
一种扩张式输电线路巡检机器人.pdf

努力****采萍

1/10

2/10

3/10
4/10

5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种输电线路巡检机器人.pdf
本发明公开了一种输电线路巡检机器人,在以X、Y、Z轴为坐标轴的空间直角坐标系中,所述输电线路巡检机器人包括:主动轮机构(10)、从动轮机构(20)、主控制机构(30)、连接臂(40)和自适应调节机构(50),从动轮机构(20)含有主动轮(12),从动轮机构(20)含有两个从动轮(22),主动轮(12)与两个从动轮(22)能够夹紧地线(60);自适应调节机构(50),能够使从动轮机构(20)沿Z轴方向移动。该输电线路巡检机器人设计结构简单,易于维护,解决了巡检人员的不灵活性和人为因素造成的漏检等诸多问题。

用于输电线路巡检机器人的动力臂和输电线路巡检机器人.pdf
本发明属于机器人技术领域,具体涉及一种用于输电线路巡检机器人的动力臂和输电线路巡检机器人,旨在解决现有技术中巡检机器人越障动作复杂、越障效率低的问题。本发明提供一种输电线路巡检机器人包括至少两个动力臂,所述动力臂包括抱线模块和巡线模块;所述巡线模块包括依次连接的弹性压紧机构、爬行轮和叶轮机构,所述爬行轮与所述叶轮机构相互独立,所述爬行轮用于在输电线路上行走,遇到障碍物时,所述叶轮机构与所述弹性压紧机构构成被动柔顺式越障装置,分别实现支撑所述爬行轮位于输电线上方和所述爬行轮不脱离障碍物表面的功能,相互配合完
一种架空输电线路的巡检机器人.pdf
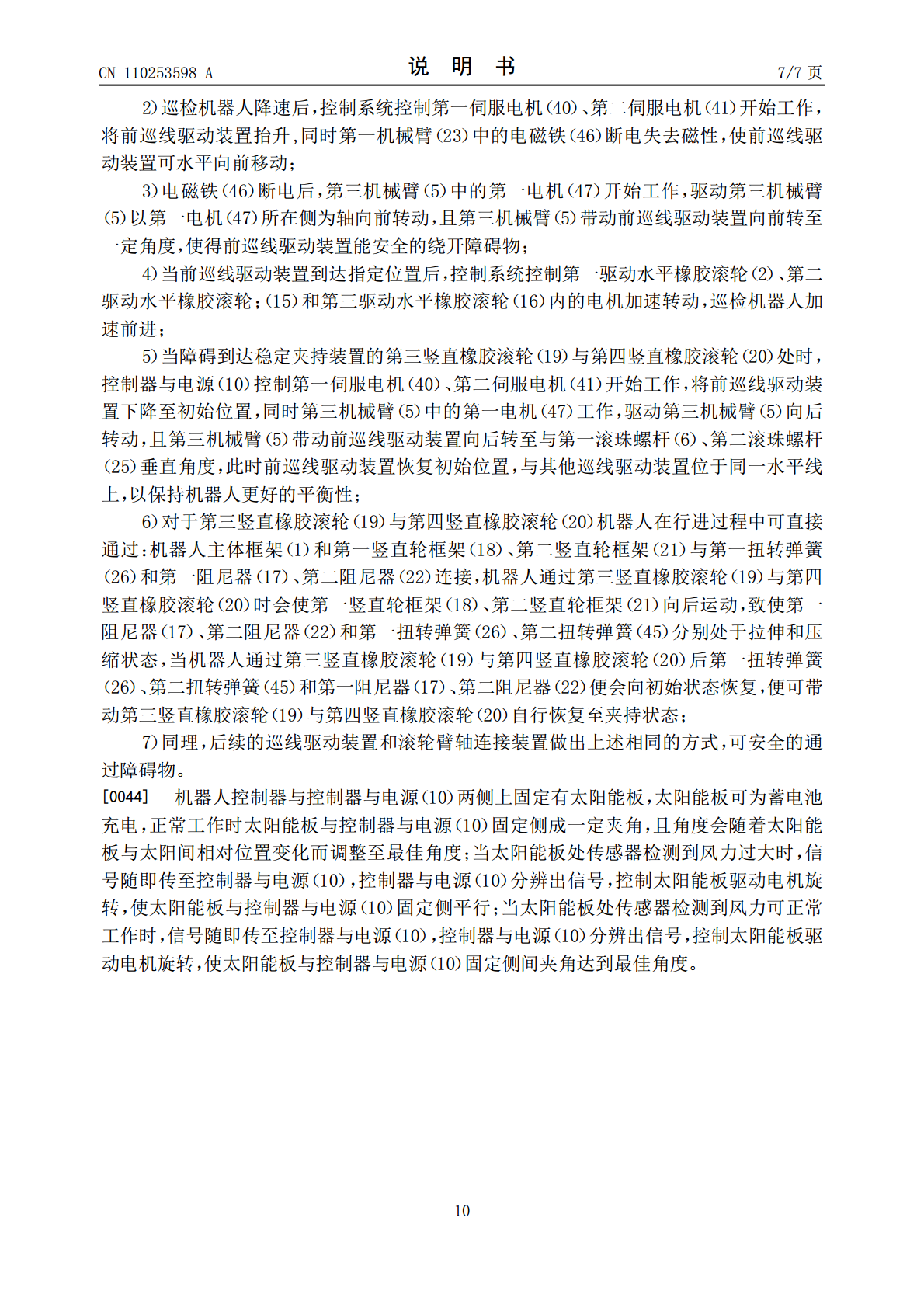
本发明公开了一种架空输电线路的巡检机器人,包括:机体,所述机体的顶部安装有固定板,固定板的顶部两侧靠近边缘处分别安装有行走机构,固定板的顶面中部安装有越障机构,行走机构和越障机构的结构相同,且行走机构包括行走轮、连接板、支撑柱、限位管、固定座和电动推杆一。本发明巡检机器人在架空线路上移动的时候根据设定的顺序来反复伸出和收回行走机构和越障机构,来达到越障的效果,越障的时候机器人不会因为晃动而从输电线上掉下,保证了机器人的安全工作;巡检机器人可根据线路的倾斜度来调整行走机构的长度,从而调整机体的倾斜角度,达到

输电线路智能巡检机器人.pdf
本发明提供一种输电线路智能巡检机器人,包括:控制箱体、摄像头、曲臂和行走装置;摄像头设置在控制箱体的底部,用于采集输电线路的图像;曲臂的一端与控制箱体固定连接,另一端与行走装置连接;行走装置中,第一行走轮和第二行走轮设置在驱动轮轴上,第一行走轮用于在输电线路上行走;第二行走轮分别设置在第一行走轮的两侧,用于在设置于输电线路上的避障桥上行走;驱动电机与驱动轮轴连接,通过驱动轮轴带动第一行走轮和第二行走轮转动。控制箱体内设置有中央控制模块,中央控制模块用于控制行走装置和摄像头。本发明实现了巡检机器人在输电线路
一种扩张式输电线路巡检机器人.pdf
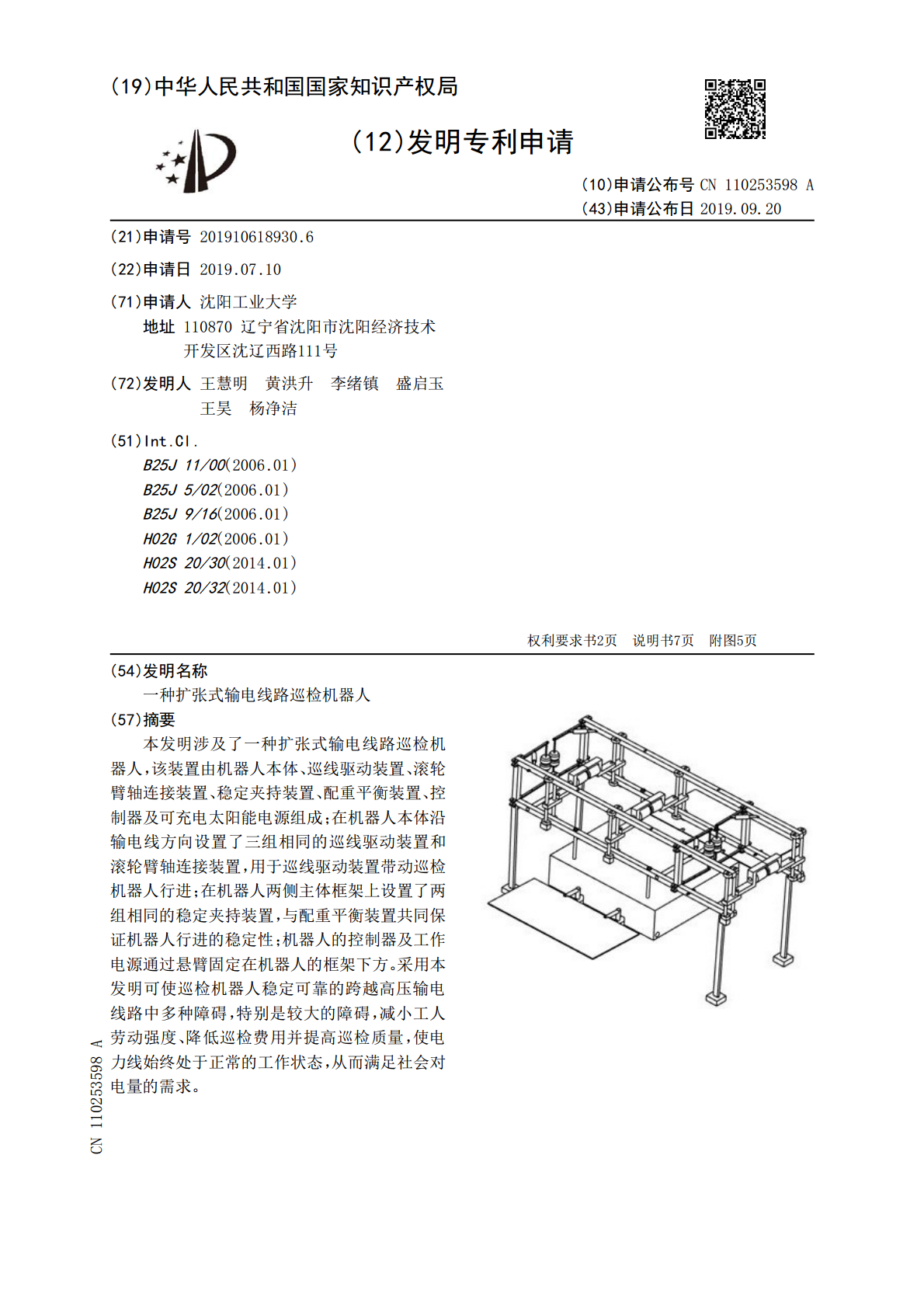
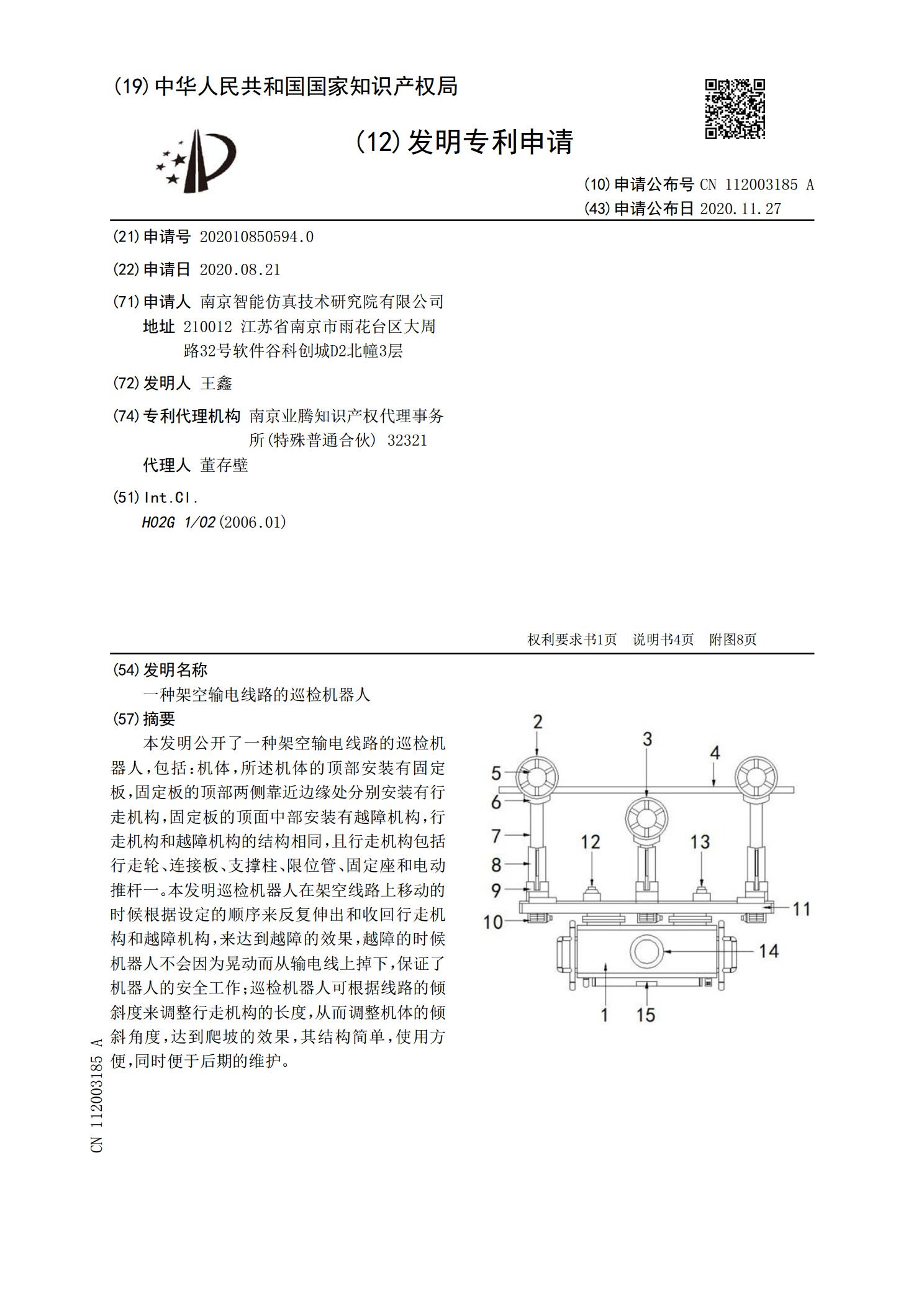
本发明涉及了一种扩张式输电线路巡检机器人,该装置由机器人本体、巡线驱动装置、滚轮臂轴连接装置、稳定夹持装置、配重平衡装置、控制器及可充电太阳能电源组成;在机器人本体沿输电线方向设置了三组相同的巡线驱动装置和滚轮臂轴连接装置,用于巡线驱动装置带动巡检机器人行进;在机器人两侧主体框架上设置了两组相同的稳定夹持装置,与配重平衡装置共同保证机器人行进的稳定性;机器人的控制器及工作电源通过悬臂固定在机器人的框架下方。采用本发明可使巡检机器人稳定可靠的跨越高压输电线路中多种障碍,特别是较大的障碍,减小工人劳动强度、降