
一种基于车载单目聚焦序列图像构建对象三维轮廓的方法.pdf

猫巷****奕声

1/9

2/9
3/9
4/9
5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于车载单目聚焦序列图像构建对象三维轮廓的方法.pdf
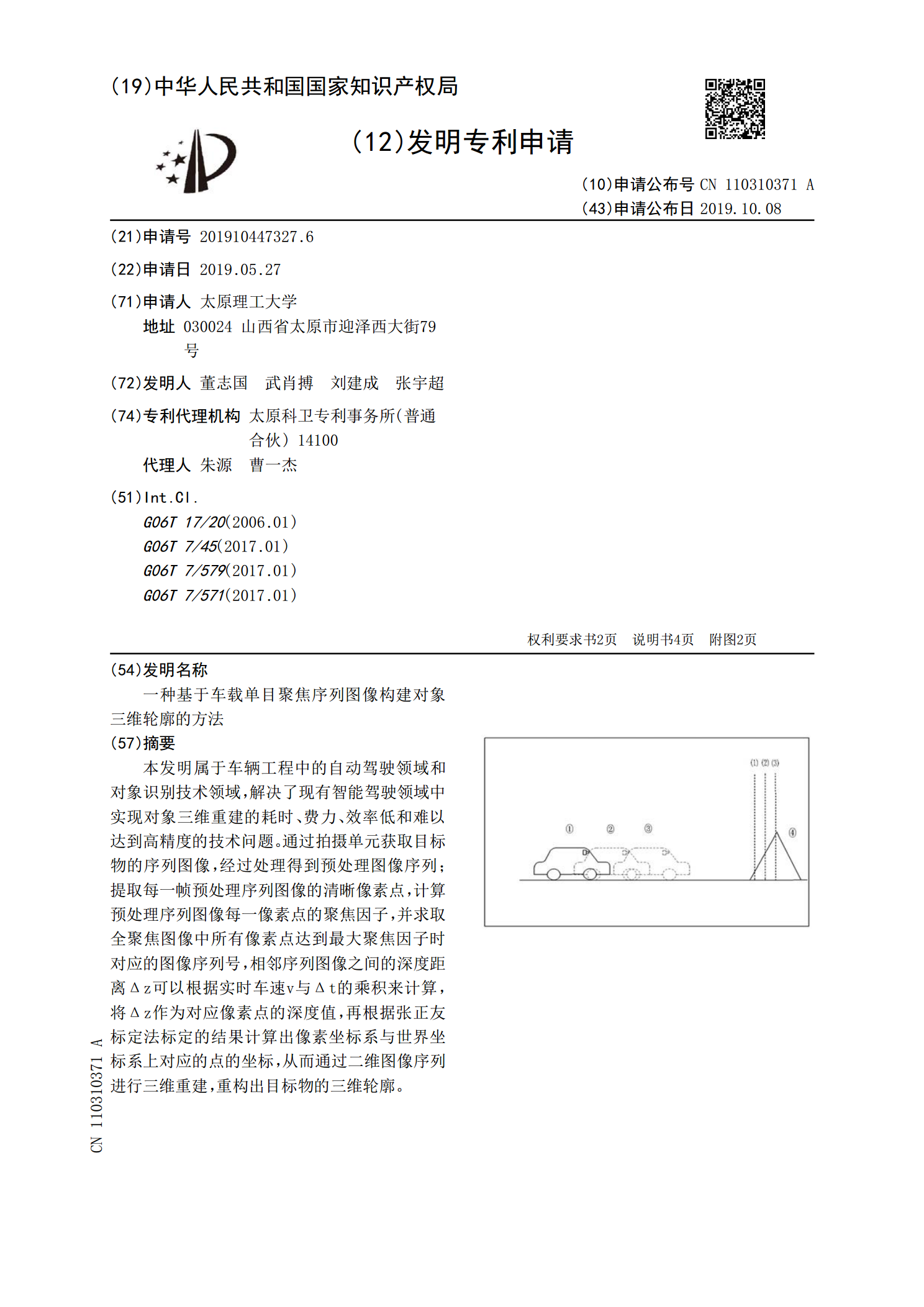
本发明属于车辆工程中的自动驾驶领域和对象识别技术领域,解决了现有智能驾驶领域中实现对象三维重建的耗时、费力、效率低和难以达到高精度的技术问题。通过拍摄单元获取目标物的序列图像,经过处理得到预处理图像序列;提取每一帧预处理序列图像的清晰像素点,计算预处理序列图像每一像素点的聚焦因子,并求取全聚焦图像中所有像素点达到最大聚焦因子时对应的图像序列号,相邻序列图像之间的深度距离Δz可以根据实时车速v与Δt的乘积来计算,将Δz作为对应像素点的深度值,再根据张正友标定法标定的结果计算出像素坐标系与世界坐标系上对应的点
基于单目图像生成三维对象模型的方法.pdf
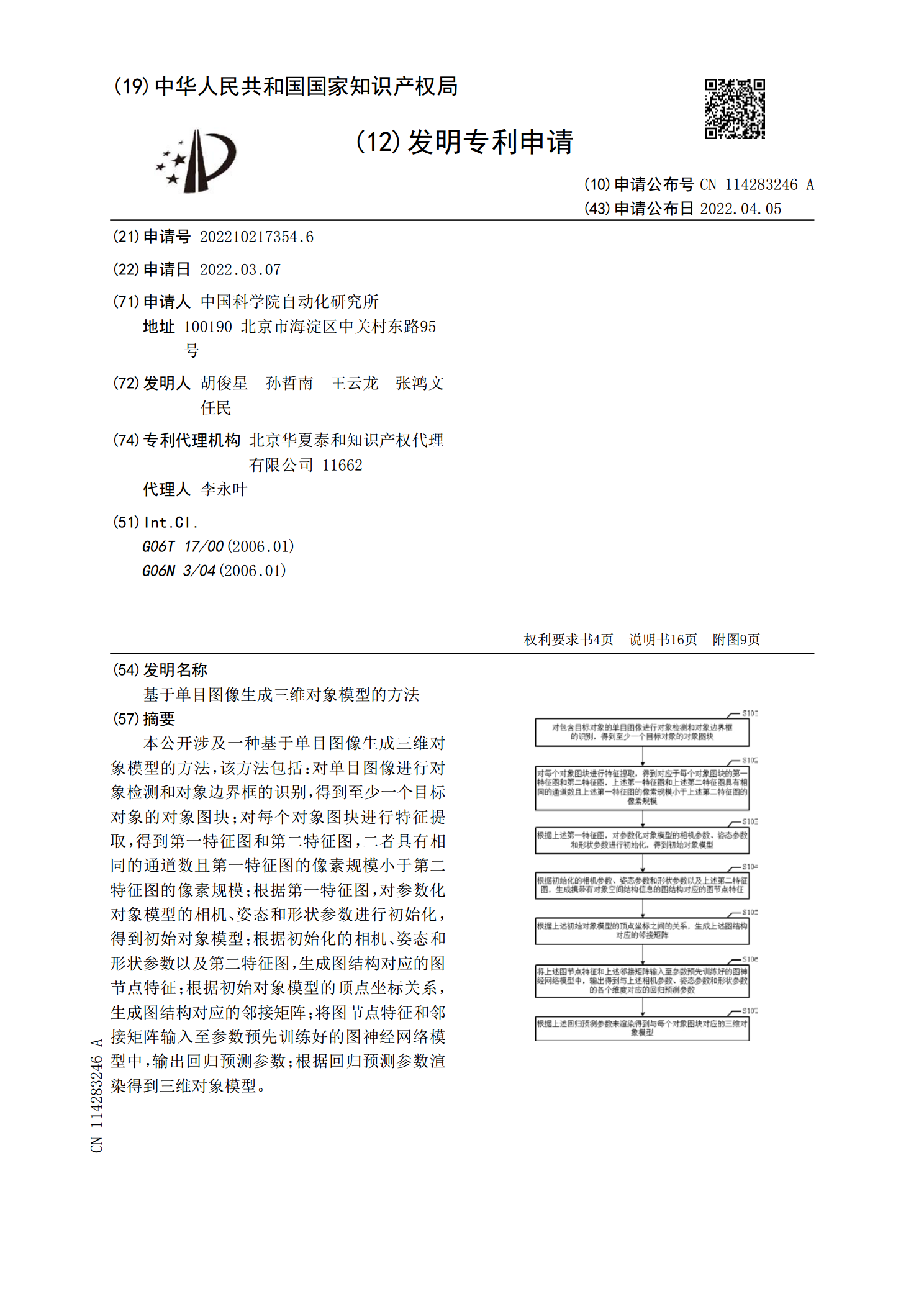
本公开涉及一种基于单目图像生成三维对象模型的方法,该方法包括:对单目图像进行对象检测和对象边界框的识别,得到至少一个目标对象的对象图块;对每个对象图块进行特征提取,得到第一特征图和第二特征图,二者具有相同的通道数且第一特征图的像素规模小于第二特征图的像素规模;根据第一特征图,对参数化对象模型的相机、姿态和形状参数进行初始化,得到初始对象模型;根据初始化的相机、姿态和形状参数以及第二特征图,生成图结构对应的图节点特征;根据初始对象模型的顶点坐标关系,生成图结构对应的邻接矩阵;将图节点特征和邻接矩阵输入至参数

基于单目图像序列的铸件三维重建方法.pptx
汇报人:/目录0102铸件三维重建的意义单目图像序列重建方法简介方法的适用范围03图像采集图像去噪图像增强图像分割04特征点检测算法特征点匹配算法特征点匹配优化05三维重建基本原理基于单目图像序列的三维重建算法流程三维重建结果优化06实验数据与实验环境实验结果展示结果分析方法优缺点分析07研究结论研究展望汇报人:
一种基于单目数字图像的轮廓提取方法.pdf
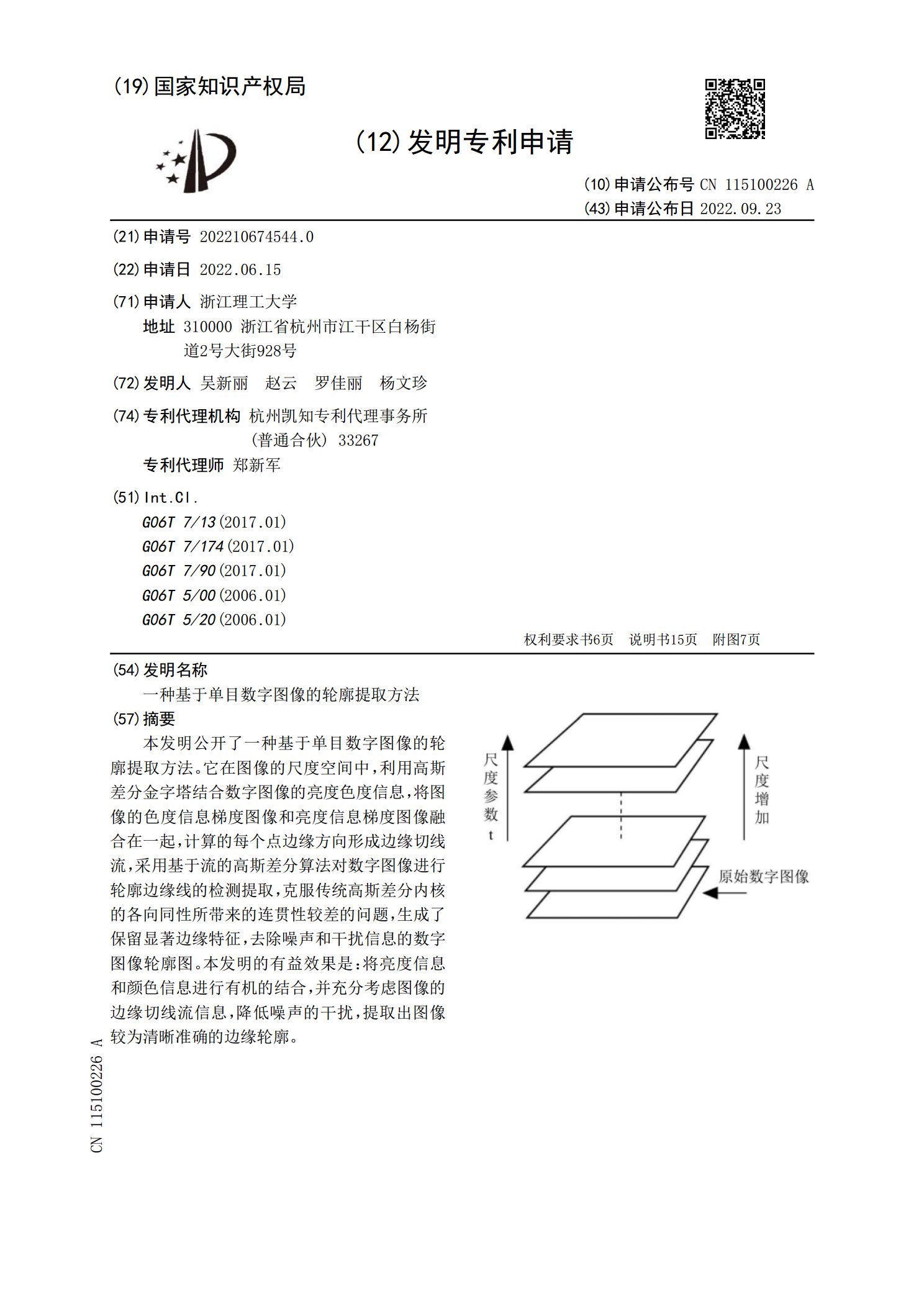
本发明公开了一种基于单目数字图像的轮廓提取方法。它在图像的尺度空间中,利用高斯差分金字塔结合数字图像的亮度色度信息,将图像的色度信息梯度图像和亮度信息梯度图像融合在一起,计算的每个点边缘方向形成边缘切线流,采用基于流的高斯差分算法对数字图像进行轮廓边缘线的检测提取,克服传统高斯差分内核的各向同性所带来的连贯性较差的问题,生成了保留显著边缘特征,去除噪声和干扰信息的数字图像轮廓图。本发明的有益效果是:将亮度信息和颜色信息进行有机的结合,并充分考虑图像的边缘切线流信息,降低噪声的干扰,提取出图像较为清晰准确的

基于轮廓锐度的单目图像深度信息估计方法.pdf
本发明提出一种基于轮廓锐度的单目图像深度信息估计方法,该方法应用边缘轮廓锐度作为模糊信息估计特征、通过低层次线索信息进行深度信息提取。首先对图像进行边缘检测;接着对图像中的边缘计算边缘能量、轮廓锐度,并以边缘能量、轮廓锐度作为轮廓的外部能量,结合轮廓的内部能量—轮廓线特征性能量和轮廓线距离能量建立轮廓跟踪模型,求解能量函数的最小值,搜索图像轮廓;然后以深度梯度假设作为先验假设梯度模型,对具有不同的轮廓线的区域进行深度值填充,计算得出深度分布;最后利用原图像信息和所得深度图像信息对得到的深度图像进行优化处理