
路面积水深度的检测方法、装置和存储介质.pdf

是你****馨呀

1/10

2/10
3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
路面积水深度的检测方法、装置和存储介质.pdf
本发明提供一种路面积水深度的检测方法、装置和存储介质,该方法包括:获取车轮的图像;从所述图像中提取所述车轮的边缘信息;根据所述车轮的边缘信息,判断所述车轮是否存在直线边缘,所述直线边缘用于表征所述车轮所在路面存在积水;若是,则根据所述车轮的边缘信息,获取积水深度,并推送所述积水深度。本发明从车轮的图像中获取车轮的边缘信息,根据边缘信息判断是否存在积水和积水深度,可以为用户提供准确的积水深度,使得用户可以根据积水深度安全驾驶。

路面积水监测方法、装置、存储介质及电子设备.pdf
本申请实施例公开了一种路面积水监测方法及相关设备,涉及路况监测技术领域。该方法包括:通过声音采集装置获取监测区域的声音信号;提取声音信号中的目标声音特征;查找与目标信息对应的预设声音特征,以得到路面积水信息,其中,目标信息包括目标声音特征,预设声音特征与路面积水信息存在映射关系,映射关系基于预设模型得到,预设模型为建立训练信息与路面积水信息之间关系的抽象模型,训练信息包括训练声音特征。本发明用于路面积水监测,主要为解决目前在进行路面积水监测时,不能方便稳定地监测到积水深度的问题。
路面积水检测方法及装置.pdf
本发明提供了一种路面积水检测方法,包括:获取多帧激光点云信息;获取当前帧点云的点云空洞所占据的第一栅格地图;根据车辆的定位信息和第一栅格地图,确定第二坐标系下的点云空洞所占据的第二栅格地图;对每个栅格单元进行跟踪处理,并在跟踪处理后进行坐标转换,得到第一坐标系下的第三栅格地图;获取第三栅格地图的二值图像的每个连通区域的轮廓;当第一水面面积不大于预设的第一阈值时,滤除对应的轮廓;根据剩余轮廓,确定路面积水在第一坐标系下的位置。由此,直接利用现有自动驾驶车辆的感知传感器,且该方法不需要大量的人工标注工作即可实

路面检测方法及装置、电子设备、存储介质.pdf
本公开揭示了一种路面检测方法及装置、电子设备、计算机可读存储介质,该方法包括:获取包含路面区域的V视差图,在V视差图中拟合代表路面区域的全局路面参考线;根据全局路面参考线确定V视差图中的路面支撑点;将V视差图纵向切分为若干子图像,分别对每张子图像中的路面支撑点进行直线拟合,得到每张子图像中代表路面区域的斜线段;根据所述全局路面参考线,对若干子图像中代表路面区域的斜线段进行修正,得到优化后的代表路面区域的斜线段。本公开提供的技术方案,可以提高V视差图中远处路面斜线段的检测准确性,解决因远处视差点较少拟合斜线
漏洞检测方法、装置和存储介质.pdf
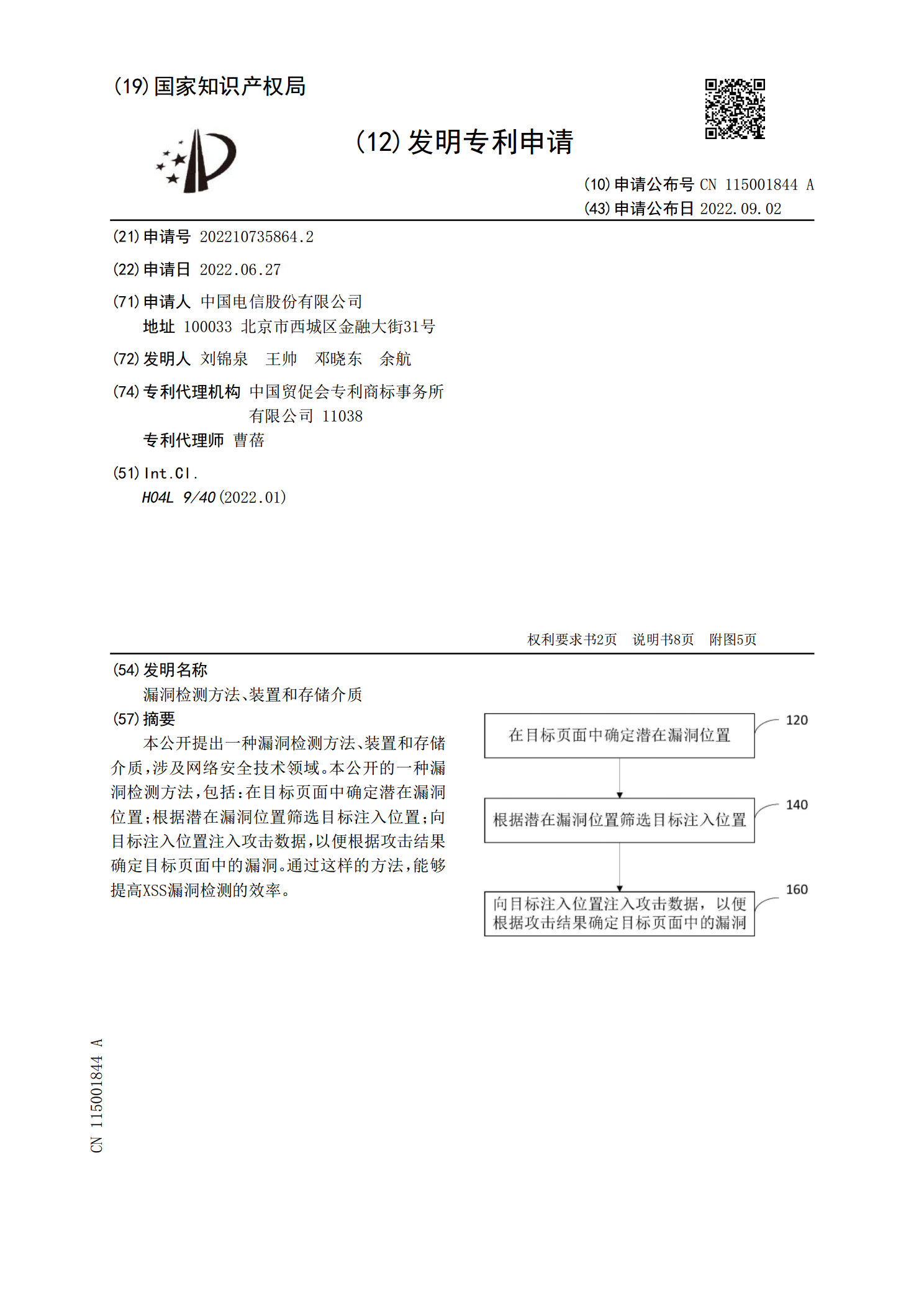
本公开提出一种漏洞检测方法、装置和存储介质,涉及网络安全技术领域。本公开的一种漏洞检测方法,包括:在目标页面中确定潜在漏洞位置;根据潜在漏洞位置筛选目标注入位置;向目标注入位置注入攻击数据,以便根据攻击结果确定目标页面中的漏洞。通过这样的方法,能够提高XSS漏洞检测的效率。