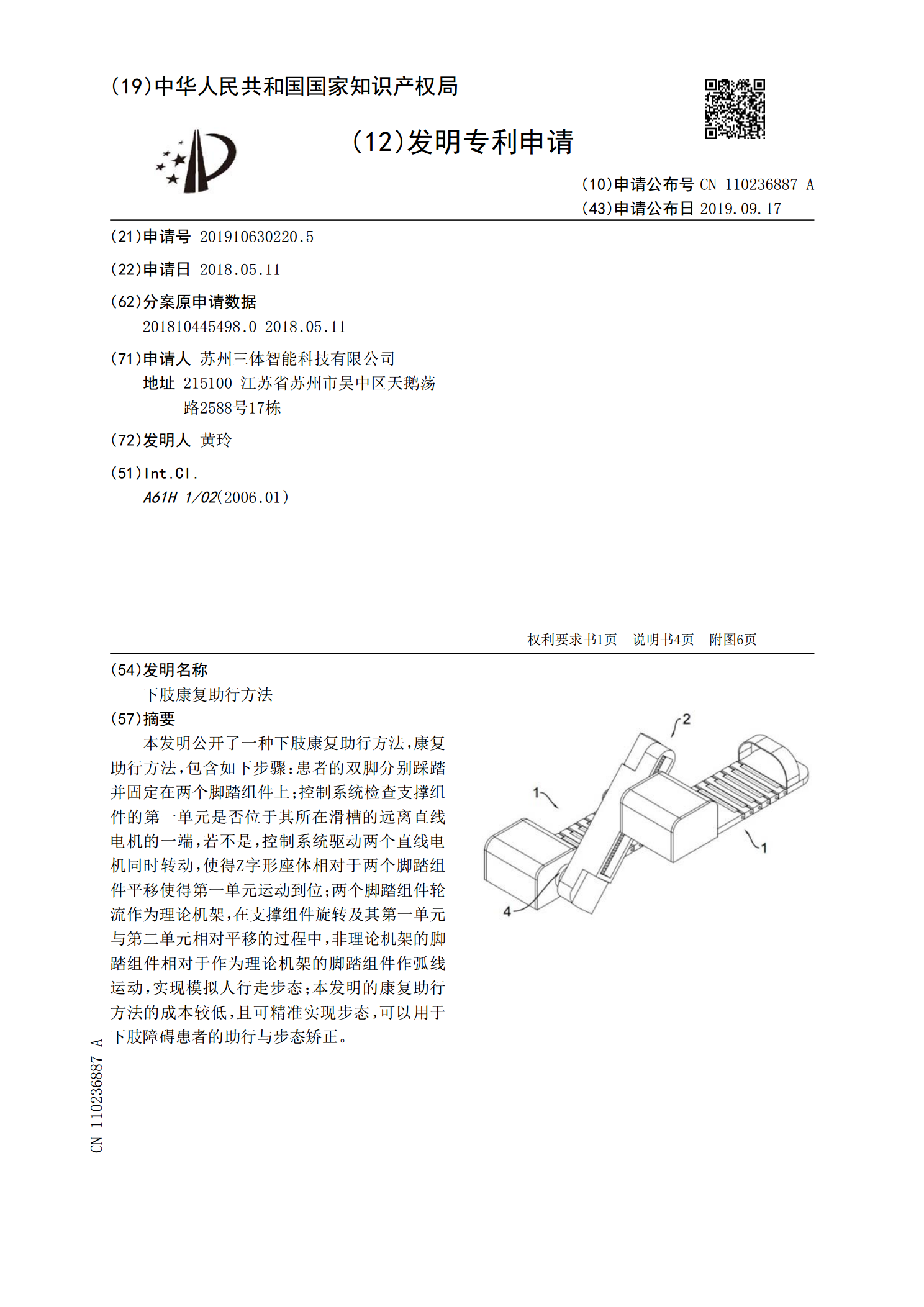
本发明公开了一种下肢康复助行方法,康复助行方法,包含如下步骤:患者的双脚分别踩踏并固定在两个脚踏组件上;控制系统检查支撑组件的第一单元是否位于其所在滑槽的远离直线电机的一端,若不是,控制系统驱动两个直线电机同时转动,使得Z字形座体相对于两个脚踏组件平移使得第一单元运动到位;两个脚踏组件轮流作为理论机架,在支撑组件旋转及其第一单元与第二单元相对平移的过程中,非理论机架的脚踏组件相对于作为理论机架的脚踏组件作弧线运动,实现模拟人行走步态;本发明的康复助行方法的成本较低,且可精准实现步态,可以用于下肢障碍患者的
下肢康复助行器及其康复助行方法.pdf
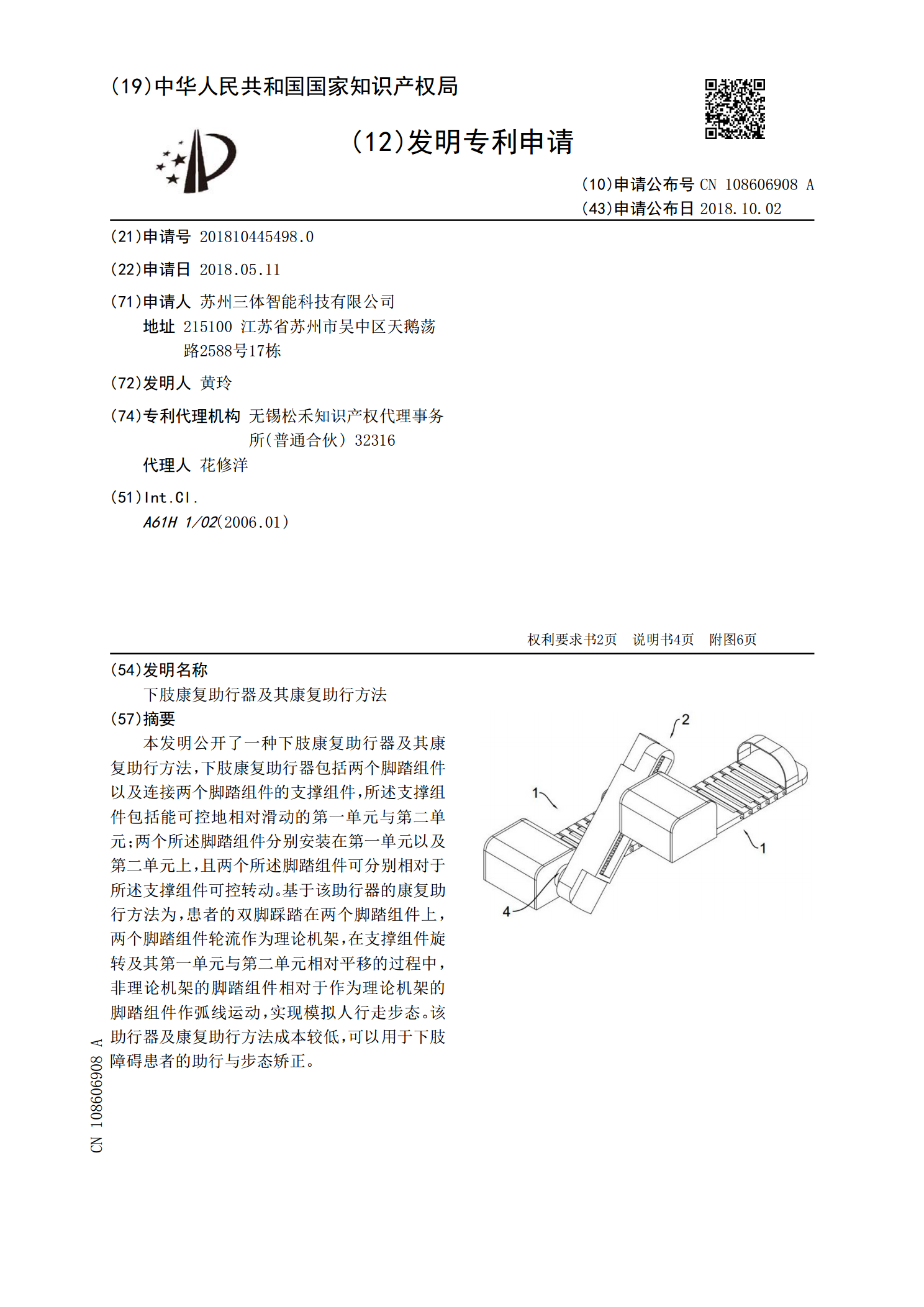
本发明公开了一种下肢康复助行器及其康复助行方法,下肢康复助行器包括两个脚踏组件以及连接两个脚踏组件的支撑组件,所述支撑组件包括能可控地相对滑动的第一单元与第二单元;两个所述脚踏组件分别安装在第一单元以及第二单元上,且两个所述脚踏组件可分别相对于所述支撑组件可控转动。基于该助行器的康复助行方法为,患者的双脚踩踏在两个脚踏组件上,两个脚踏组件轮流作为理论机架,在支撑组件旋转及其第一单元与第二单元相对平移的过程中,非理论机架的脚踏组件相对于作为理论机架的脚踏组件作弧线运动,实现模拟人行走步态。该助行器及康复助行
可穿戴下肢康复助行机械装置.pdf
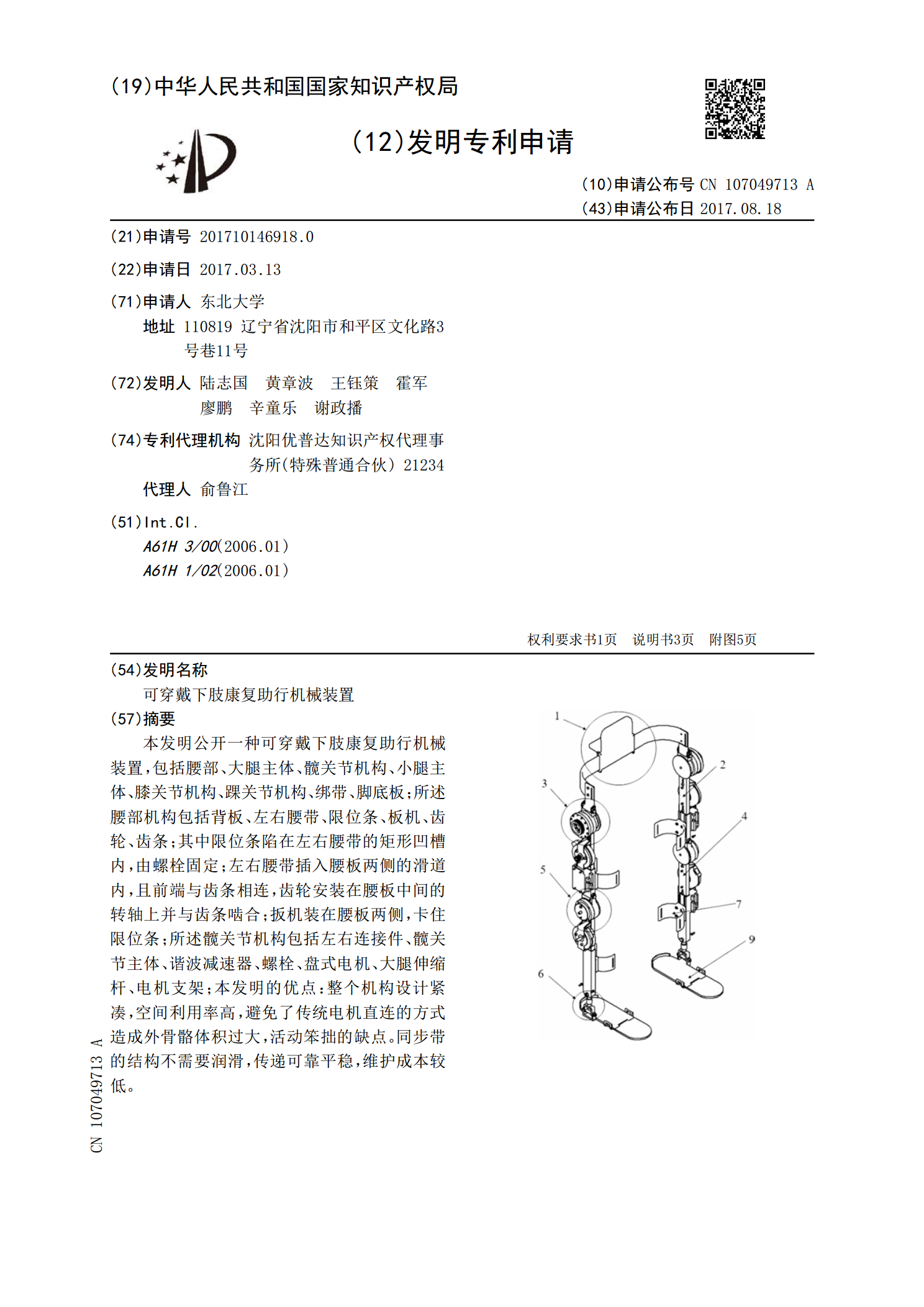
本发明公开一种可穿戴下肢康复助行机械装置,包括腰部、大腿主体、髋关节机构、小腿主体、膝关节机构、踝关节机构、绑带、脚底板;所述腰部机构包括背板、左右腰带、限位条、板机、齿轮、齿条;其中限位条陷在左右腰带的矩形凹槽内,由螺栓固定;左右腰带插入腰板两侧的滑道内,且前端与齿条相连,齿轮安装在腰板中间的转轴上并与齿条啮合;扳机装在腰板两侧,卡住限位条;所述髋关节机构包括左右连接件、髋关节主体、谐波减速器、螺栓、盘式电机、大腿伸缩杆、电机支架;本发明的优点:整个机构设计紧凑,空间利用率高,避免了传统电机直连的方式造
一种可穿戴下肢康复助行器.pdf
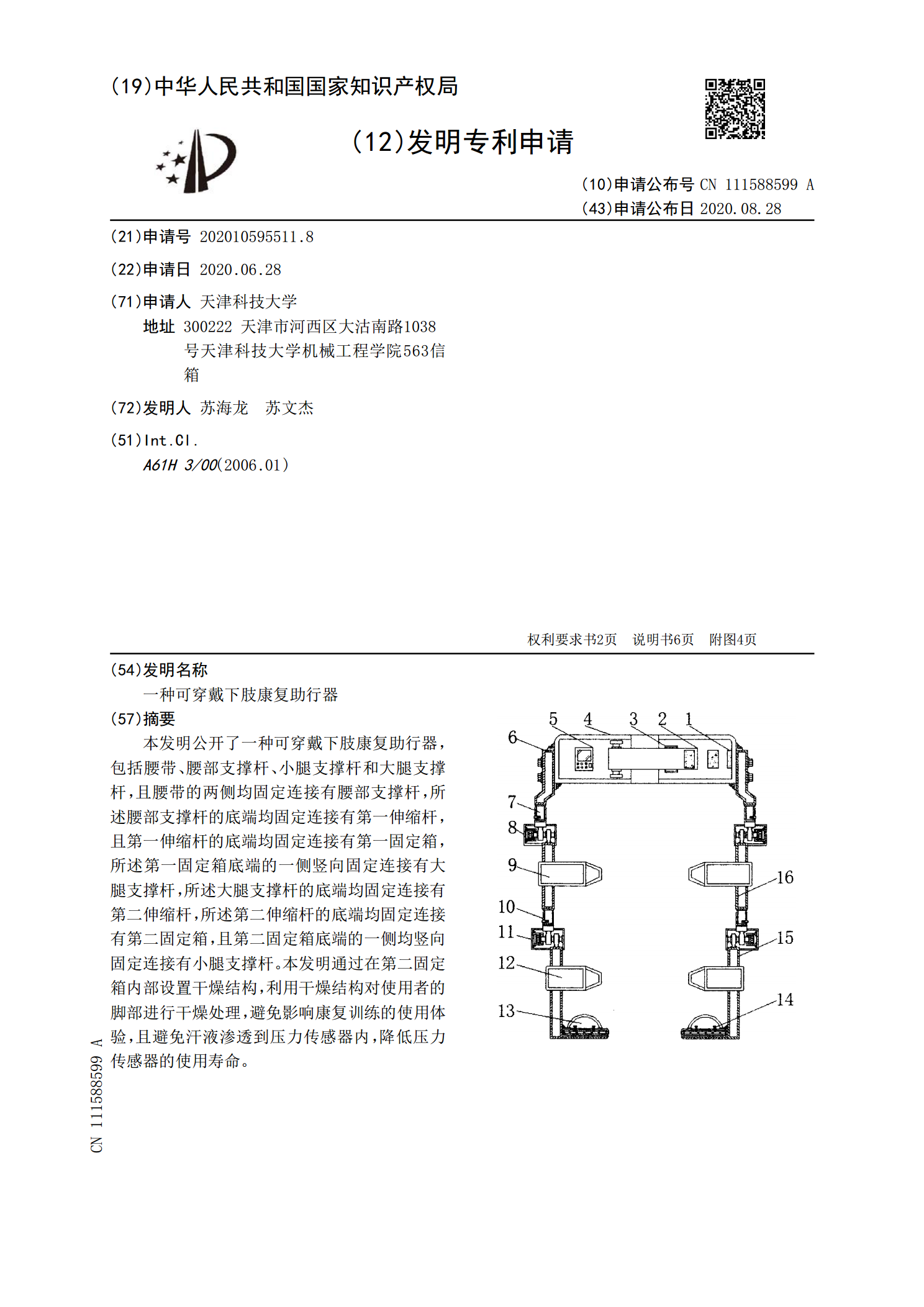
本发明公开了一种可穿戴下肢康复助行器,包括腰带、腰部支撑杆、小腿支撑杆和大腿支撑杆,且腰带的两侧均固定连接有腰部支撑杆,所述腰部支撑杆的底端均固定连接有第一伸缩杆,且第一伸缩杆的底端均固定连接有第一固定箱,所述第一固定箱底端的一侧竖向固定连接有大腿支撑杆,所述大腿支撑杆的底端均固定连接有第二伸缩杆,所述第二伸缩杆的底端均固定连接有第二固定箱,且第二固定箱底端的一侧均竖向固定连接有小腿支撑杆。本发明通过在第二固定箱内部设置干燥结构,利用干燥结构对使用者的脚部进行干燥处理,避免影响康复训练的使用体验,且避免汗
一种用于下肢康复训练的助行器.pdf
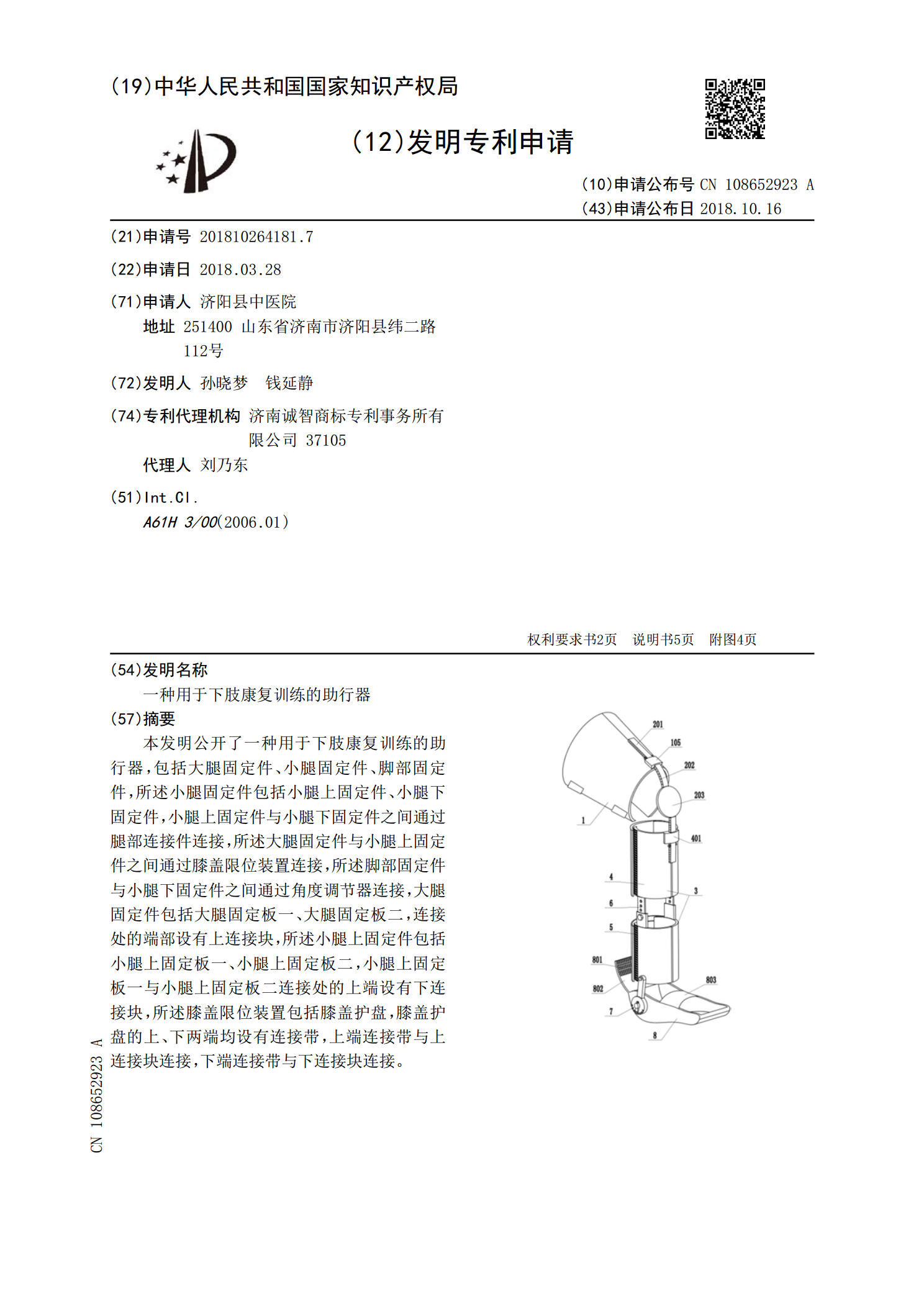
本发明公开了一种用于下肢康复训练的助行器,包括大腿固定件、小腿固定件、脚部固定件,所述小腿固定件包括小腿上固定件、小腿下固定件,小腿上固定件与小腿下固定件之间通过腿部连接件连接,所述大腿固定件与小腿上固定件之间通过膝盖限位装置连接,所述脚部固定件与小腿下固定件之间通过角度调节器连接,大腿固定件包括大腿固定板一、大腿固定板二,连接处的端部设有上连接块,所述小腿上固定件包括小腿上固定板一、小腿上固定板二,小腿上固定板一与小腿上固定板二连接处的上端设有下连接块,所述膝盖限位装置包括膝盖护盘,膝盖护盘的上、下两端