
基于轮廓锐度的单目图像深度信息估计方法.pdf

是丹****ni


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于轮廓锐度的单目图像深度信息估计方法.pdf
本发明提出一种基于轮廓锐度的单目图像深度信息估计方法,该方法应用边缘轮廓锐度作为模糊信息估计特征、通过低层次线索信息进行深度信息提取。首先对图像进行边缘检测;接着对图像中的边缘计算边缘能量、轮廓锐度,并以边缘能量、轮廓锐度作为轮廓的外部能量,结合轮廓的内部能量—轮廓线特征性能量和轮廓线距离能量建立轮廓跟踪模型,求解能量函数的最小值,搜索图像轮廓;然后以深度梯度假设作为先验假设梯度模型,对具有不同的轮廓线的区域进行深度值填充,计算得出深度分布;最后利用原图像信息和所得深度图像信息对得到的深度图像进行优化处理
一种基于单目数字图像的轮廓提取方法.pdf
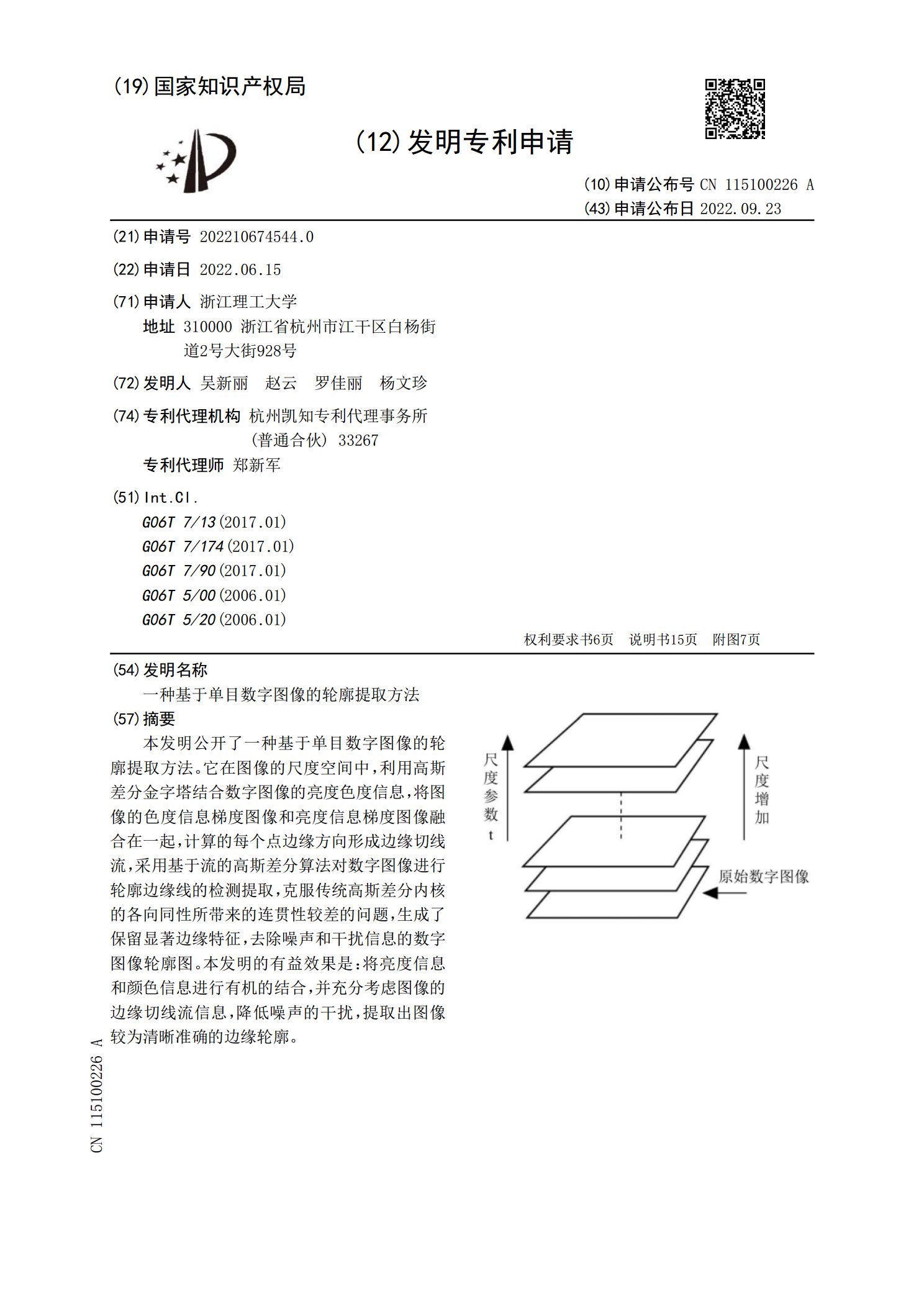
本发明公开了一种基于单目数字图像的轮廓提取方法。它在图像的尺度空间中,利用高斯差分金字塔结合数字图像的亮度色度信息,将图像的色度信息梯度图像和亮度信息梯度图像融合在一起,计算的每个点边缘方向形成边缘切线流,采用基于流的高斯差分算法对数字图像进行轮廓边缘线的检测提取,克服传统高斯差分内核的各向同性所带来的连贯性较差的问题,生成了保留显著边缘特征,去除噪声和干扰信息的数字图像轮廓图。本发明的有益效果是:将亮度信息和颜色信息进行有机的结合,并充分考虑图像的边缘切线流信息,降低噪声的干扰,提取出图像较为清晰准确的
基于轮廓相似度的图像比较方法.pdf
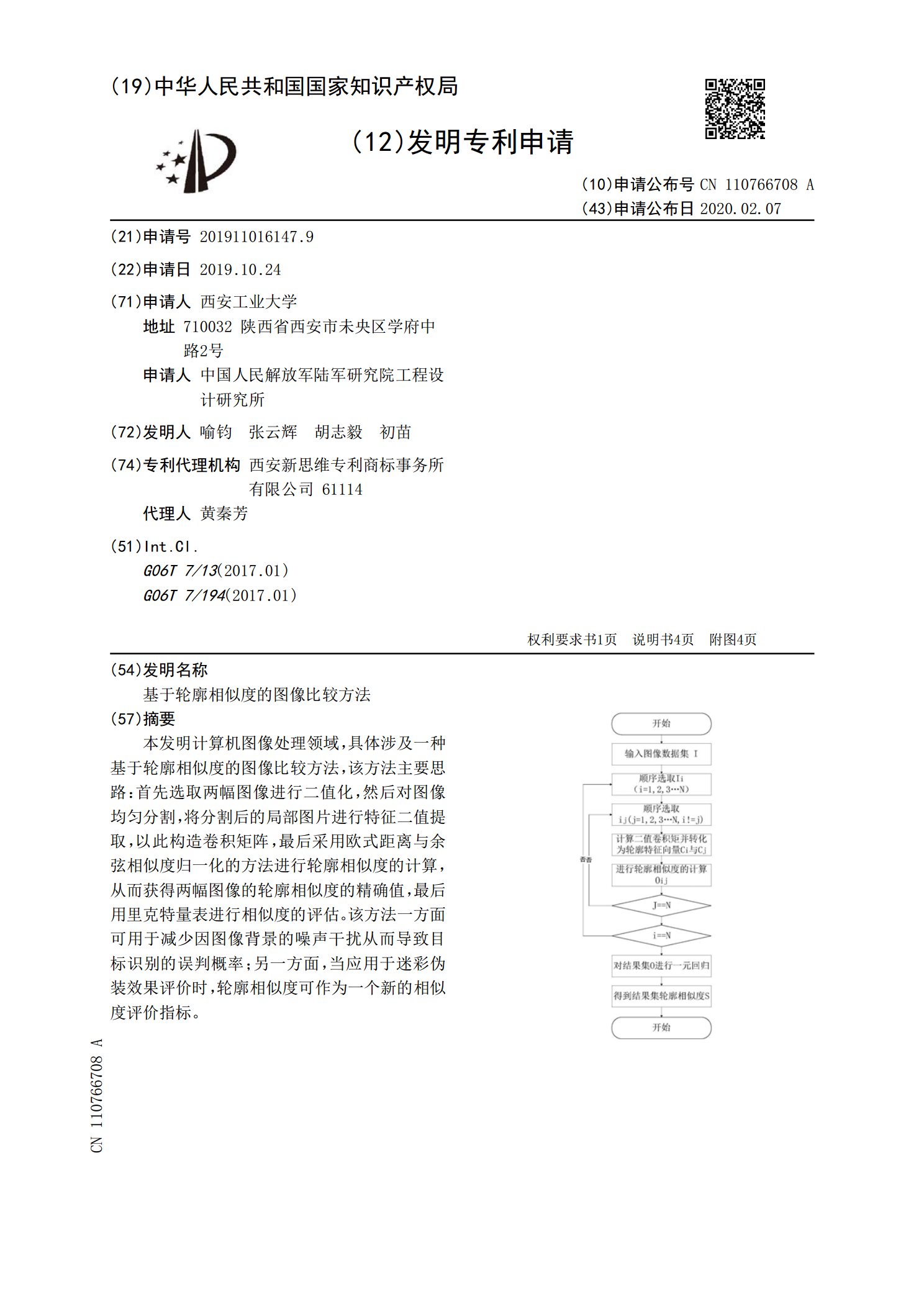
本发明计算机图像处理领域,具体涉及一种基于轮廓相似度的图像比较方法,该方法主要思路:首先选取两幅图像进行二值化,然后对图像均匀分割,将分割后的局部图片进行特征二值提取,以此构造卷积矩阵,最后采用欧式距离与余弦相似度归一化的方法进行轮廓相似度的计算,从而获得两幅图像的轮廓相似度的精确值,最后用里克特量表进行相似度的评估。该方法一方面可用于减少因图像背景的噪声干扰从而导致目标识别的误判概率;另一方面,当应用于迷彩伪装效果评价时,轮廓相似度可作为一个新的相似度评价指标。
基于深度卷积神经网络的图像轮廓检测方法.pdf
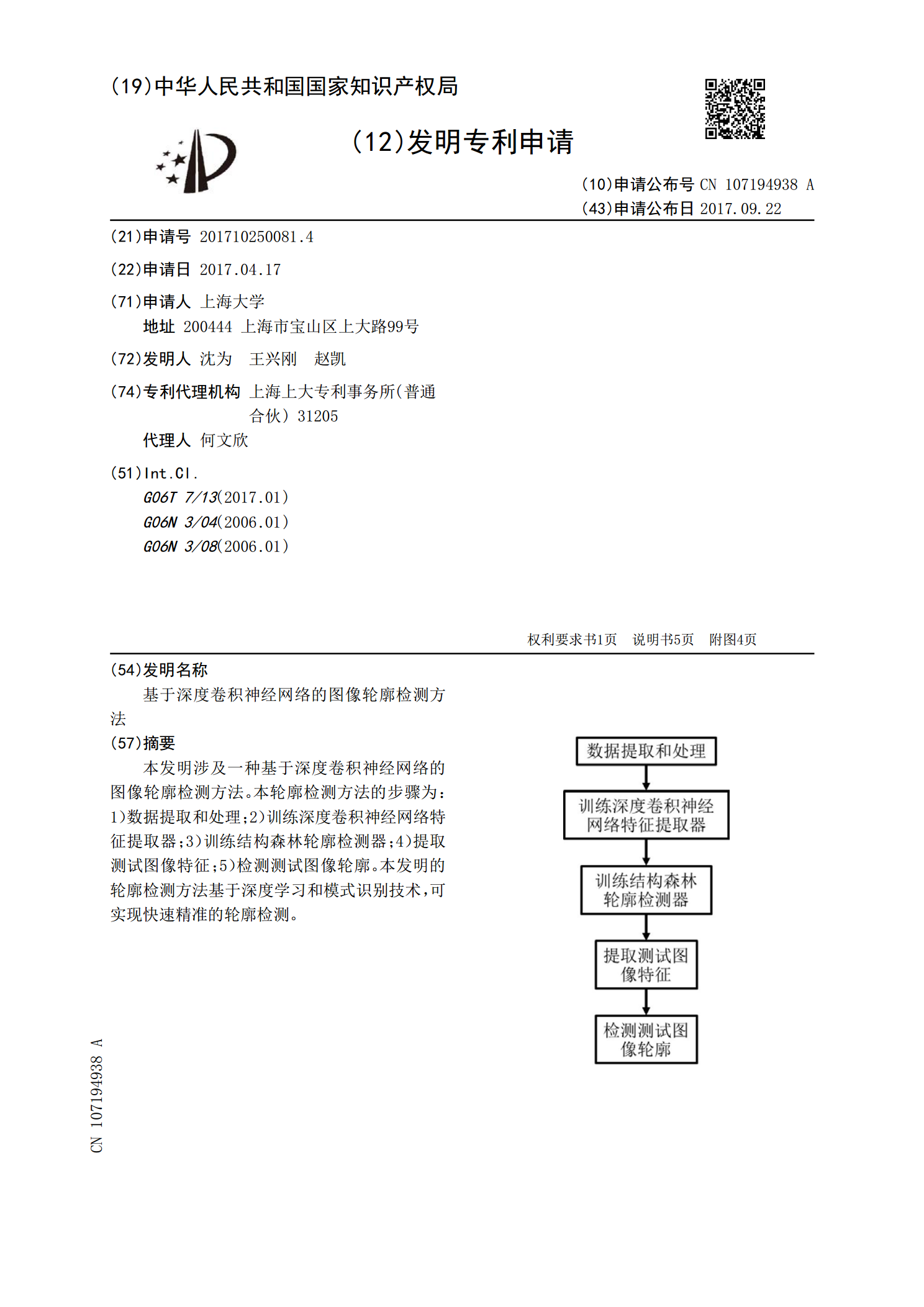
本发明涉及一种基于深度卷积神经网络的图像轮廓检测方法。本轮廓检测方法的步骤为:1)数据提取和处理;2)训练深度卷积神经网络特征提取器;3)训练结构森林轮廓检测器;4)提取测试图像特征;5)检测测试图像轮廓。本发明的轮廓检测方法基于深度学习和模式识别技术,可实现快速精准的轮廓检测。

一种单目图像深度估计方法与系统.pdf
本发明涉及单目图像深度估计方法和系统,包括:构建仅具有特征摄取部分的CNN模型架构,作为特征摄取架构;按所需深度图的分辨率设置多个全连接层;将全连接层连接至特征摄取架构,组成初级估计网络模型;使用训练数据集训练初级估计网络模型,并提取初级估计网络模型各层的特征图;计算特征图和其相应深度图的平均相对局部几何结构误差,并根据平均相对局部几何结构误差生成最终估计模型;使用训练数据集并结合损失函数对最终估计模型进行训练,并用训练完成后的最终估计模型对输入图像进行深度预测。本发明根据平均相对局部几何结构误差并基于损