
一种自动驾驶汽车转向控制系统.pdf

是向****23

1/9
2/9

3/9

4/9
5/9
6/9

7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种自动驾驶汽车转向控制系统.pdf
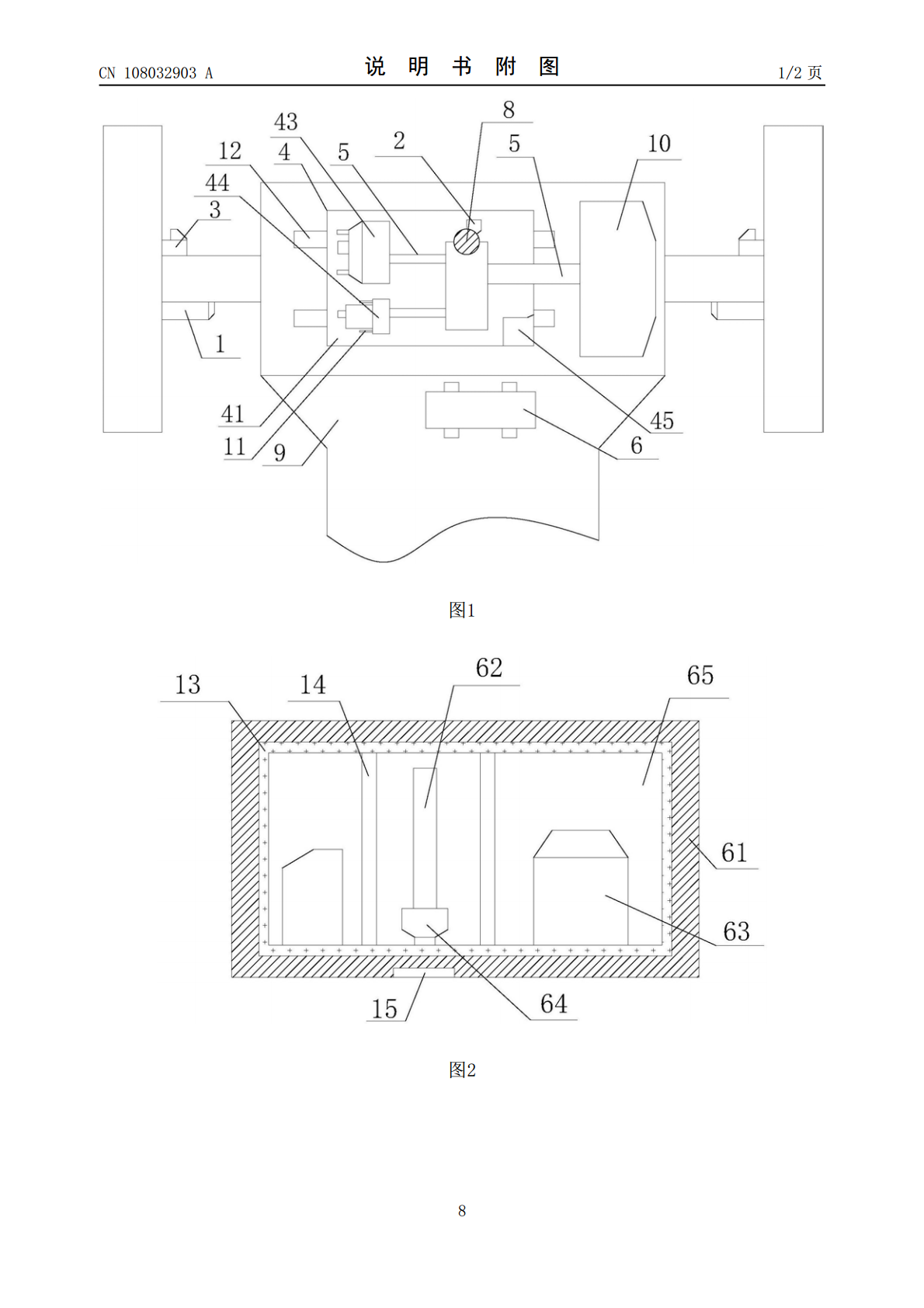
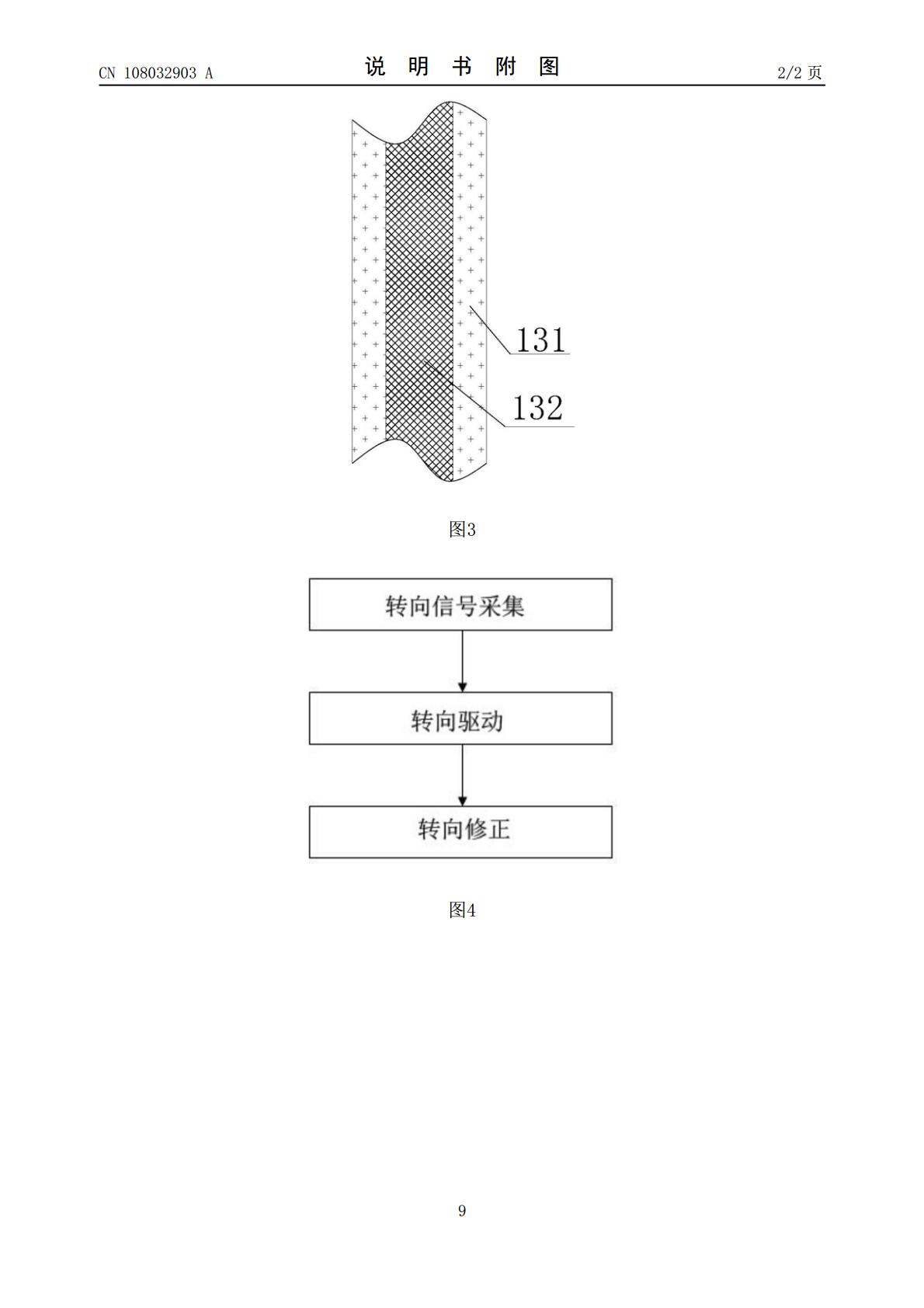
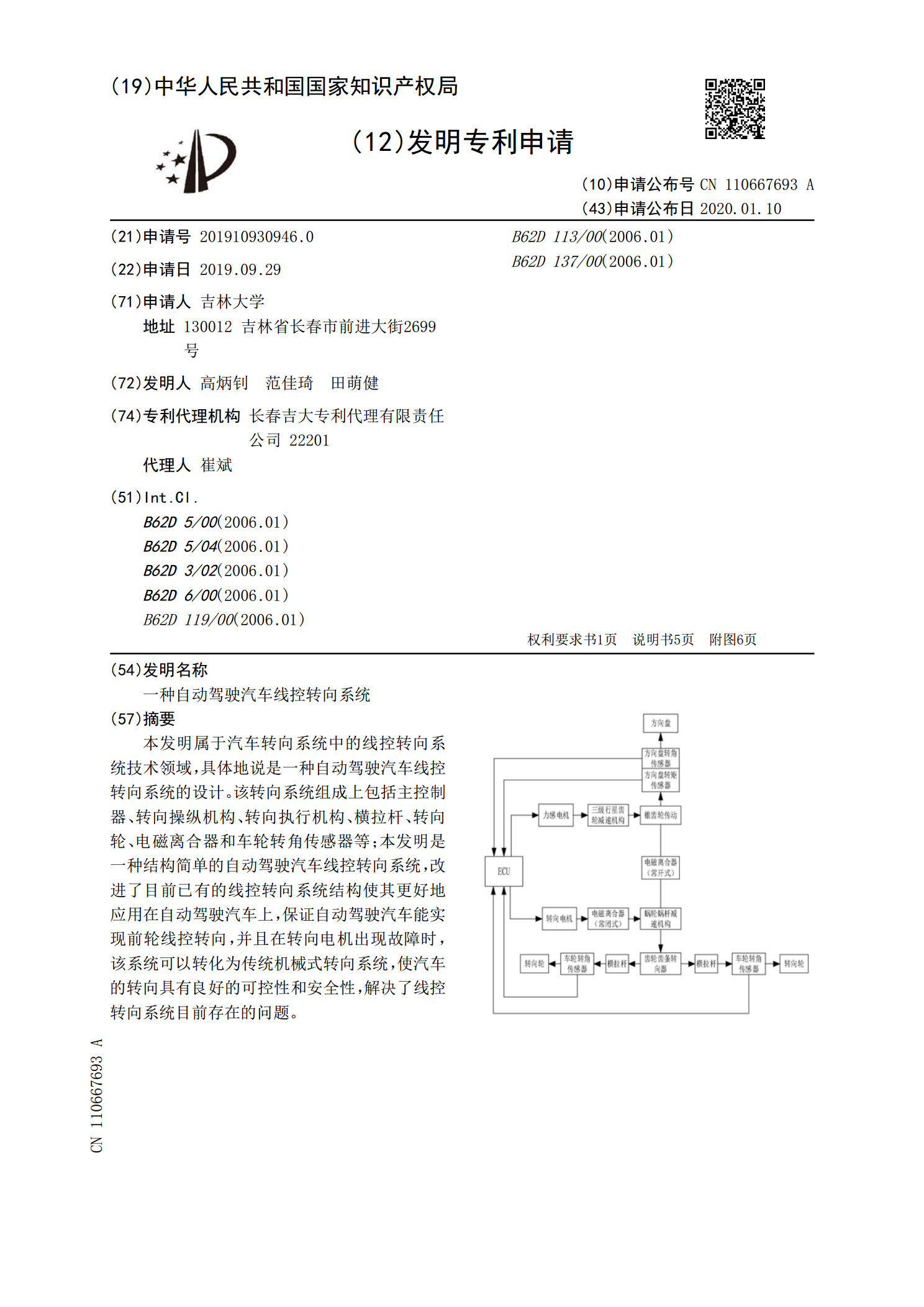
本发明涉及一种自动驾驶汽车转向控制系统,包括转速传感器、主角度传感器、辅助角度传感器、转向驱动机构、传动轴及控制器,转速传感器和辅助角度传感器均至少两个,分别安装在汽车转向轮的轮轴上,主角度传感器与车辆方向盘轴和转向驱动机构相互连接,转向驱动机构安装在汽车车架上,并通过传动轴与车辆转向驱动机构和车辆方向盘轴相互连接,控制器安装在汽车车架上,其使用方法包括转向信号采集,转向驱动及转向修正等三个步骤。本发明方法结构简单,使用灵活方便,安装更换便捷,检测精度和运行自动化程度高,极大的提高了车辆转向操作的可靠性、
一种自动驾驶汽车线控转向系统.pdf
本发明属于汽车转向系统中的线控转向系统技术领域,具体地说是一种自动驾驶汽车线控转向系统的设计。该转向系统组成上包括主控制器、转向操纵机构、转向执行机构、横拉杆、转向轮、电磁离合器和车轮转角传感器等;本发明是一种结构简单的自动驾驶汽车线控转向系统,改进了目前已有的线控转向系统结构使其更好地应用在自动驾驶汽车上,保证自动驾驶汽车能实现前轮线控转向,并且在转向电机出现故障时,该系统可以转化为传统机械式转向系统,使汽车的转向具有良好的可控性和安全性,解决了线控转向系统目前存在的问题。
一种自动驾驶AVG转向控制系统及方法.pdf
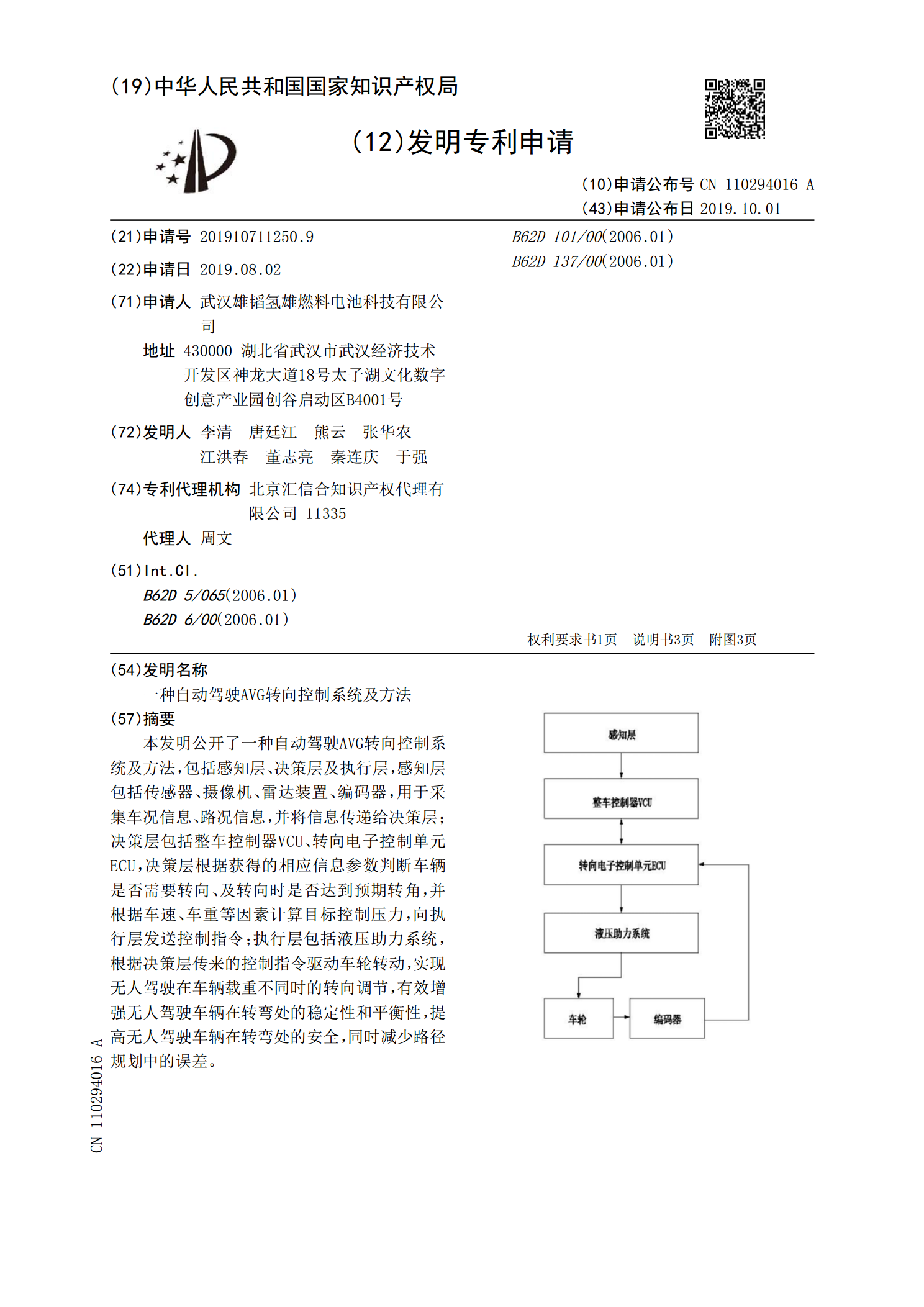
本发明公开了一种自动驾驶AVG转向控制系统及方法,包括感知层、决策层及执行层,感知层包括传感器、摄像机、雷达装置、编码器,用于采集车况信息、路况信息,并将信息传递给决策层;决策层包括整车控制器VCU、转向电子控制单元ECU,决策层根据获得的相应信息参数判断车辆是否需要转向、及转向时是否达到预期转角,并根据车速、车重等因素计算目标控制压力,向执行层发送控制指令;执行层包括液压助力系统,根据决策层传来的控制指令驱动车轮转动,实现无人驾驶在车辆载重不同时的转向调节,有效增强无人驾驶车辆在转弯处的稳定性和平衡性,
一种汽车转向控制系统、汽车及控制方法.pdf
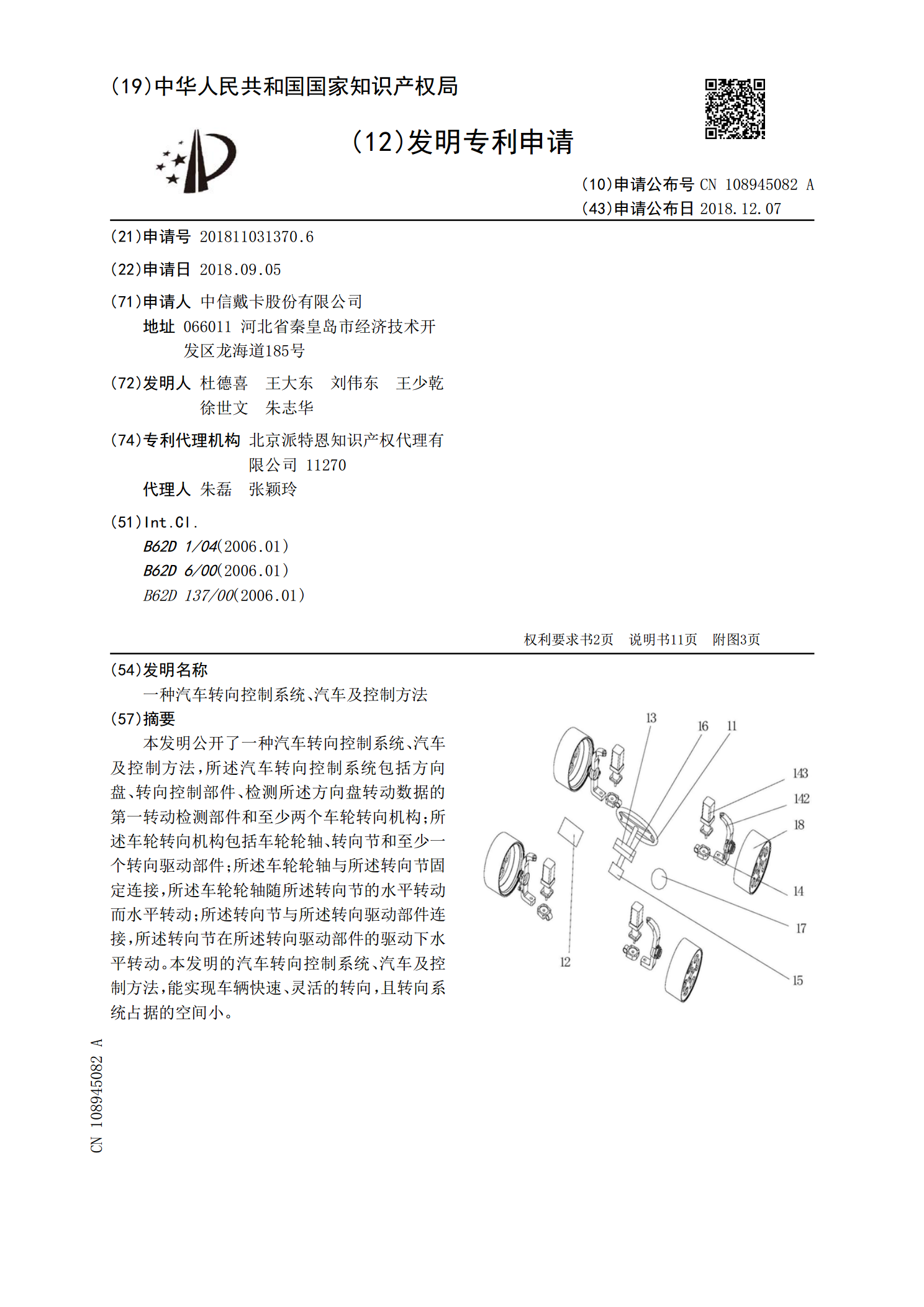
本发明公开了一种汽车转向控制系统、汽车及控制方法,所述汽车转向控制系统包括方向盘、转向控制部件、检测所述方向盘转动数据的第一转动检测部件和至少两个车轮转向机构;所述车轮转向机构包括车轮轮轴、转向节和至少一个转向驱动部件;所述车轮轮轴与所述转向节固定连接,所述车轮轮轴随所述转向节的水平转动而水平转动;所述转向节与所述转向驱动部件连接,所述转向节在所述转向驱动部件的驱动下水平转动。本发明的汽车转向控制系统、汽车及控制方法,能实现车辆快速、灵活的转向,且转向系统占据的空间小。
一种汽车安全转向控制系统.pdf
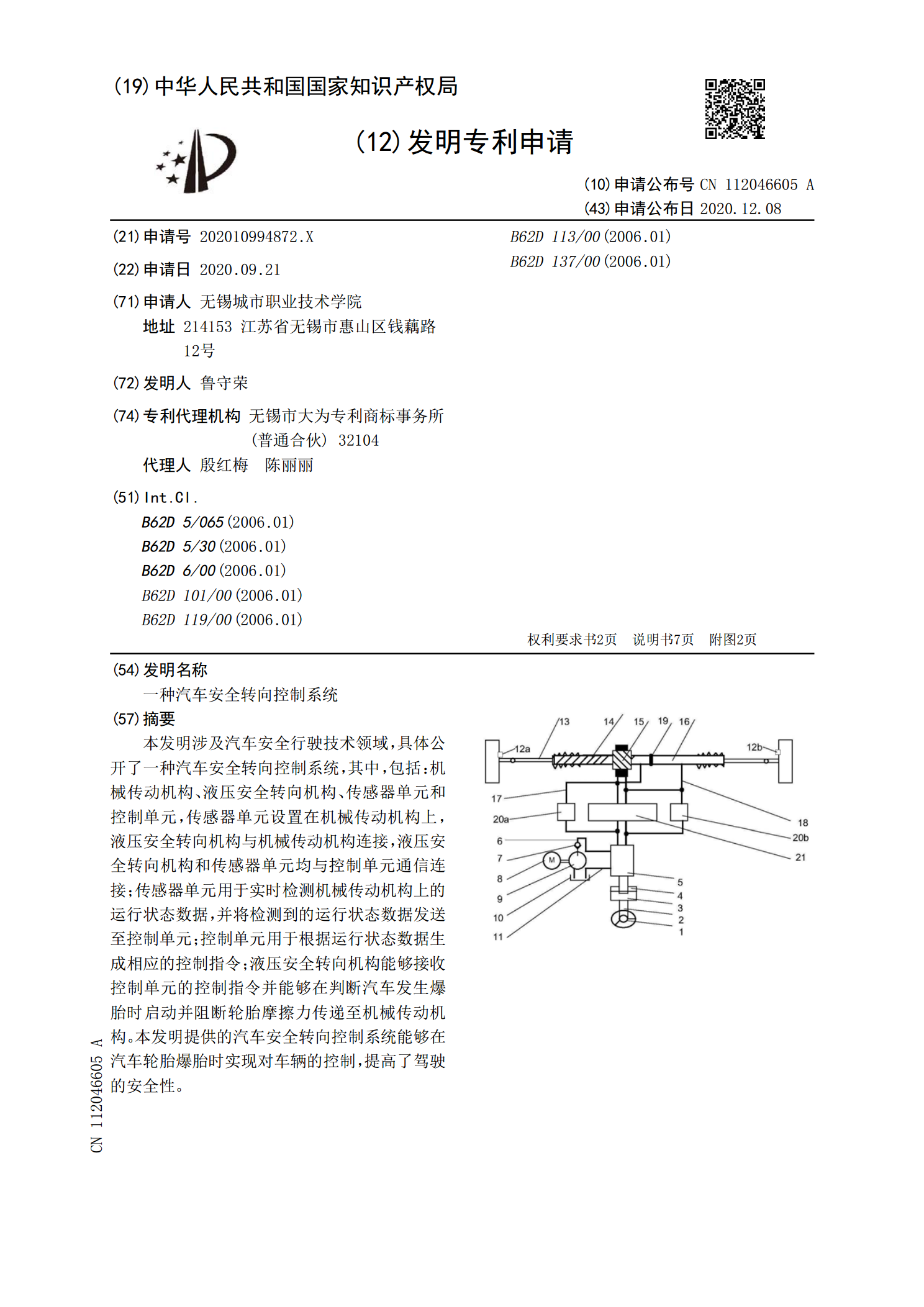
本发明涉及汽车安全行驶技术领域,具体公开了一种汽车安全转向控制系统,其中,包括:机械传动机构、液压安全转向机构、传感器单元和控制单元,传感器单元设置在机械传动机构上,液压安全转向机构与机械传动机构连接,液压安全转向机构和传感器单元均与控制单元通信连接;传感器单元用于实时检测机械传动机构上的运行状态数据,并将检测到的运行状态数据发送至控制单元;控制单元用于根据运行状态数据生成相应的控制指令;液压安全转向机构能够接收控制单元的控制指令并能够在判断汽车发生爆胎时启动并阻断轮胎摩擦力传递至机械传动机构。本发明提供