
一种用于工业机器人的货物抓取装置.pdf

长春****主a


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种用于工业机器人的货物抓取装置及抓取系统.pdf
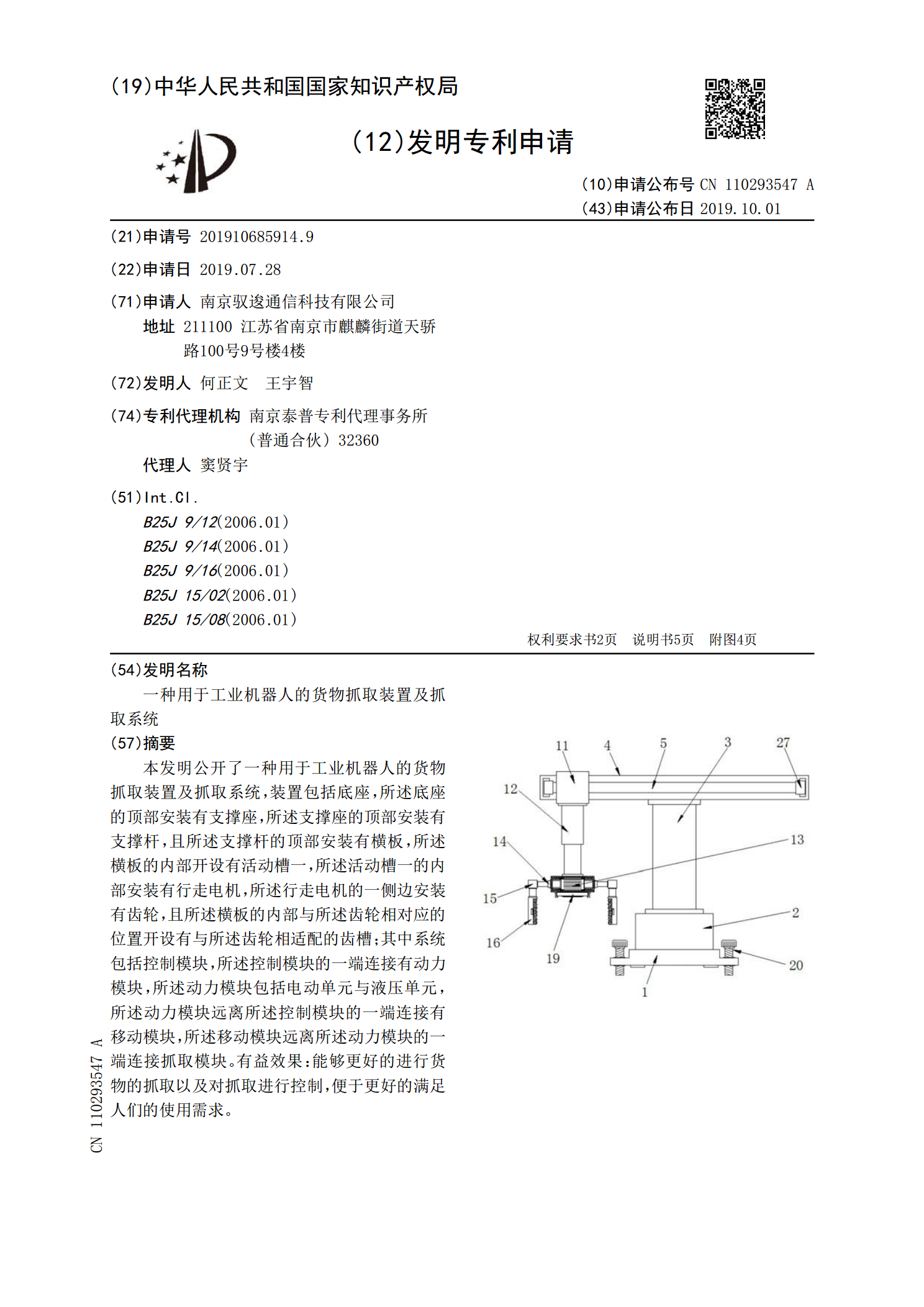
本发明公开了一种用于工业机器人的货物抓取装置及抓取系统,装置包括底座,所述底座的顶部安装有支撑座,所述支撑座的顶部安装有支撑杆,且所述支撑杆的顶部安装有横板,所述横板的内部开设有活动槽一,所述活动槽一的内部安装有行走电机,所述行走电机的一侧边安装有齿轮,且所述横板的内部与所述齿轮相对应的位置开设有与所述齿轮相适配的齿槽;其中系统包括控制模块,所述控制模块的一端连接有动力模块,所述动力模块包括电动单元与液压单元,所述动力模块远离所述控制模块的一端连接有移动模块,所述移动模块远离所述动力模块的一端连接抓取模块
一种用于工业机器人的货物抓取装置.pdf
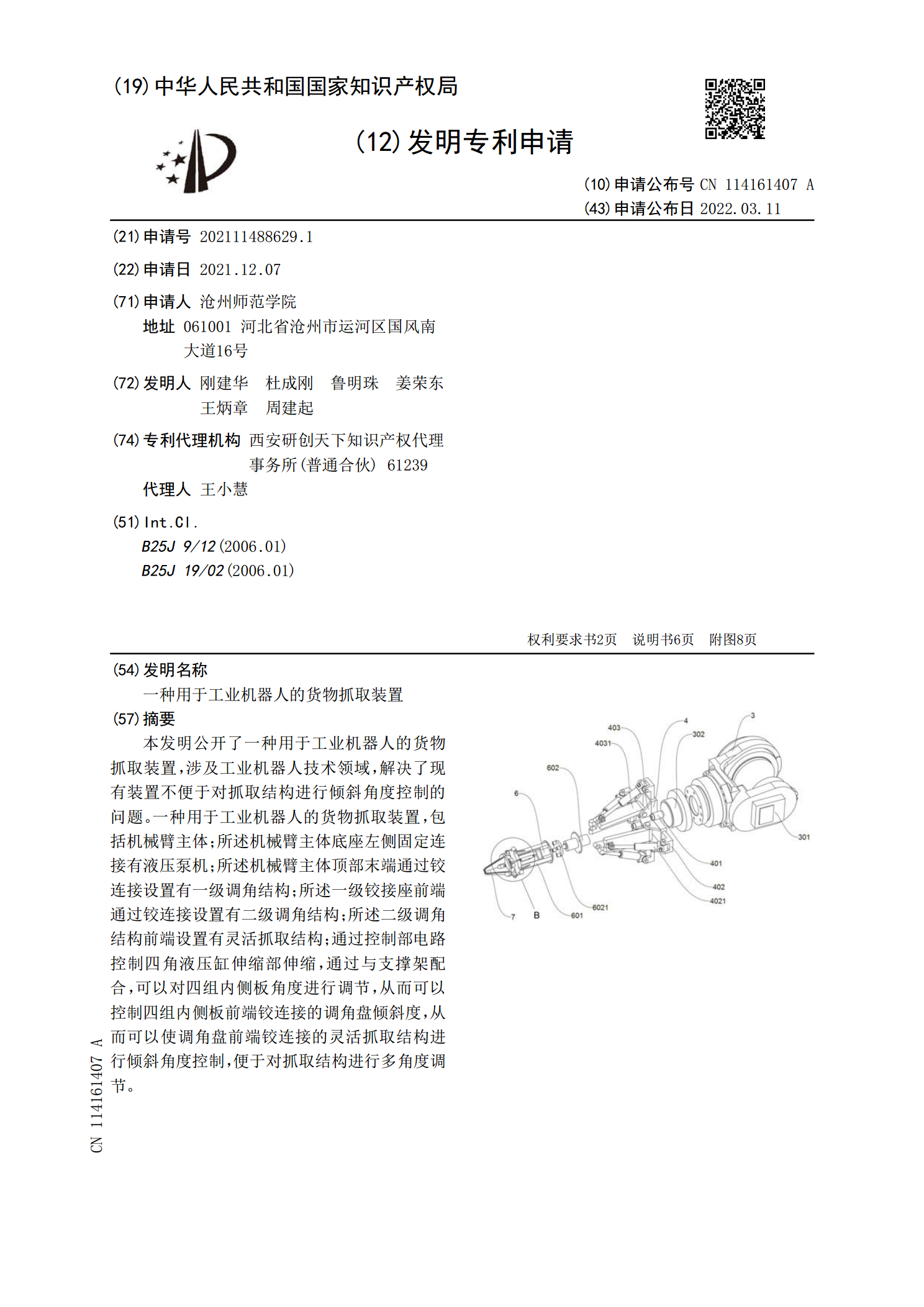
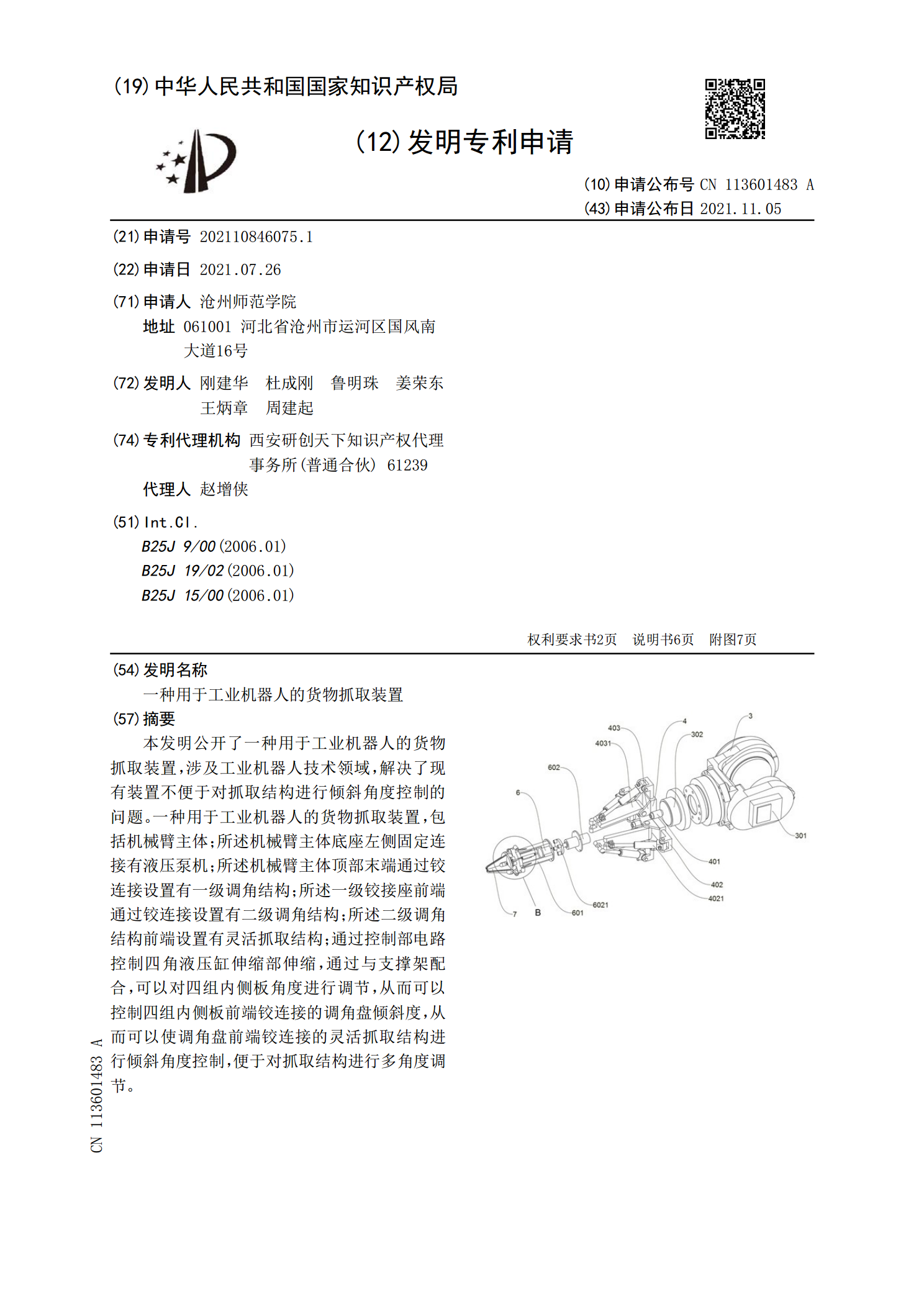
本发明公开了一种用于工业机器人的货物抓取装置,涉及工业机器人技术领域,解决了现有装置不便于对抓取结构进行倾斜角度控制的问题。一种用于工业机器人的货物抓取装置,包括机械臂主体;所述机械臂主体底座左侧固定连接有液压泵机;所述机械臂主体顶部末端通过铰连接设置有一级调角结构;所述一级铰接座前端通过铰连接设置有二级调角结构;所述二级调角结构前端设置有灵活抓取结构;通过控制部电路控制四角液压缸伸缩部伸缩,通过与支撑架配合,可以对四组内侧板角度进行调节,从而可以控制四组内侧板前端铰连接的调角盘倾斜度,从而可以使调角盘前
一种用于工业机器人的货物抓取装置.pdf
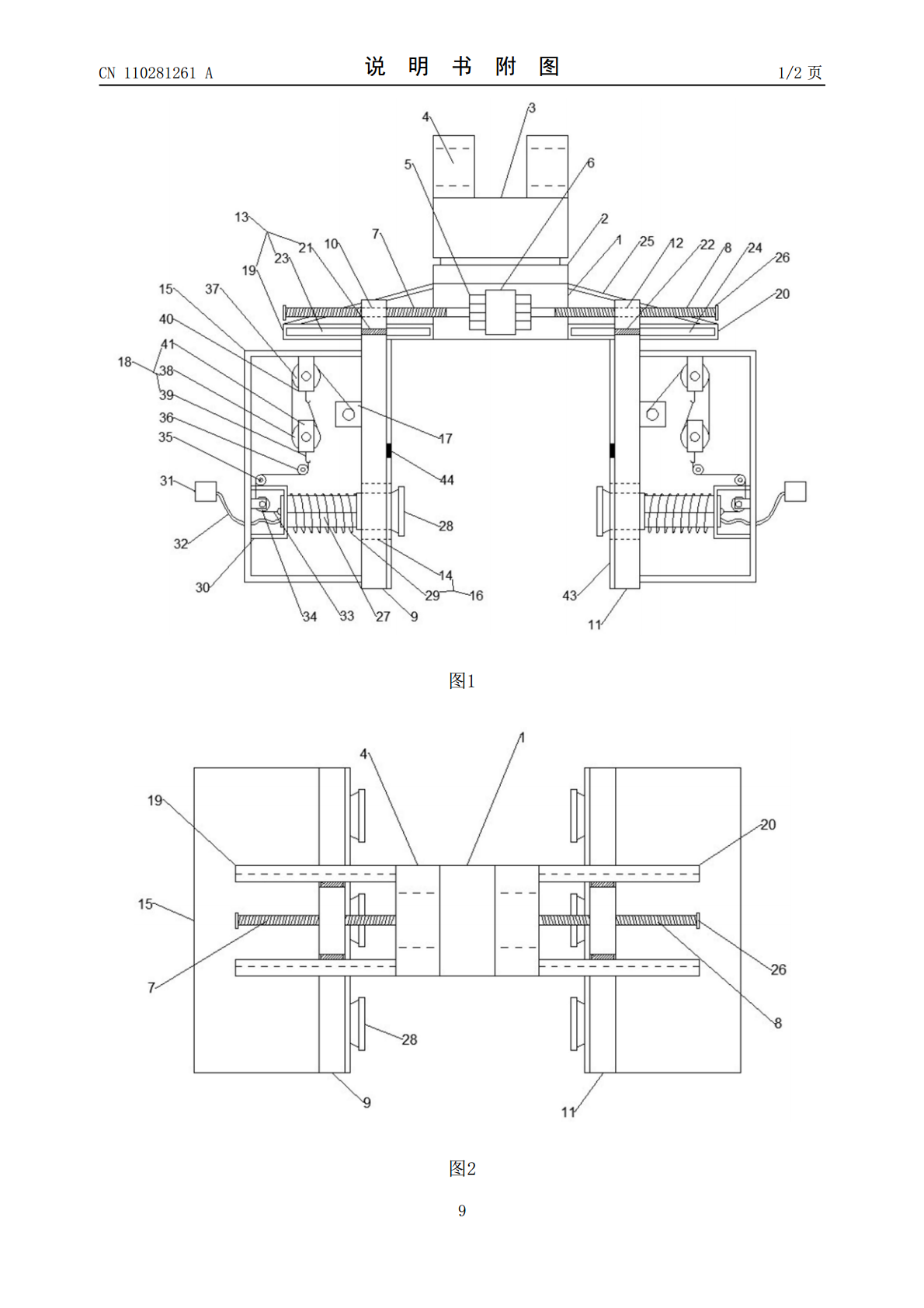
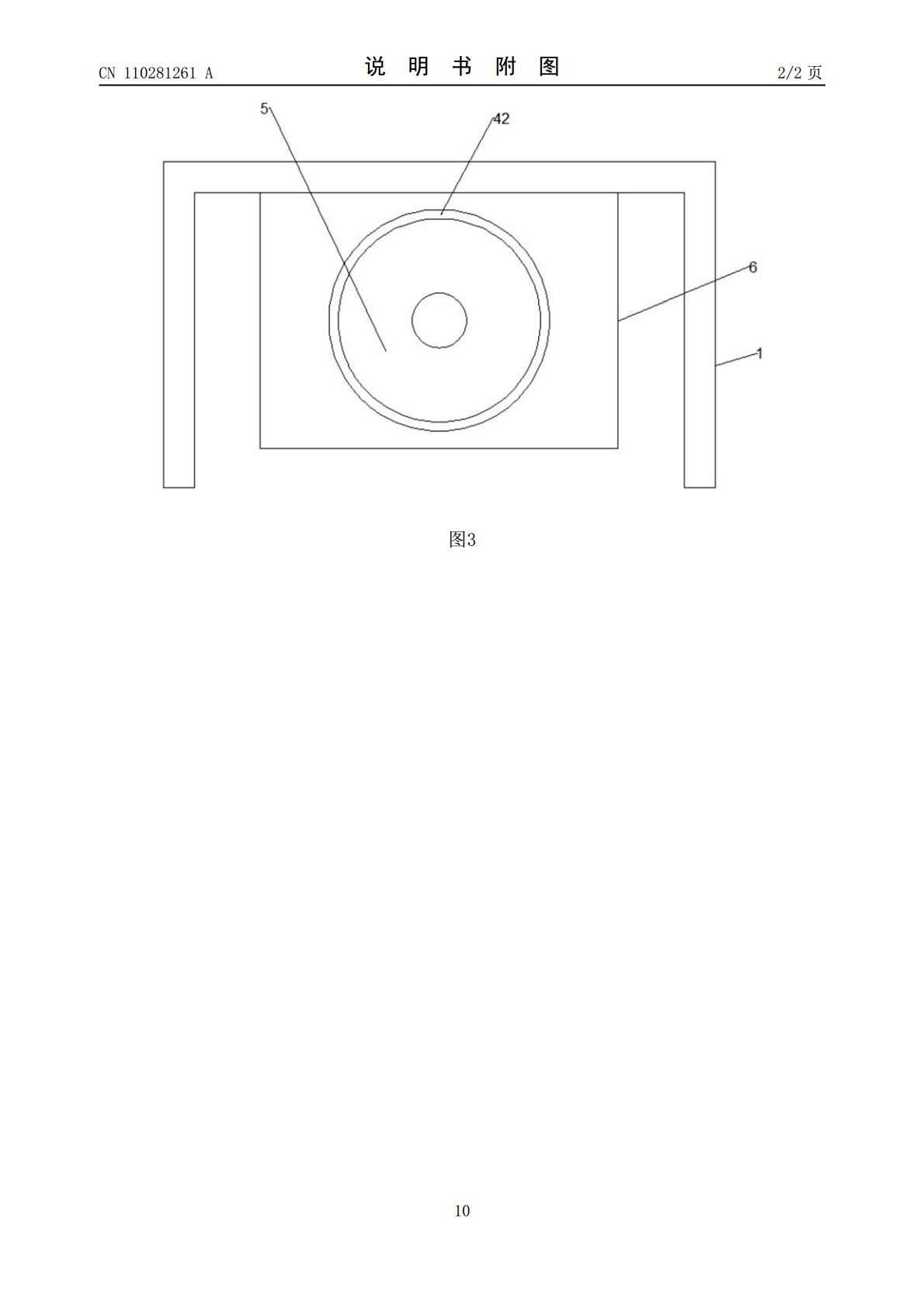
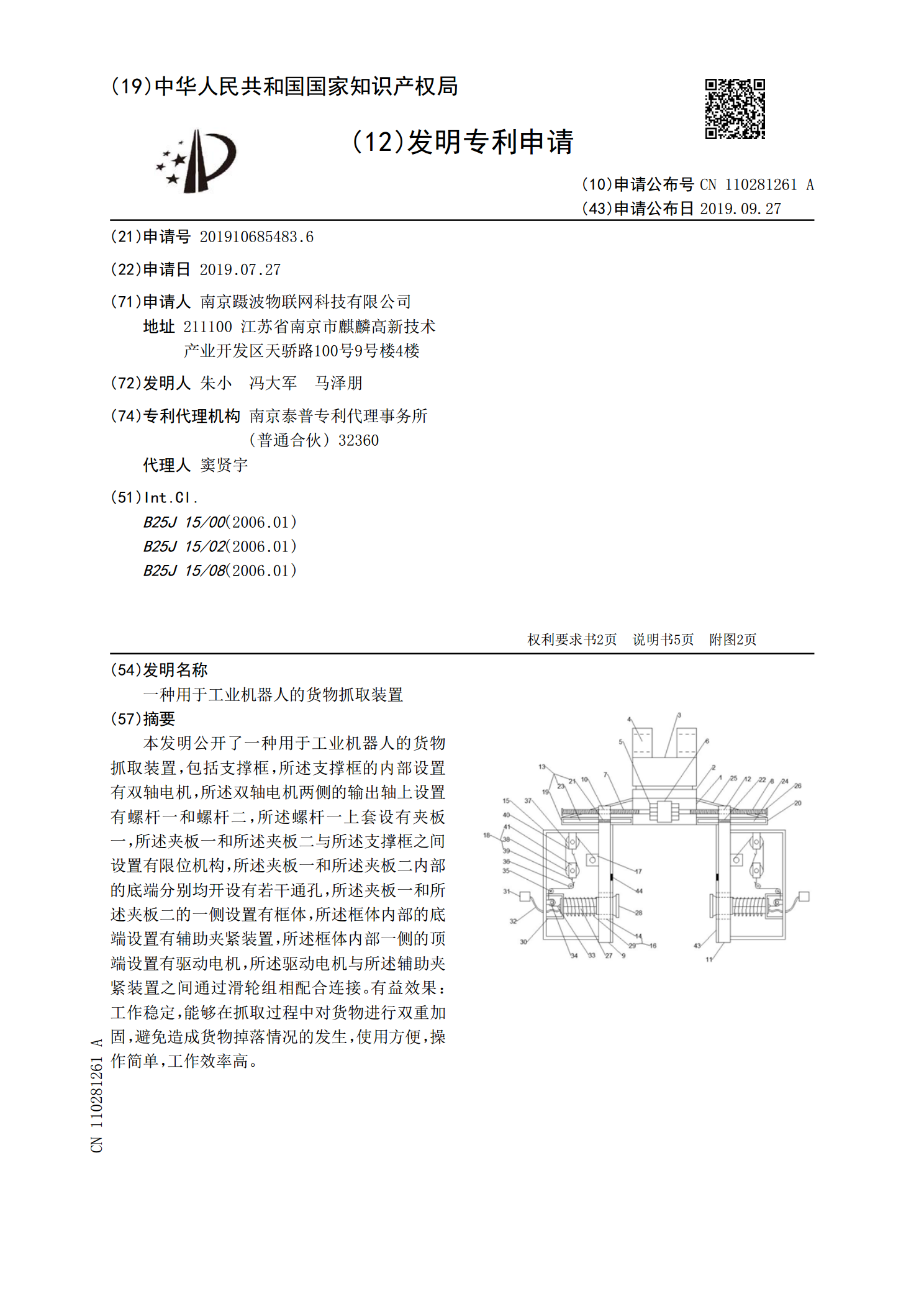
本发明公开了一种用于工业机器人的货物抓取装置,包括支撑框,所述支撑框的内部设置有双轴电机,所述双轴电机两侧的输出轴上设置有螺杆一和螺杆二,所述螺杆一上套设有夹板一,所述夹板一和所述夹板二与所述支撑框之间设置有限位机构,所述夹板一和所述夹板二内部的底端分别均开设有若干通孔,所述夹板一和所述夹板二的一侧设置有框体,所述框体内部的底端设置有辅助夹紧装置,所述框体内部一侧的顶端设置有驱动电机,所述驱动电机与所述辅助夹紧装置之间通过滑轮组相配合连接。有益效果:工作稳定,能够在抓取过程中对货物进行双重加固,避免造成货
一种用于工业机器人的货物抓取装置.pdf
本发明公开了一种用于工业机器人的货物抓取装置,涉及工业机器人技术领域,解决了现有装置不便于对抓取结构进行倾斜角度控制的问题。一种用于工业机器人的货物抓取装置,包括机械臂主体;所述机械臂主体底座左侧固定连接有液压泵机;所述机械臂主体顶部末端通过铰连接设置有一级调角结构;所述一级铰接座前端通过铰连接设置有二级调角结构;所述二级调角结构前端设置有灵活抓取结构;通过控制部电路控制四角液压缸伸缩部伸缩,通过与支撑架配合,可以对四组内侧板角度进行调节,从而可以控制四组内侧板前端铰连接的调角盘倾斜度,从而可以使调角盘前
一种用于袋装货物的码垛机器人抓取装置.pdf
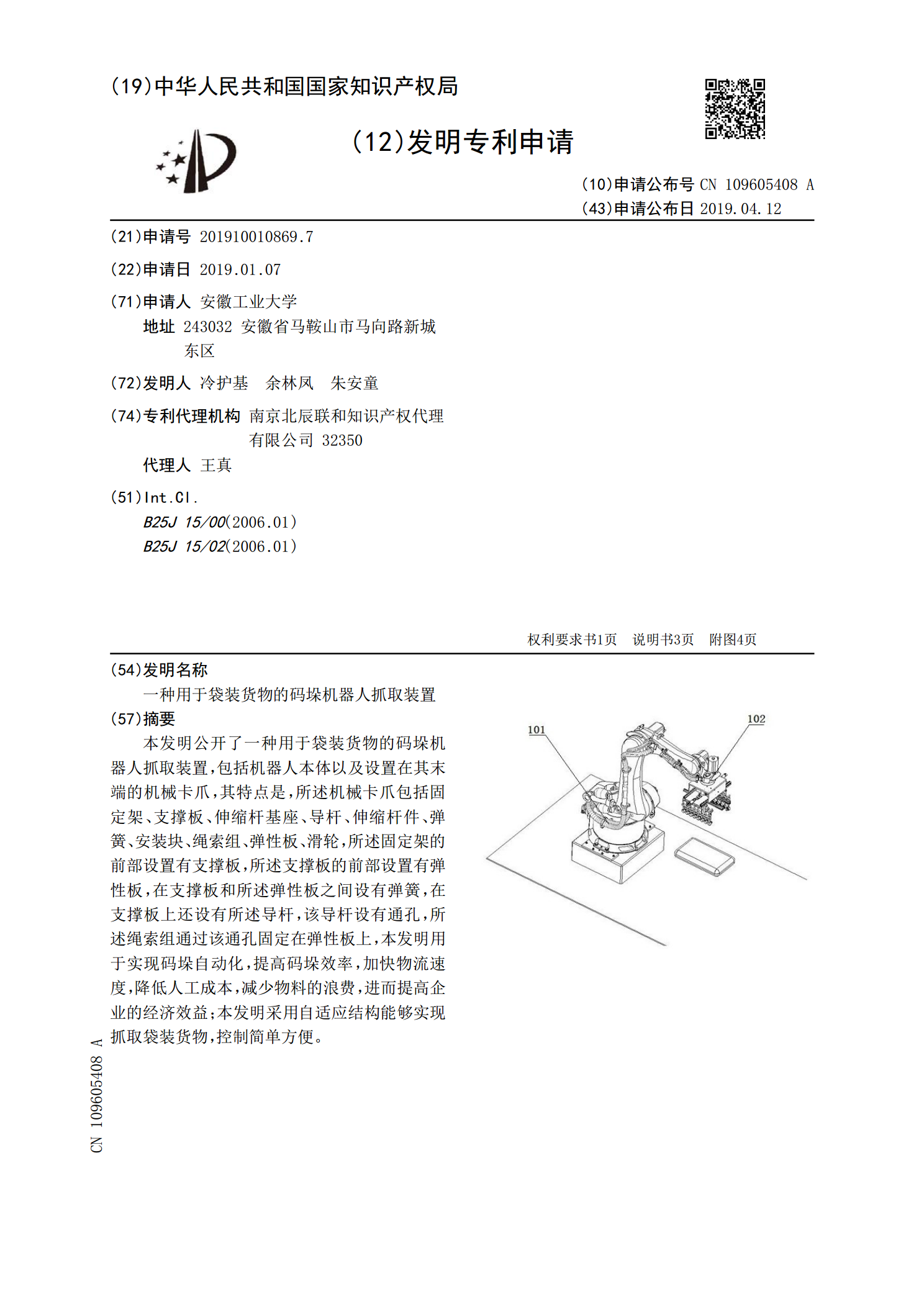
本发明公开了一种用于袋装货物的码垛机器人抓取装置,包括机器人本体以及设置在其末端的机械卡爪,其特点是,所述机械卡爪包括固定架、支撑板、伸缩杆基座、导杆、伸缩杆件、弹簧、安装块、绳索组、弹性板、滑轮,所述固定架的前部设置有支撑板,所述支撑板的前部设置有弹性板,在支撑板和所述弹性板之间设有弹簧,在支撑板上还设有所述导杆,该导杆设有通孔,所述绳索组通过该通孔固定在弹性板上,本发明用于实现码垛自动化,提高码垛效率,加快物流速度,降低人工成本,减少物料的浪费,进而提高企业的经济效益;本发明采用自适应结构能够实现抓取