
人机交互协作机器人柔性驱动关节及其控制方法.pdf

景福****90

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

人机交互协作机器人柔性驱动关节及其控制方法.pdf
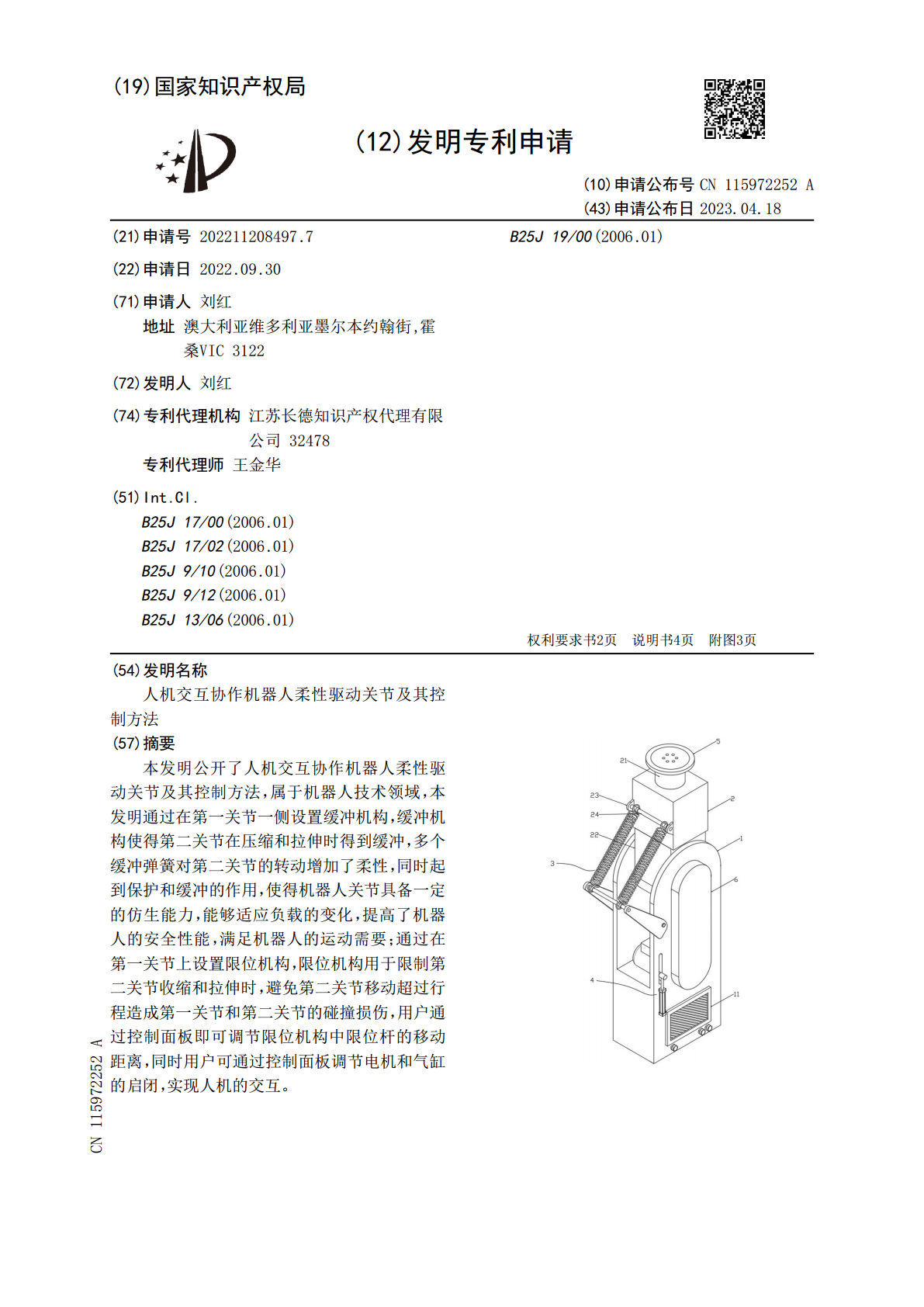
本发明公开了人机交互协作机器人柔性驱动关节及其控制方法,属于机器人技术领域,本发明通过在第一关节一侧设置缓冲机构,缓冲机构使得第二关节在压缩和拉伸时得到缓冲,多个缓冲弹簧对第二关节的转动增加了柔性,同时起到保护和缓冲的作用,使得机器人关节具备一定的仿生能力,能够适应负载的变化,提高了机器人的安全性能,满足机器人的运动需要;通过在第一关节上设置限位机构,限位机构用于限制第二关节收缩和拉伸时,避免第二关节移动超过行程造成第一关节和第二关节的碰撞损伤,用户通过控制面板即可调节限位机构中限位杆的移动距离,同时用户

机器人及其关节驱动装置.pdf
本发明公开了一种机器人及其关节驱动装置,机器人关节的驱动装置包括:关节驱动轮和联动齿轮;与所述关节驱动轮和联动齿轮均啮合的同步齿带,所述同步齿带的两端之间依次串接有第一弹性件和第二弹性件;调节部件,其能够调节所述第一弹性件和/或第二弹性件的长度。由于通过调节部件改变第一弹性件和/或第二弹性件的长度,进而改变了第一弹性件和第二弹性件共同形成的弹性组件的刚度,实现了机器人关机刚度的改变,使关节的驱动装置的刚度范围大大增加,能够适用于多种环境,大大提高了柔性关节的通用性。
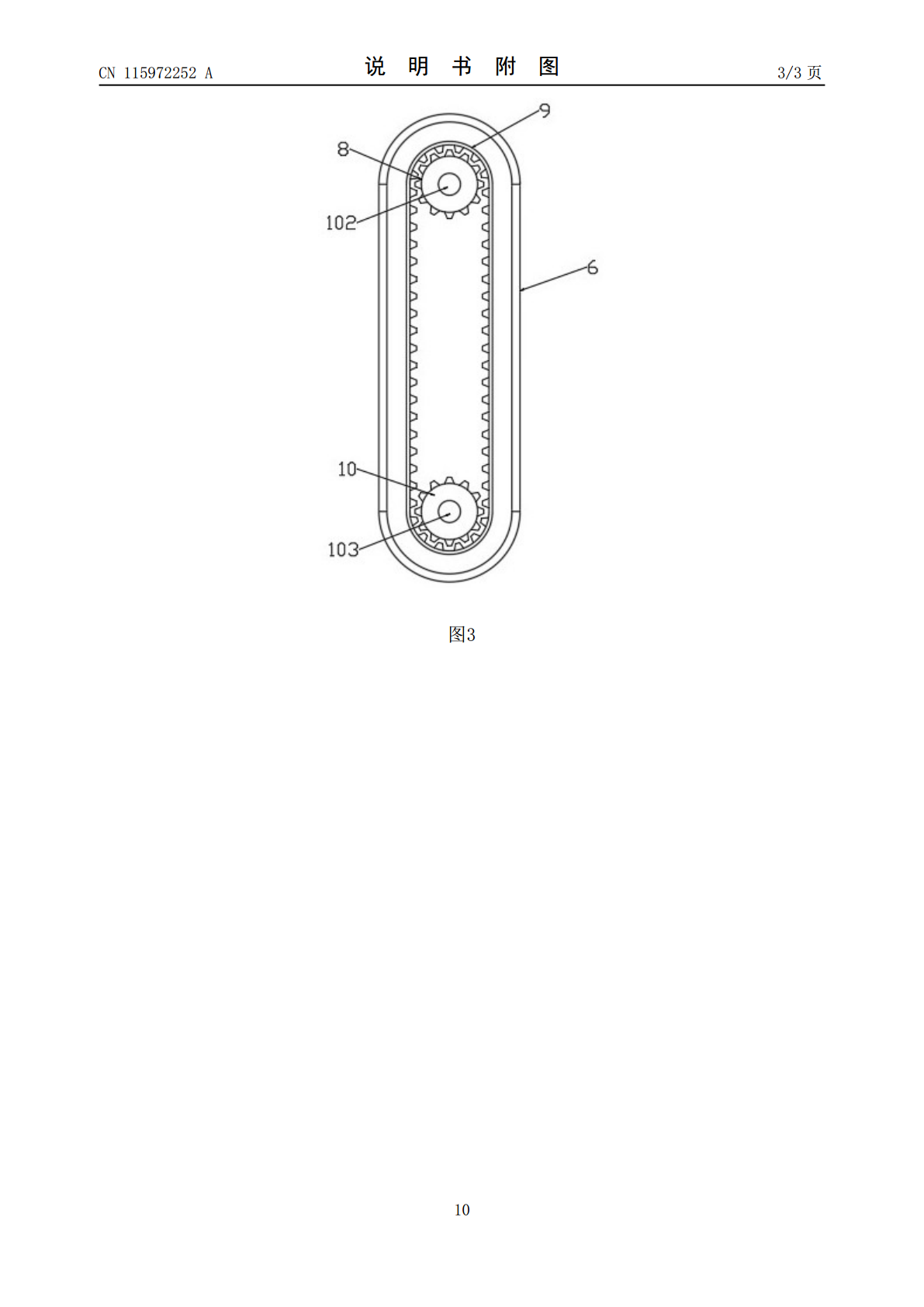
欠驱动并联自对齐踝关节康复机器人及其控制方法.pdf
本发明提供一种欠驱动并联自对齐踝关节康复机器人,其包括定平台、动平台、第一支链、第二支链和第三支链,第一支链、第二支链和第三支链为结构相同的主动自由度和被动自由度解耦并联机构,并联机构为3‑RPPPRR并联机构。其通过三个驱动电机控制第一转动副,从而获得三个转动自由度,通过人体踝关节自主控制,从而获得第三个移动自由度,实现了欠驱动特性;且第四连接件和第五连接件的第五转动副轴线与连接第五连接件和动平台的第六转动副轴线与动平台的轴线交于一点,使该点与脚踝中心重合,实现人机轴线自对齐,解决了人机闭链的欠自由度所

双足仿人机器人新型柔性关节及其驱动的设计研究综述报告.docx
双足仿人机器人新型柔性关节及其驱动的设计研究综述报告摘要:随着现代机器人技术的不断发展,双足仿人机器人作为一种具有较高成本效益的机器人体系,在国内外受到了广泛关注。而柔性关节技术在双足仿人机器人中的应用则成为了研究的热点之一,本文就双足仿人机器人新型柔性关节及其驱动的设计进行综述,主要包括柔性关节的分类及特点,柔性关节的设计参数,柔性关节的最优化设计及最优化方法,以及柔性关节驱动的技术现状与发展方向等。本文将有助于帮助读者了解双足仿人机器人柔性关节相关的技术及其应用,为双足仿人机器人的进一步研究提供重要的
柔性外骨骼机器人及其柔性分体驱动包.pdf
本发明公开了一种柔性外骨骼机器人及其柔性分体驱动包。柔性分体驱动包包括驱动机构和绕线快拆机构。驱动机构包括集成设置的第一壳体组件、动力元件、绕线驱动组件以及检测组件,动力元件设置在第一壳体组件的外部,绕线驱动组件包括驱动轴,驱动轴设置在动力元件的驱动下转动,驱动轴的第一端伸出于第一壳体组件的外部,检测组件用于检测驱动轴的旋转角度;绕线快拆机构包括集成设置的第二壳体组件、绕线轮以及拉线,拉线设在绕线轮上并从第二安装空间伸出于第二壳体组件的外部,绕线轮上设置有安装孔,绕线轮通过安装孔与驱动轴可拆卸地连接。本发