
一种自动驾驶AVG转向控制系统及方法.pdf

又珊****ck

1/8
2/8
3/8
4/8
5/8
6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种自动驾驶AVG转向控制系统及方法.pdf
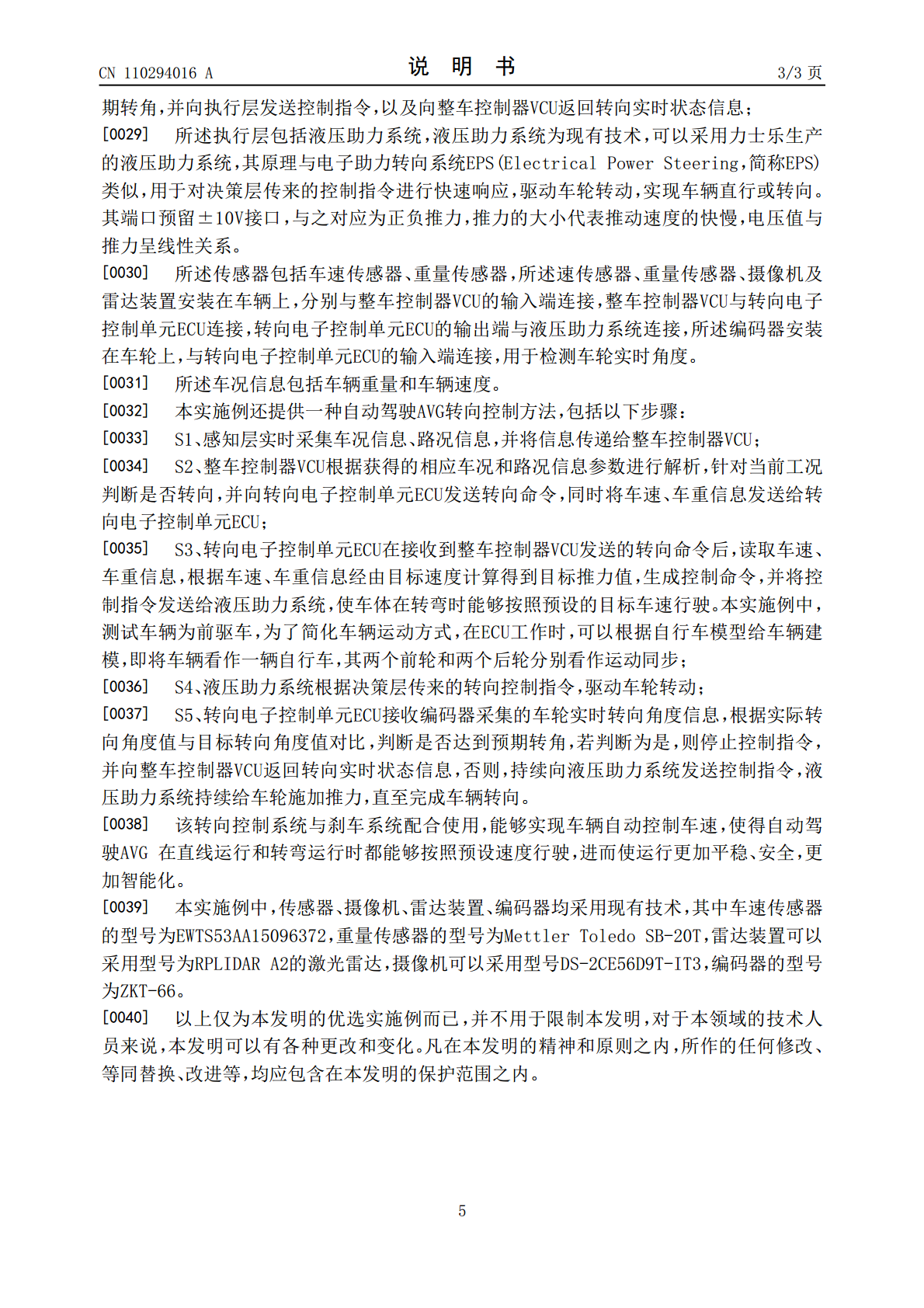
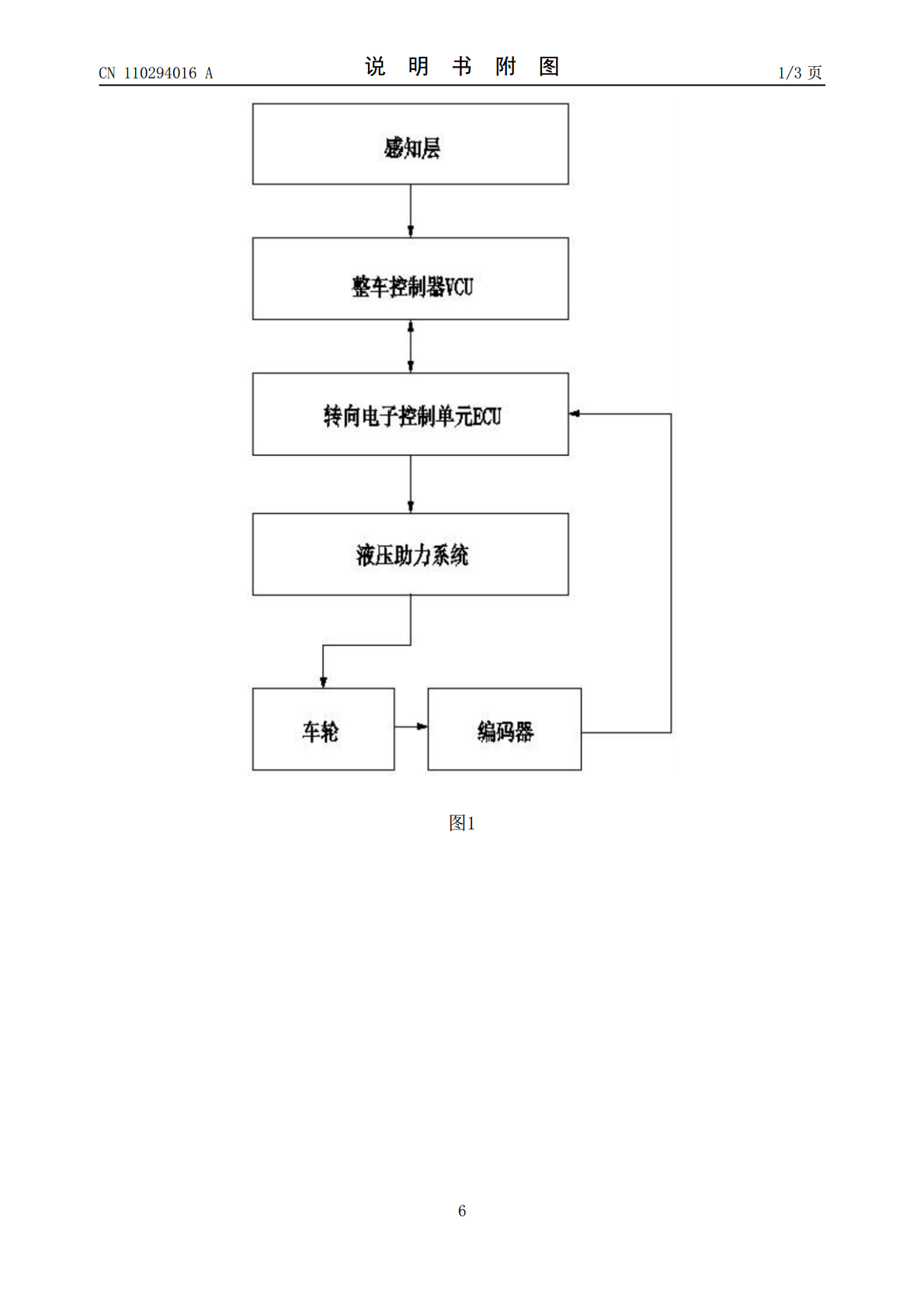
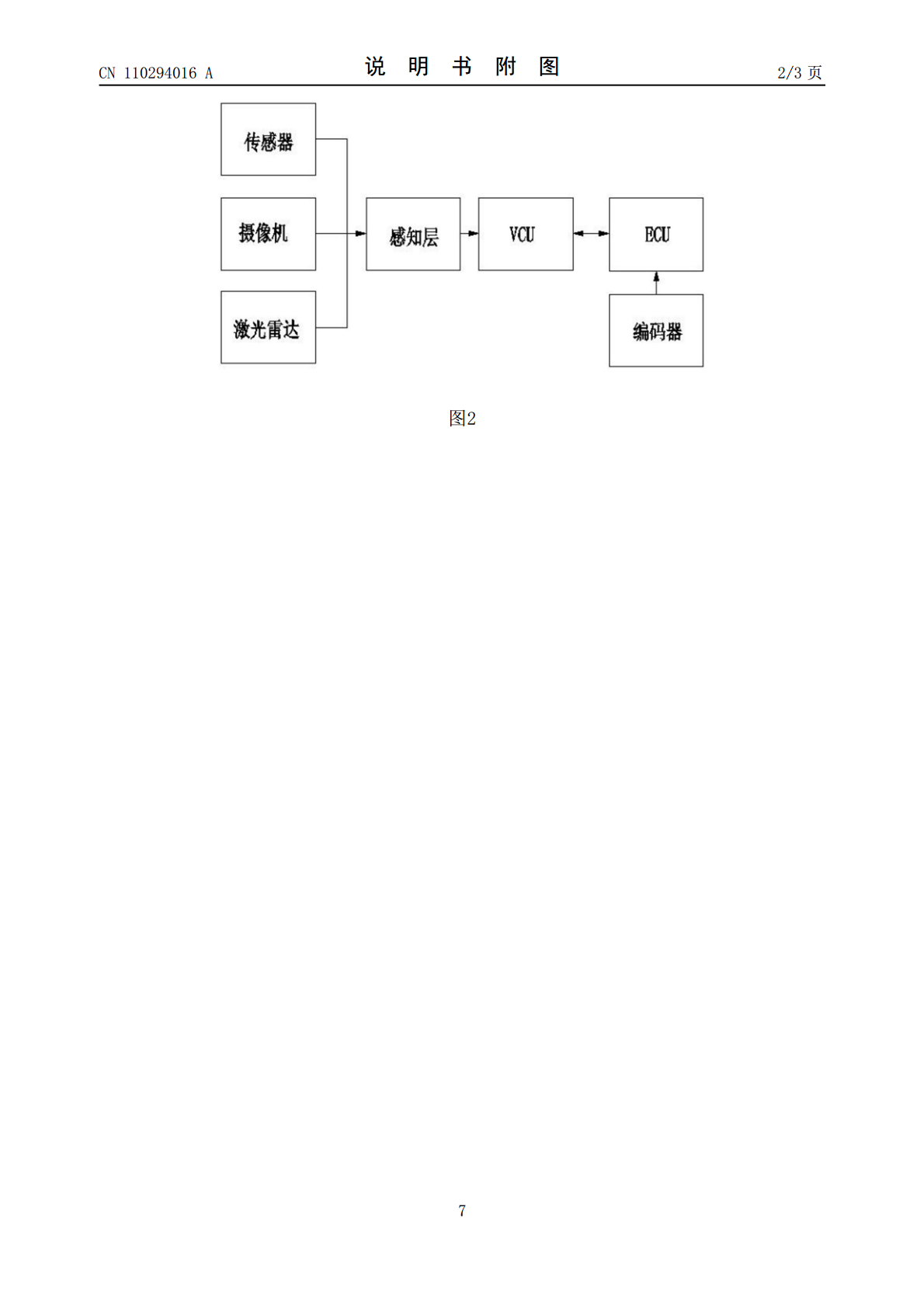
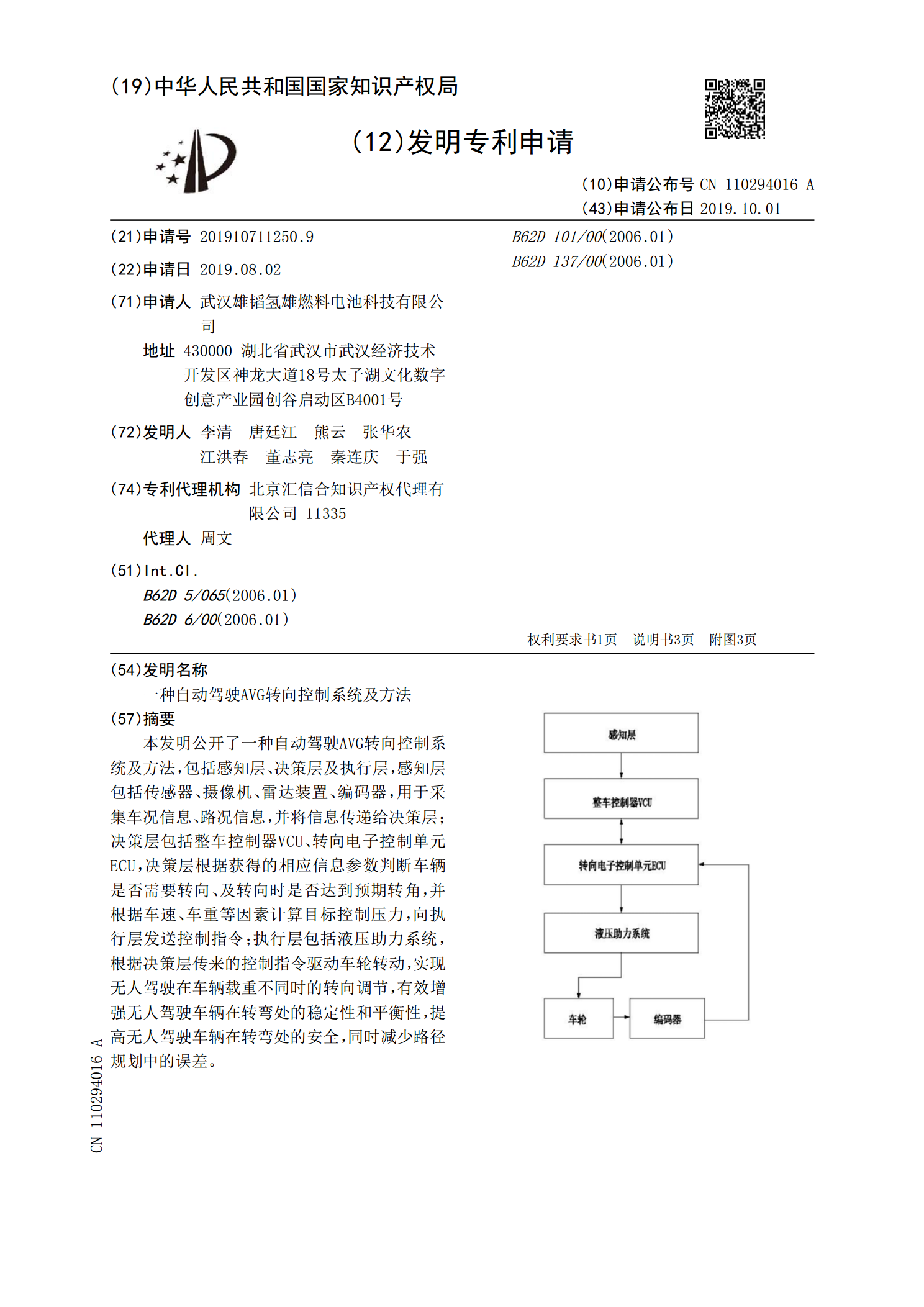
本发明公开了一种自动驾驶AVG转向控制系统及方法,包括感知层、决策层及执行层,感知层包括传感器、摄像机、雷达装置、编码器,用于采集车况信息、路况信息,并将信息传递给决策层;决策层包括整车控制器VCU、转向电子控制单元ECU,决策层根据获得的相应信息参数判断车辆是否需要转向、及转向时是否达到预期转角,并根据车速、车重等因素计算目标控制压力,向执行层发送控制指令;执行层包括液压助力系统,根据决策层传来的控制指令驱动车轮转动,实现无人驾驶在车辆载重不同时的转向调节,有效增强无人驾驶车辆在转弯处的稳定性和平衡性,
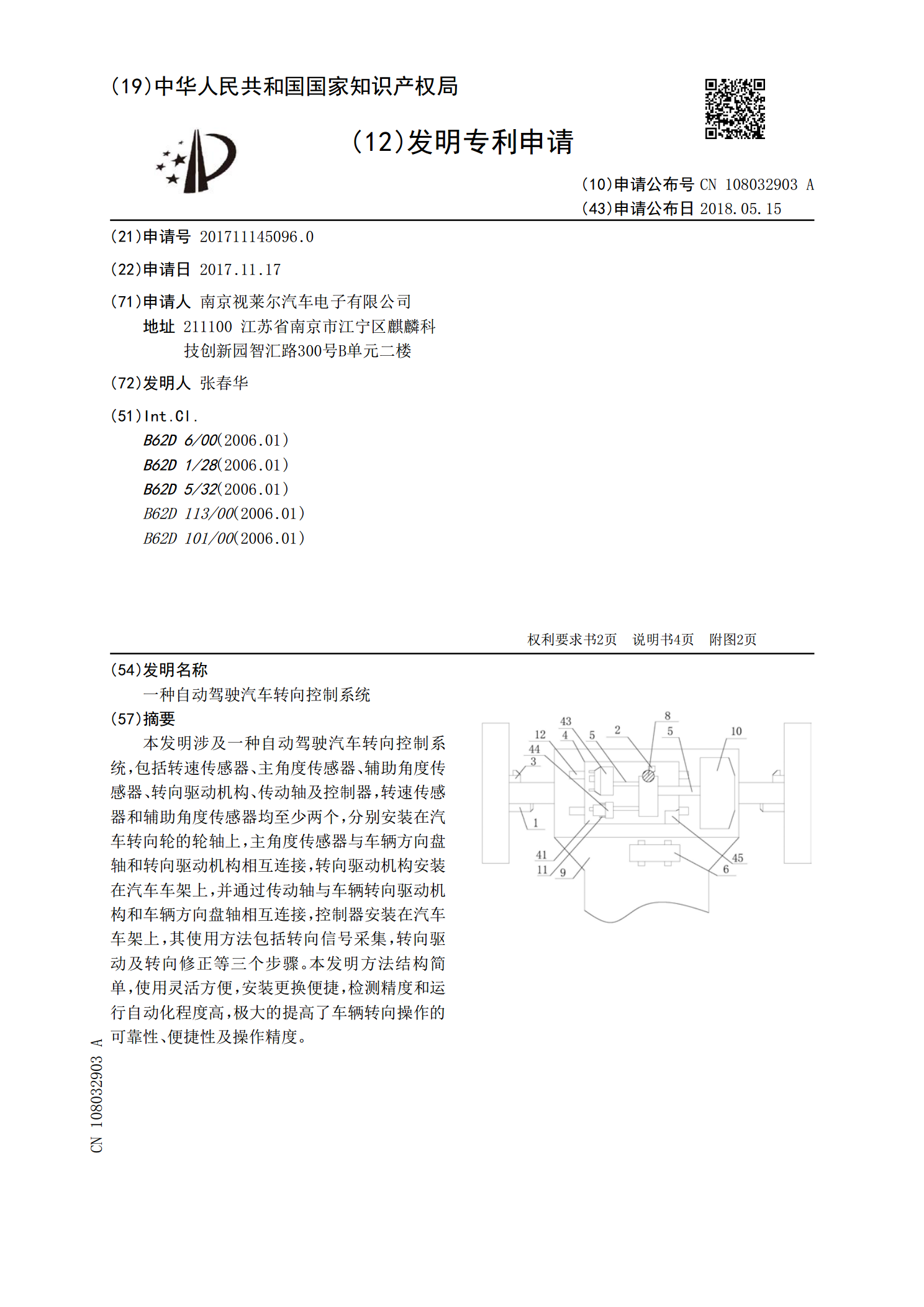
一种自动驾驶汽车转向控制系统.pdf
本发明涉及一种自动驾驶汽车转向控制系统,包括转速传感器、主角度传感器、辅助角度传感器、转向驱动机构、传动轴及控制器,转速传感器和辅助角度传感器均至少两个,分别安装在汽车转向轮的轮轴上,主角度传感器与车辆方向盘轴和转向驱动机构相互连接,转向驱动机构安装在汽车车架上,并通过传动轴与车辆转向驱动机构和车辆方向盘轴相互连接,控制器安装在汽车车架上,其使用方法包括转向信号采集,转向驱动及转向修正等三个步骤。本发明方法结构简单,使用灵活方便,安装更换便捷,检测精度和运行自动化程度高,极大的提高了车辆转向操作的可靠性、

一种自动驾驶转向装置.pdf
一种自动驾驶转向装置,包括套件、转向杆、第一传动元件、第二传动元件,其中第一传动元件安装固定在转向杆上并在套件内部,套件与车架内部之间是相通的,驱动装置、第二传动元件所在轴在其中,驱动装置轴与位于车架内的第二传动元件所在轴有耦合连接和分离切断两种状态。本发明结构紧凑、拆装方便,在车体内部实现驱动装置带动转向杆实现全向转向的结构,丝杆装置带动驱动装置或拨叉带动旋转件移动时达到无阻力的手动转向模式。外接控制系统可实现自行车、电动车、摩托车、两轮车模型、三轮车等交通工具的自动驾驶。

一种自动驾驶转向装置.pdf
本发明公开了一种自动驾驶转向装置,包括减速器、齿条,所述减速器两侧各设置有一根动力输出轴,其中一根所述动力输出轴端部设置有球头座,所述球头座内设置有传动杆,所述传动杆上方设置有方向盘,所述传动杆中部设置有扭矩传感器,另一根所述动力输出轴端部设置有齿轮,所述齿轮下方设置有所述齿条,所述齿条外部设置有防护箱,所述防护箱内底部设置有滑槽,所述滑槽内设置有滚珠,所述防护箱内侧壁上设置有红外位移检测器。有益效果在于:可以降低所述齿条移动时的摩擦力,使得传动精准度更高,延长所述齿条的使用寿命,而且可以从多方位对汽车转
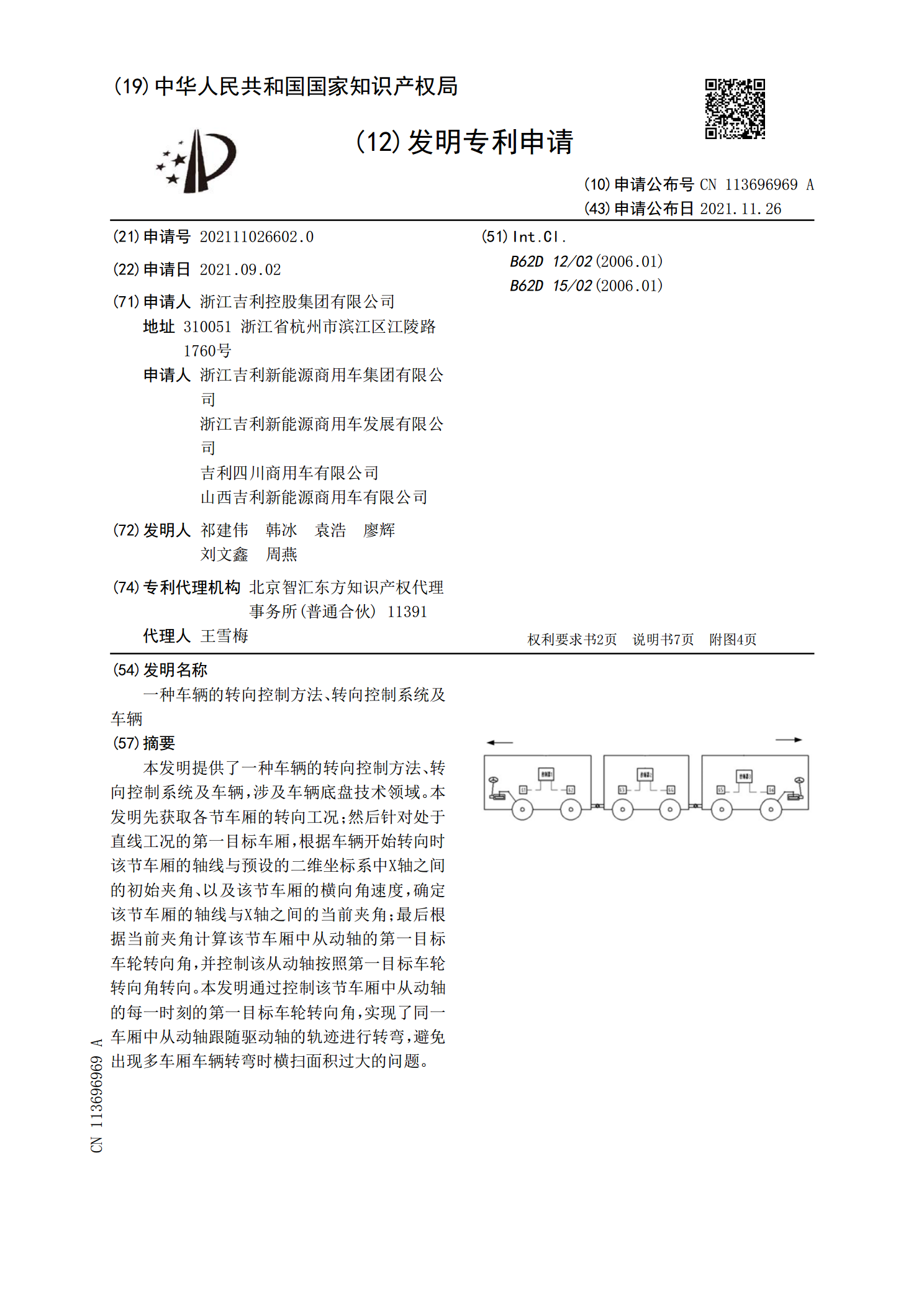
一种车辆的转向控制方法、转向控制系统及车辆.pdf
本发明提供了一种车辆的转向控制方法、转向控制系统及车辆,涉及车辆底盘技术领域。本发明先获取各节车厢的转向工况;然后针对处于直线工况的第一目标车厢,根据车辆开始转向时该节车厢的轴线与预设的二维坐标系中X轴之间的初始夹角、以及该节车厢的横向角速度,确定该节车厢的轴线与X轴之间的当前夹角;最后根据当前夹角计算该节车厢中从动轴的第一目标车轮转向角,并控制该从动轴按照第一目标车轮转向角转向。本发明通过控制该节车厢中从动轴的每一时刻的第一目标车轮转向角,实现了同一车厢中从动轴跟随驱动轴的轨迹进行转弯,避免出现多车厢车