
路面积水检测方法及装置.pdf

一条****发啊

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
路面积水检测方法及装置.pdf
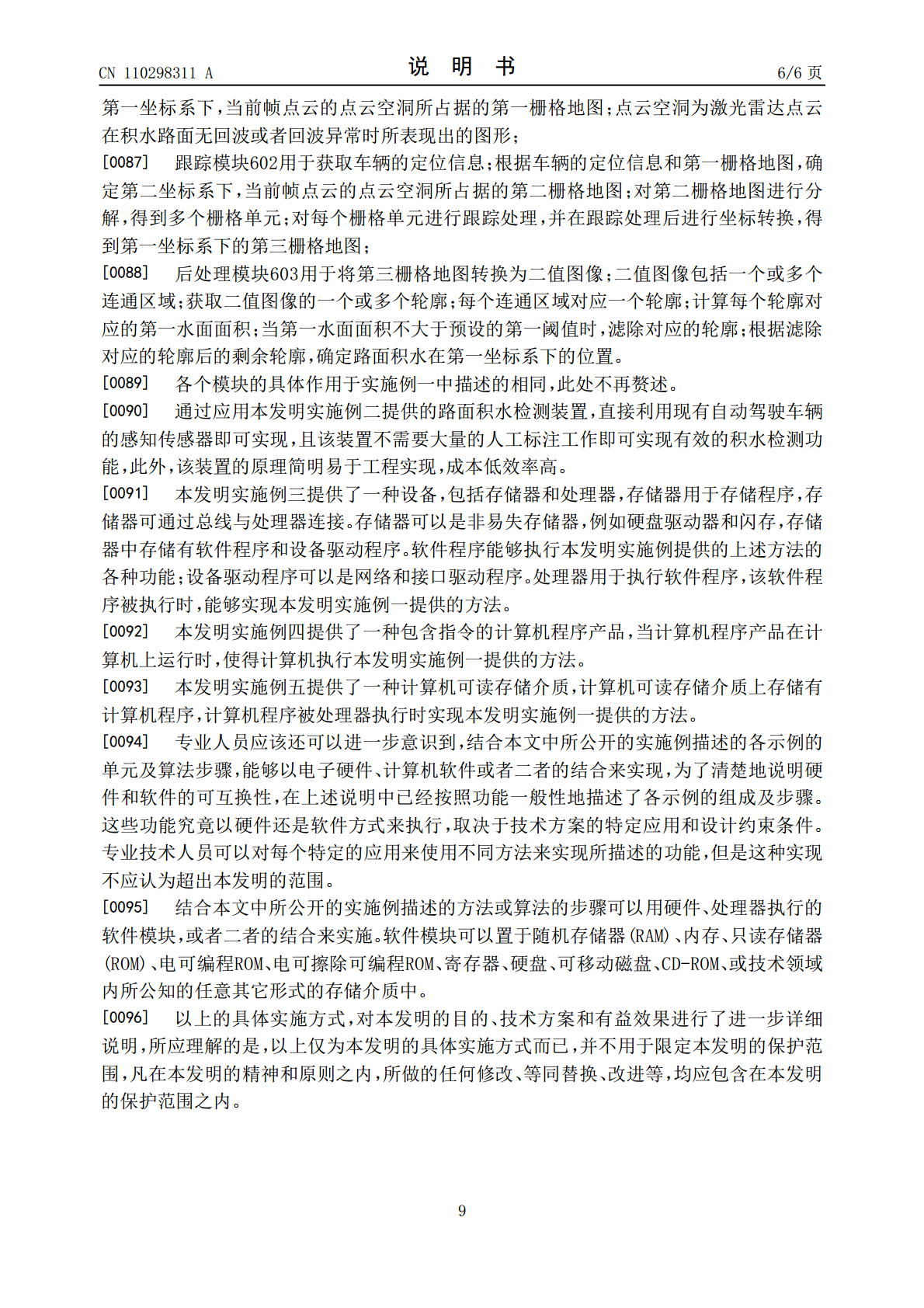
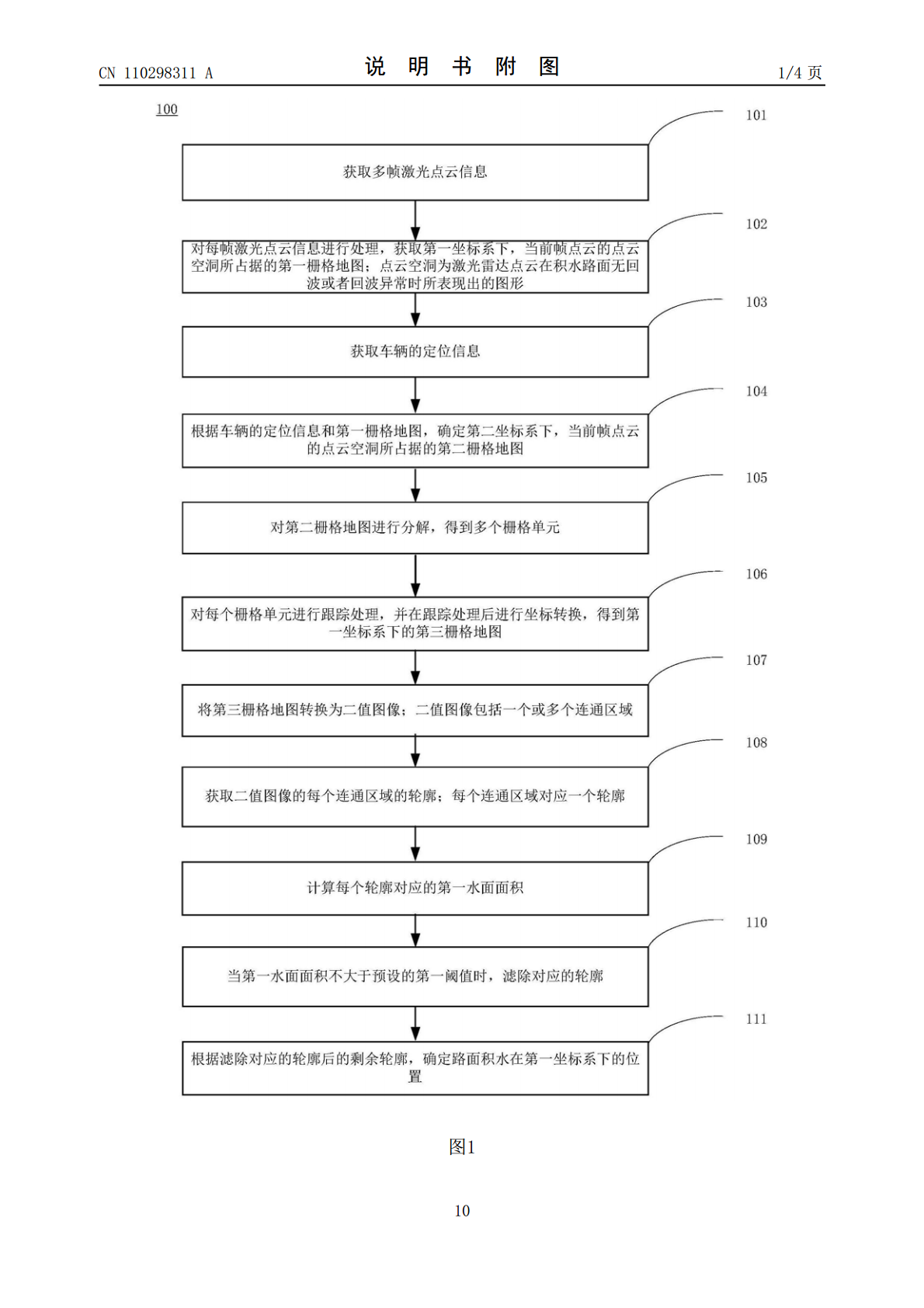
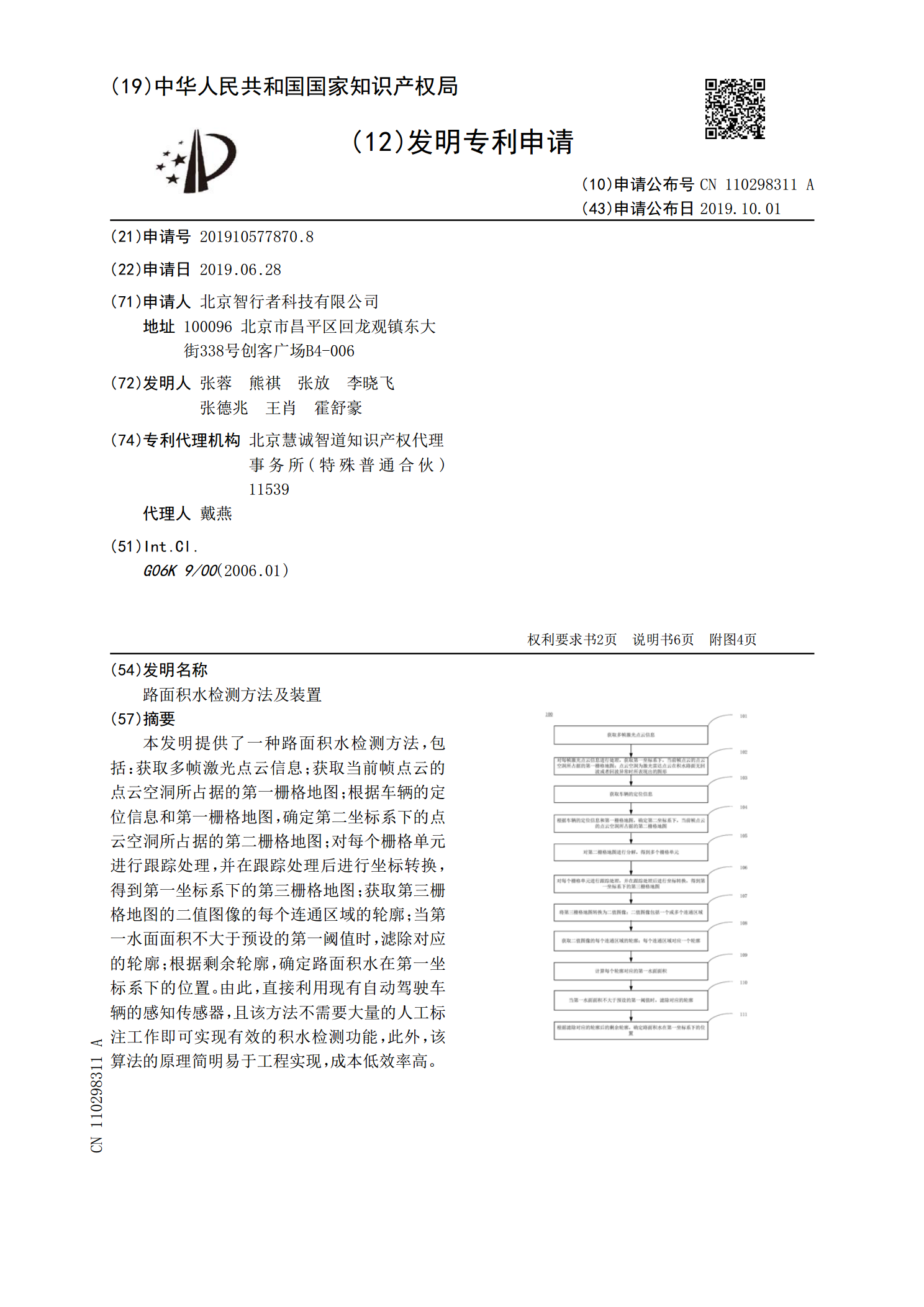
本发明提供了一种路面积水检测方法,包括:获取多帧激光点云信息;获取当前帧点云的点云空洞所占据的第一栅格地图;根据车辆的定位信息和第一栅格地图,确定第二坐标系下的点云空洞所占据的第二栅格地图;对每个栅格单元进行跟踪处理,并在跟踪处理后进行坐标转换,得到第一坐标系下的第三栅格地图;获取第三栅格地图的二值图像的每个连通区域的轮廓;当第一水面面积不大于预设的第一阈值时,滤除对应的轮廓;根据剩余轮廓,确定路面积水在第一坐标系下的位置。由此,直接利用现有自动驾驶车辆的感知传感器,且该方法不需要大量的人工标注工作即可实
路面积水深度的检测方法、装置和存储介质.pdf
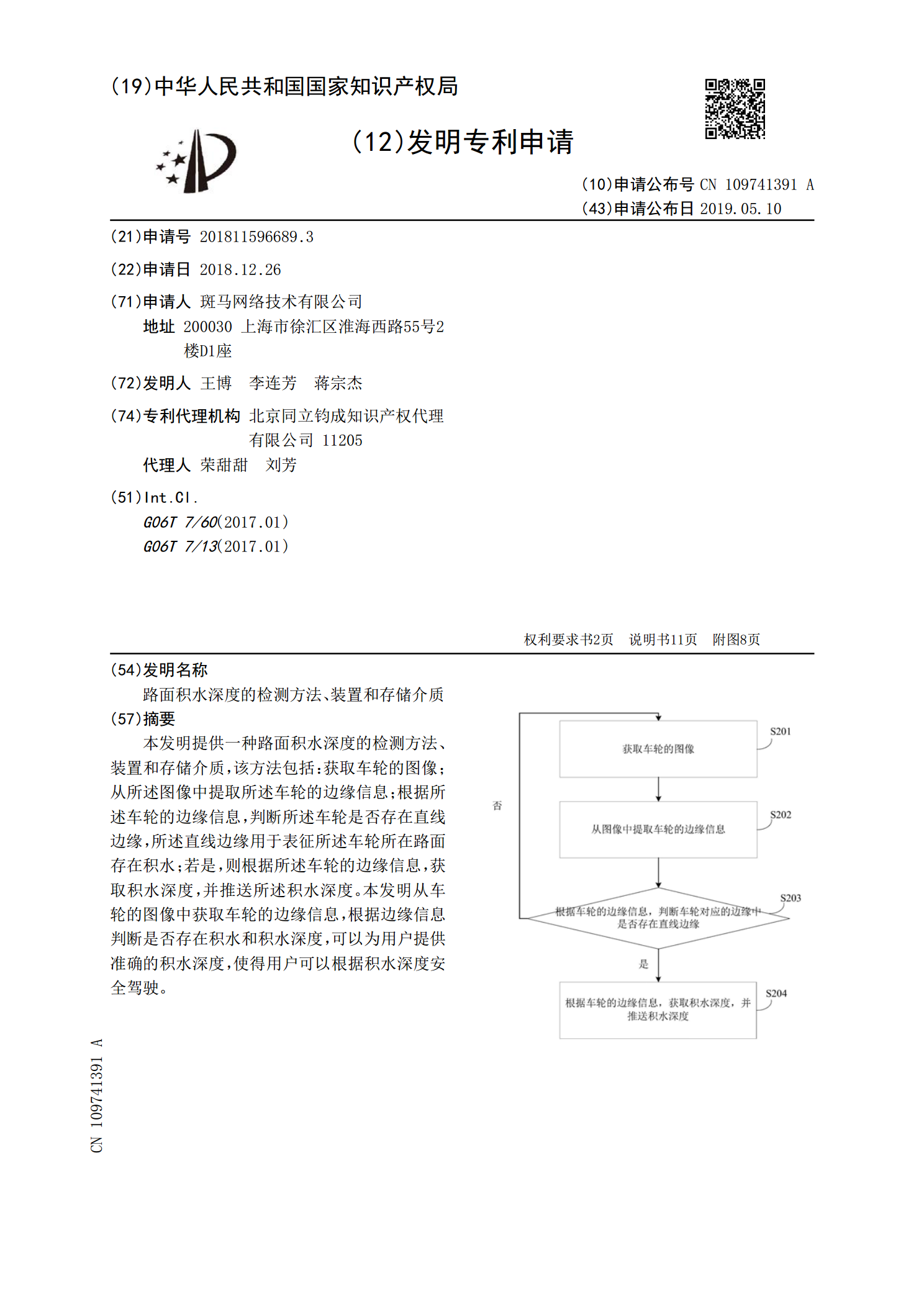
本发明提供一种路面积水深度的检测方法、装置和存储介质,该方法包括:获取车轮的图像;从所述图像中提取所述车轮的边缘信息;根据所述车轮的边缘信息,判断所述车轮是否存在直线边缘,所述直线边缘用于表征所述车轮所在路面存在积水;若是,则根据所述车轮的边缘信息,获取积水深度,并推送所述积水深度。本发明从车轮的图像中获取车轮的边缘信息,根据边缘信息判断是否存在积水和积水深度,可以为用户提供准确的积水深度,使得用户可以根据积水深度安全驾驶。
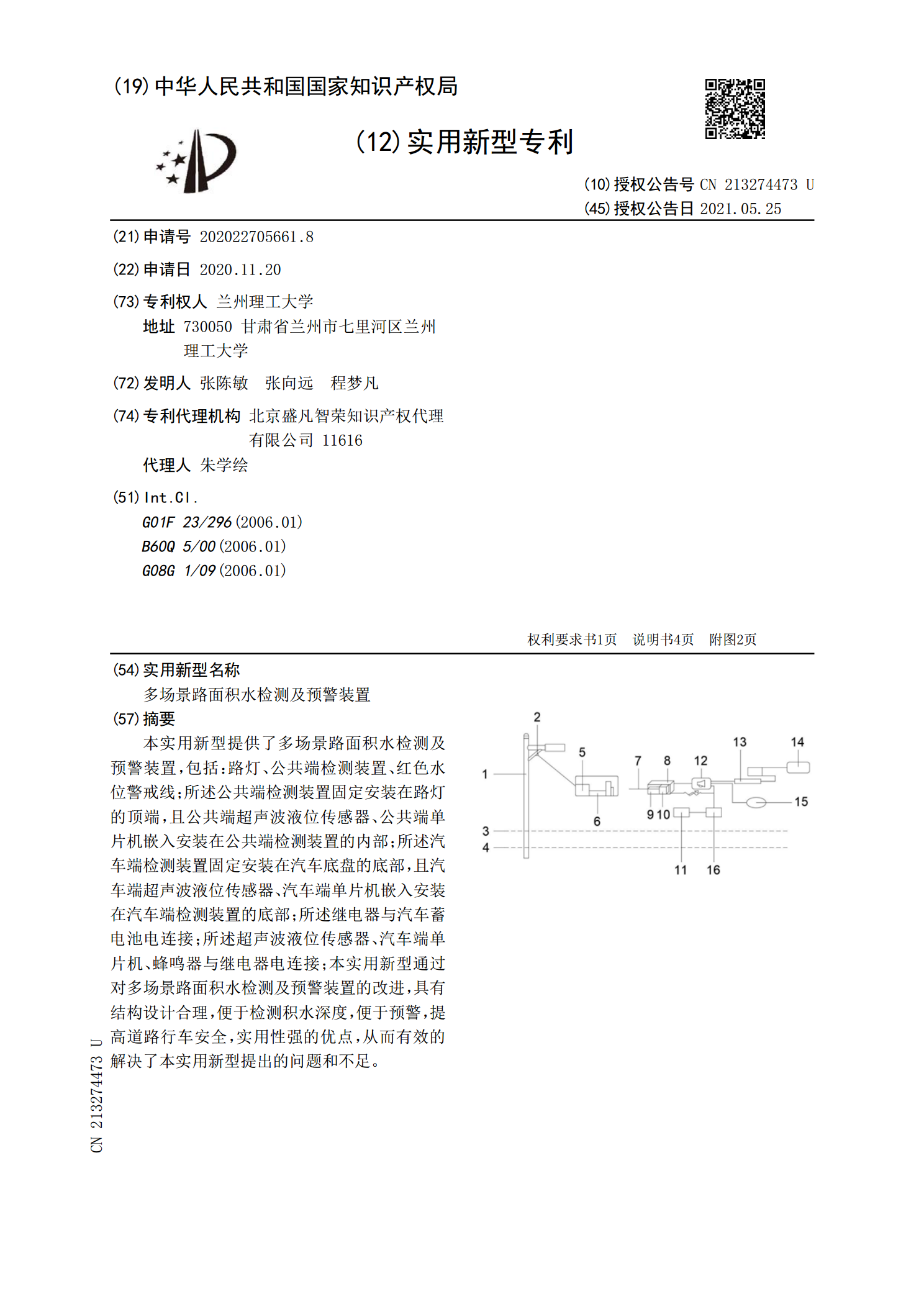
多场景路面积水检测及预警装置.pdf
本实用新型提供了多场景路面积水检测及预警装置,包括:路灯、公共端检测装置、红色水位警戒线;所述公共端检测装置固定安装在路灯的顶端,且公共端超声波液位传感器、公共端单片机嵌入安装在公共端检测装置的内部;所述汽车端检测装置固定安装在汽车底盘的底部,且汽车端超声波液位传感器、汽车端单片机嵌入安装在汽车端检测装置的底部;所述继电器与汽车蓄电池电连接;所述超声波液位传感器、汽车端单片机、蜂鸣器与继电器电连接;本实用新型通过对多场景路面积水检测及预警装置的改进,具有结构设计合理,便于检测积水深度,便于预警,提高道路行
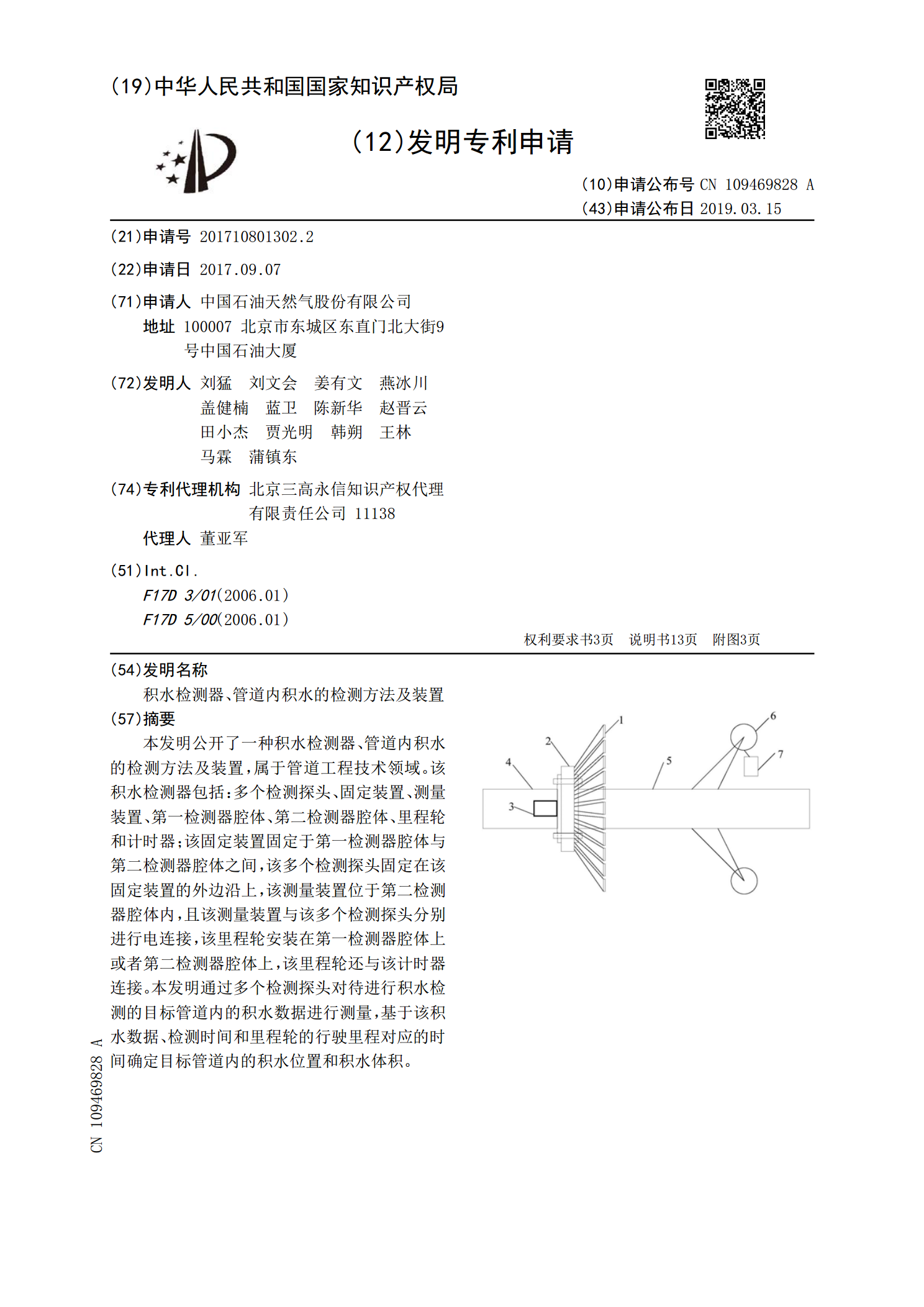
积水检测器、管道内积水的检测方法及装置.pdf
本发明公开了一种积水检测器、管道内积水的检测方法及装置,属于管道工程技术领域。该积水检测器包括:多个检测探头、固定装置、测量装置、第一检测器腔体、第二检测器腔体、里程轮和计时器;该固定装置固定于第一检测器腔体与第二检测器腔体之间,该多个检测探头固定在该固定装置的外边沿上,该测量装置位于第二检测器腔体内,且该测量装置与该多个检测探头分别进行电连接,该里程轮安装在第一检测器腔体上或者第二检测器腔体上,该里程轮还与该计时器连接。本发明通过多个检测探头对待进行积水检测的目标管道内的积水数据进行测量,基于该积水数据

如何控制广场路面积水-控制广场路面积水的方法.docx
如何控制广场路面积水-控制广场路面积水的方法如何控制广场路面积水-控制广场路面积水的方法随着我国城市建设的大力发展,各城市中心广场大量建设,由于广场路面面积较大,在设计和施工中稍有不认真就会造成路面排水不畅及局部积水,如何解决积水问题是呈现在设计和施工者面前的重要课题。下面,小编为大家分享控制广场路面积水的方法,希望对大家有帮助!认真检查及时处理积水按常规方法检查应是广场砖(花岗岩)贴完后,等水泥砂浆达到一定强度后方能检查。但这样检查,查出的问题很难处理,且易造成较大的.经济损失,我们设计单位要求施工单位