
一种自动驾驶转向装置.pdf

贤惠****66

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种自动驾驶转向装置.pdf
一种自动驾驶转向装置,包括套件、转向杆、第一传动元件、第二传动元件,其中第一传动元件安装固定在转向杆上并在套件内部,套件与车架内部之间是相通的,驱动装置、第二传动元件所在轴在其中,驱动装置轴与位于车架内的第二传动元件所在轴有耦合连接和分离切断两种状态。本发明结构紧凑、拆装方便,在车体内部实现驱动装置带动转向杆实现全向转向的结构,丝杆装置带动驱动装置或拨叉带动旋转件移动时达到无阻力的手动转向模式。外接控制系统可实现自行车、电动车、摩托车、两轮车模型、三轮车等交通工具的自动驾驶。

一种自动驾驶转向装置.pdf
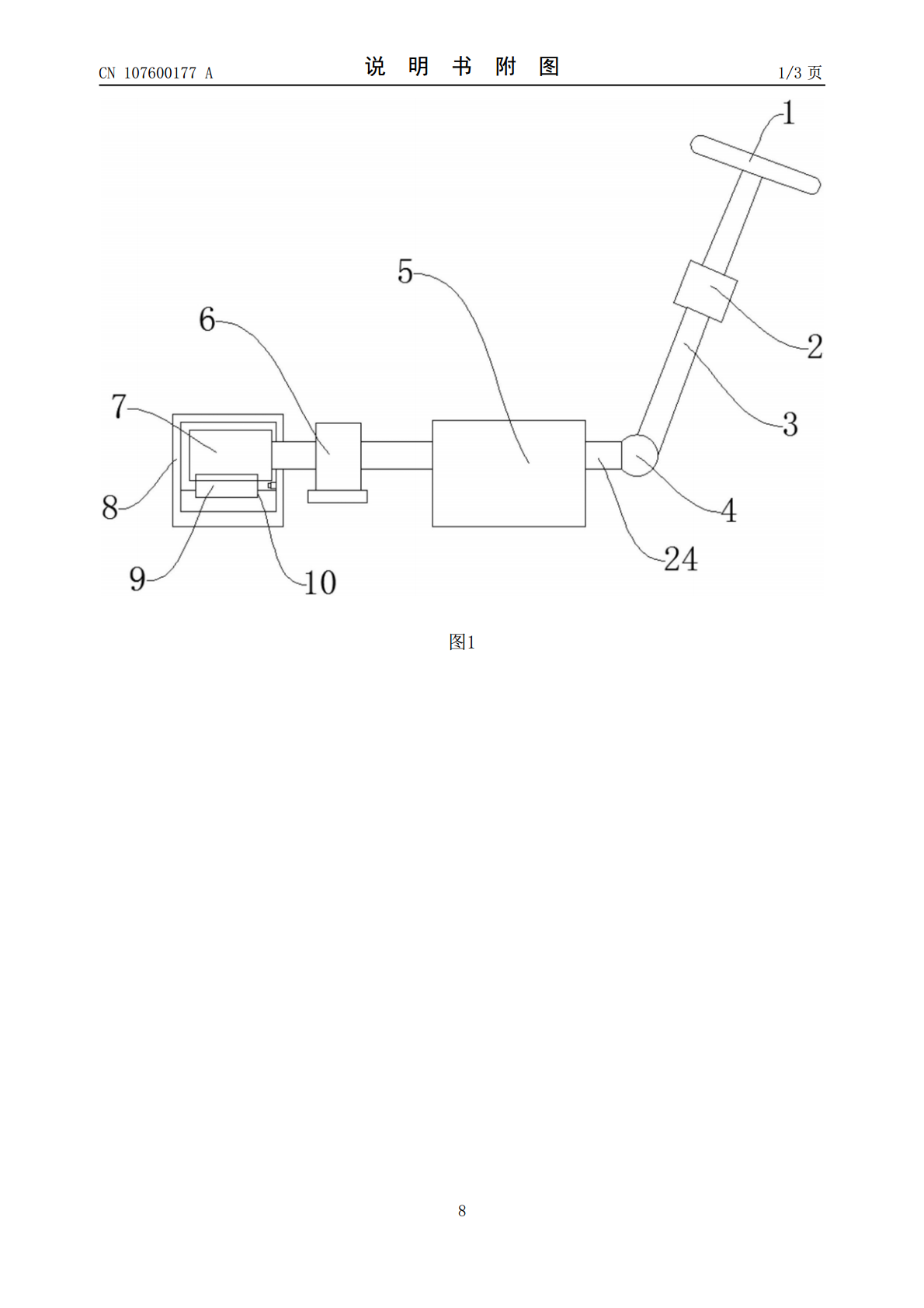
本发明公开了一种自动驾驶转向装置,包括减速器、齿条,所述减速器两侧各设置有一根动力输出轴,其中一根所述动力输出轴端部设置有球头座,所述球头座内设置有传动杆,所述传动杆上方设置有方向盘,所述传动杆中部设置有扭矩传感器,另一根所述动力输出轴端部设置有齿轮,所述齿轮下方设置有所述齿条,所述齿条外部设置有防护箱,所述防护箱内底部设置有滑槽,所述滑槽内设置有滚珠,所述防护箱内侧壁上设置有红外位移检测器。有益效果在于:可以降低所述齿条移动时的摩擦力,使得传动精准度更高,延长所述齿条的使用寿命,而且可以从多方位对汽车转

一种转向装置、转向系统及自动驾驶车.pdf
本发明涉及一种转向装置,包含:一支架;一第一输入构件,以相对所述支架能够转动地支撑于支架上,包含一沿第一方向延展的第一输入轴、以及一能够与第一输入轴同步转动的第一转向部;及一第一输出构件,包含啮合于第一转向部的第二转向部、以及一与第二转向部能够同步转动的第一输出轴;所述转向装置包含一以相对所述支架能够转动的方式支撑于支架上的第二输入构件,所述第二输入构件包含有一联接于所述第一输出轴的第二输入轴;所述第一输出轴构成为能够将所述第一输入轴或所述第二输入轴的转动从第二方向上输出。本发明另提供一种转向系统和自动驾
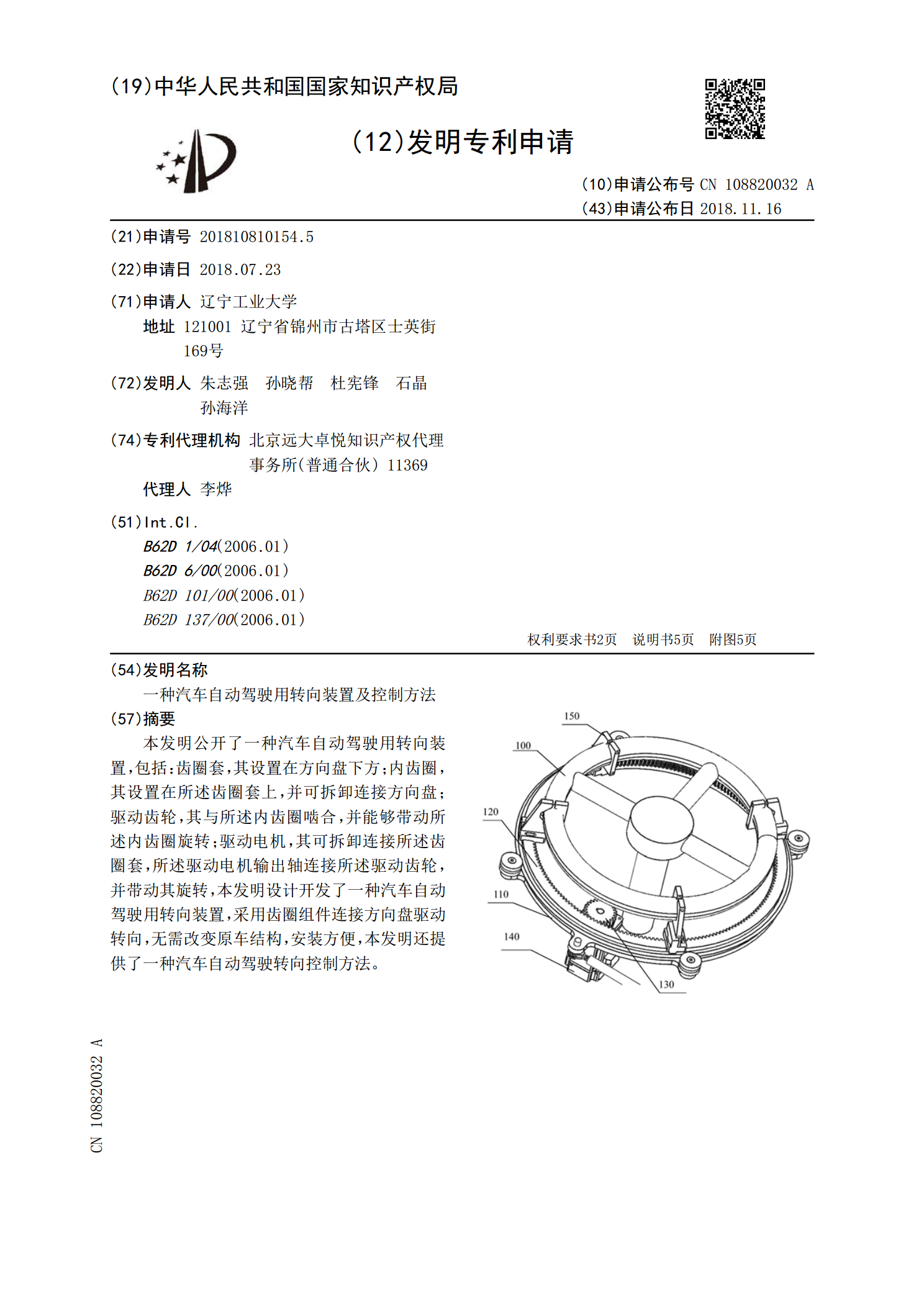
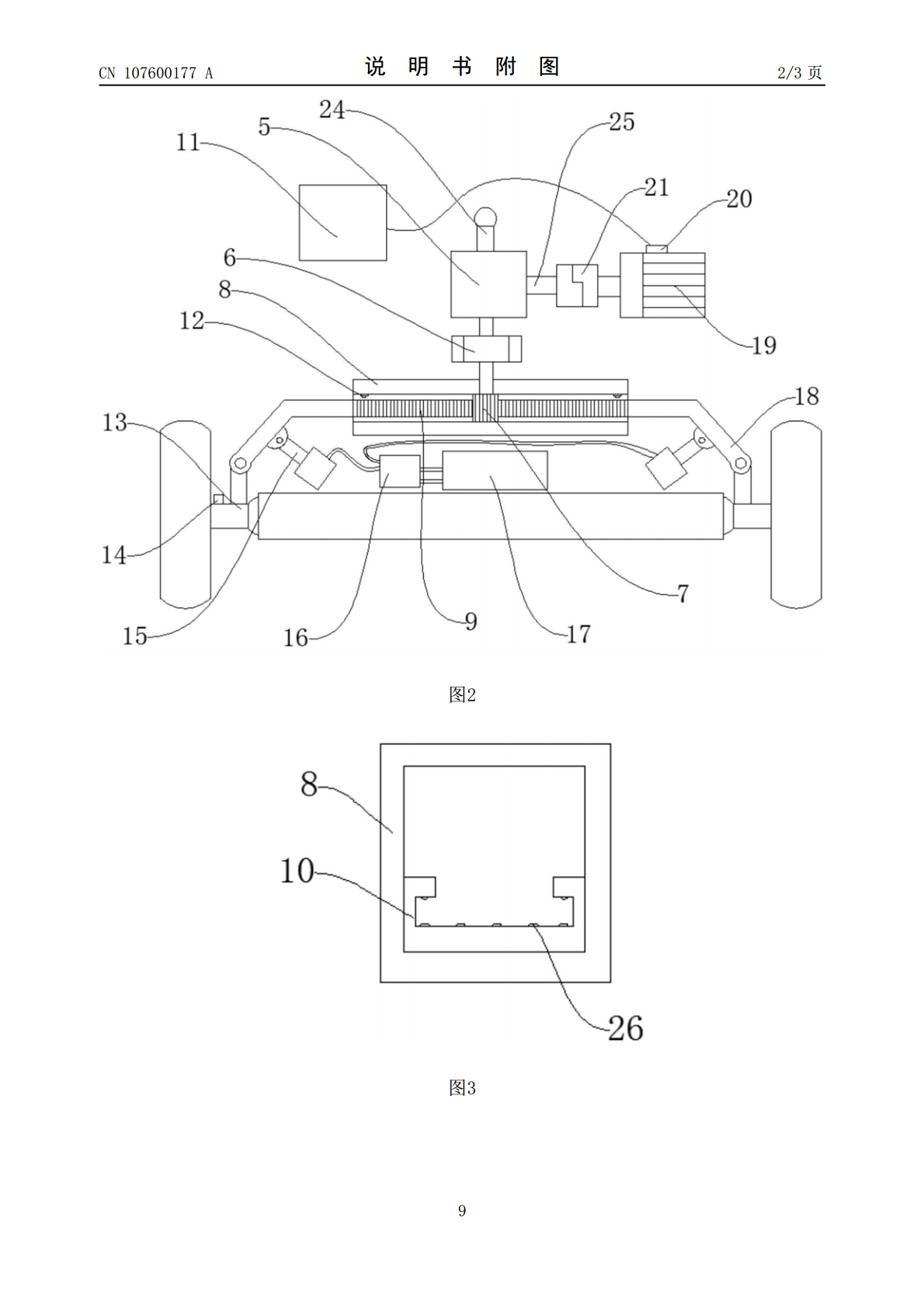
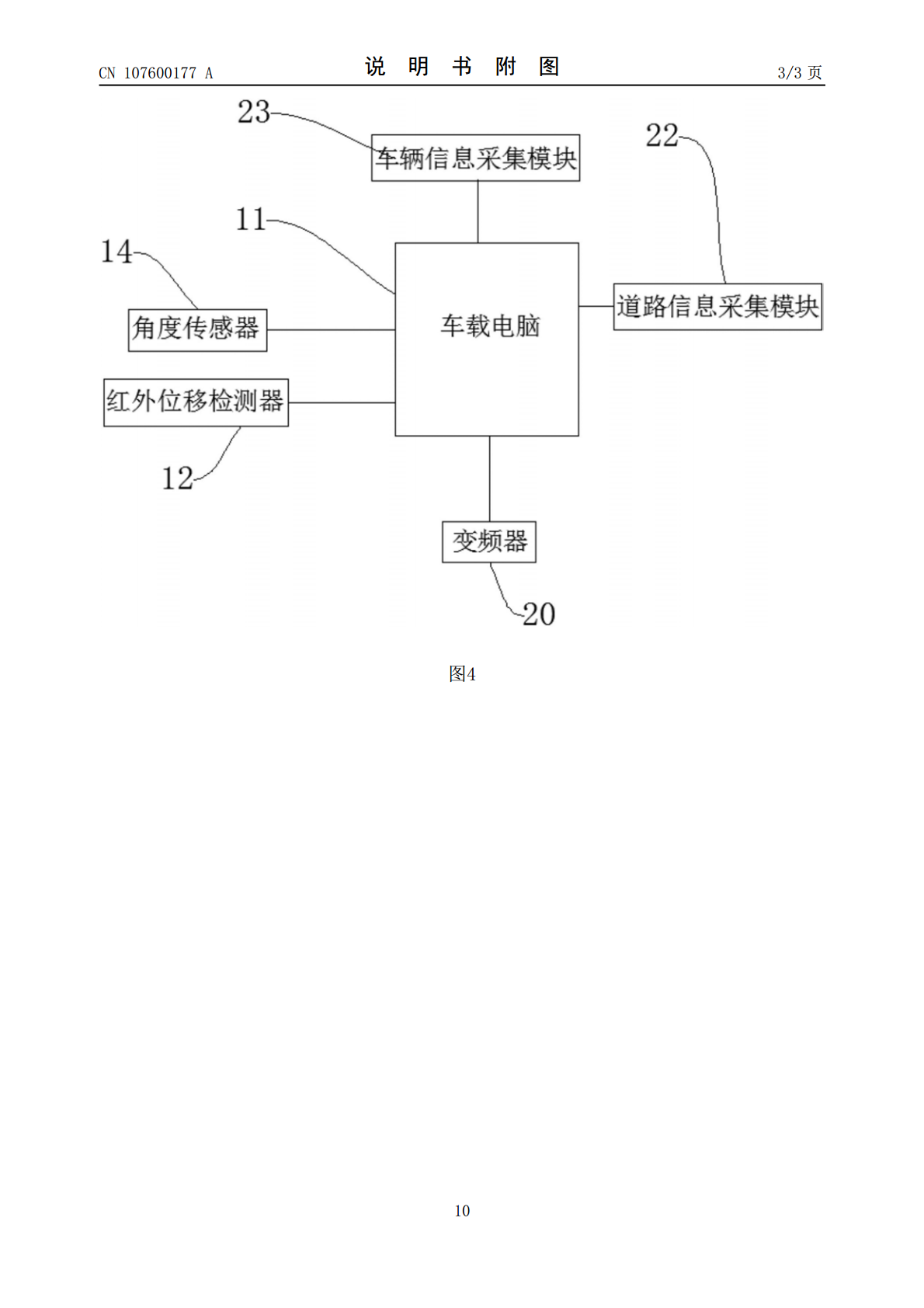
一种汽车自动驾驶用转向装置及控制方法.pdf
本发明公开了一种汽车自动驾驶用转向装置,包括:齿圈套,其设置在方向盘下方;内齿圈,其设置在所述齿圈套上,并可拆卸连接方向盘;驱动齿轮,其与所述内齿圈啮合,并能够带动所述内齿圈旋转;驱动电机,其可拆卸连接所述齿圈套,所述驱动电机输出轴连接所述驱动齿轮,并带动其旋转,本发明设计开发了一种汽车自动驾驶用转向装置,采用齿圈组件连接方向盘驱动转向,无需改变原车结构,安装方便,本发明还提供了一种汽车自动驾驶转向控制方法。
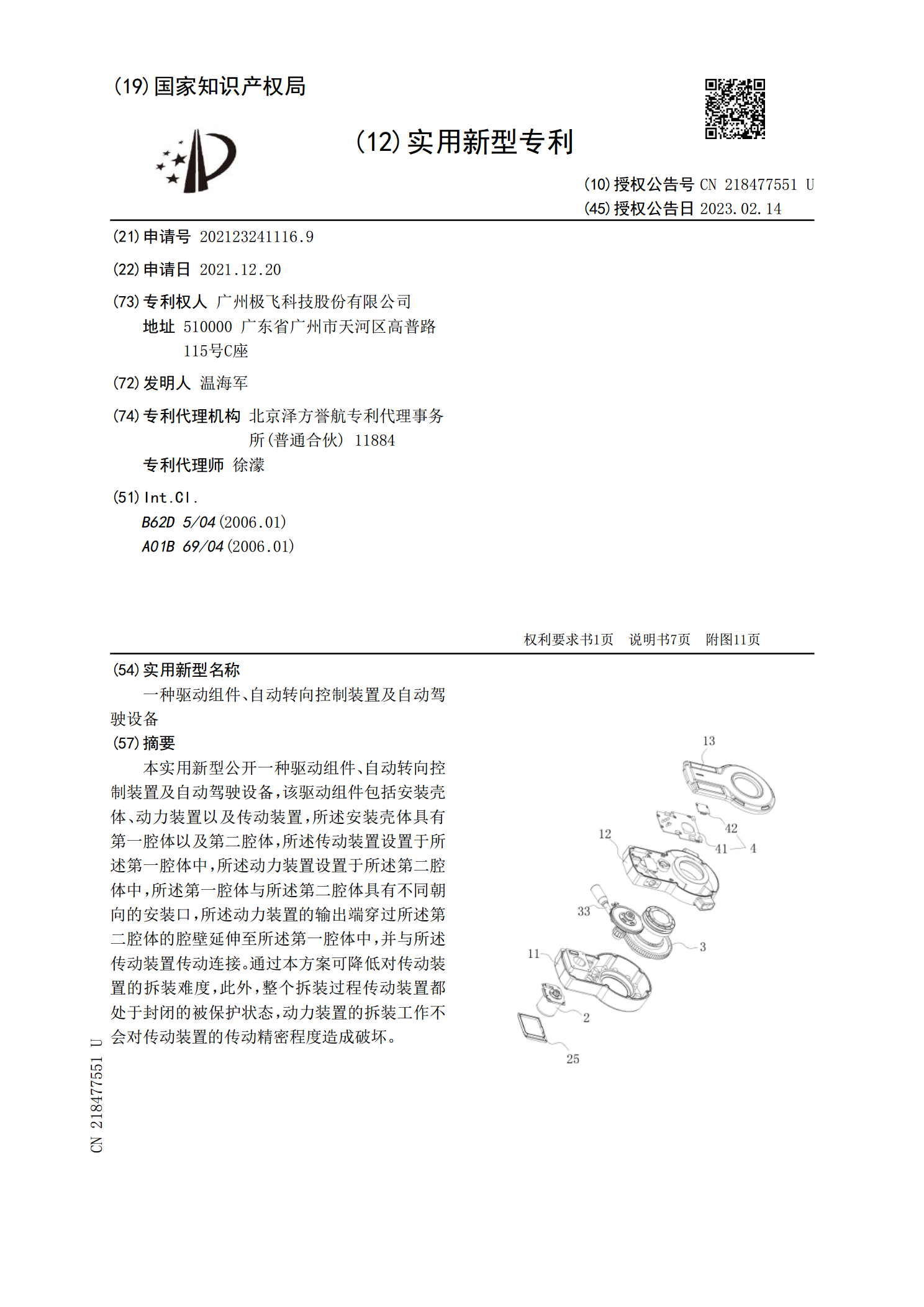
一种驱动组件、自动转向控制装置及自动驾驶设备.pdf
本实用新型公开一种驱动组件、自动转向控制装置及自动驾驶设备,该驱动组件包括安装壳体、动力装置以及传动装置,所述安装壳体具有第一腔体以及第二腔体,所述传动装置设置于所述第一腔体中,所述动力装置设置于所述第二腔体中,所述第一腔体与所述第二腔体具有不同朝向的安装口,所述动力装置的输出端穿过所述第二腔体的腔壁延伸至所述第一腔体中,并与所述传动装置传动连接。通过本方案可降低对传动装置的拆装难度,此外,整个拆装过程传动装置都处于封闭的被保护状态,动力装置的拆装工作不会对传动装置的传动精密程度造成破坏。