
基于单目图像生成三维对象模型的方法.pdf

慧红****ad

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共30页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于单目图像生成三维对象模型的方法.pdf
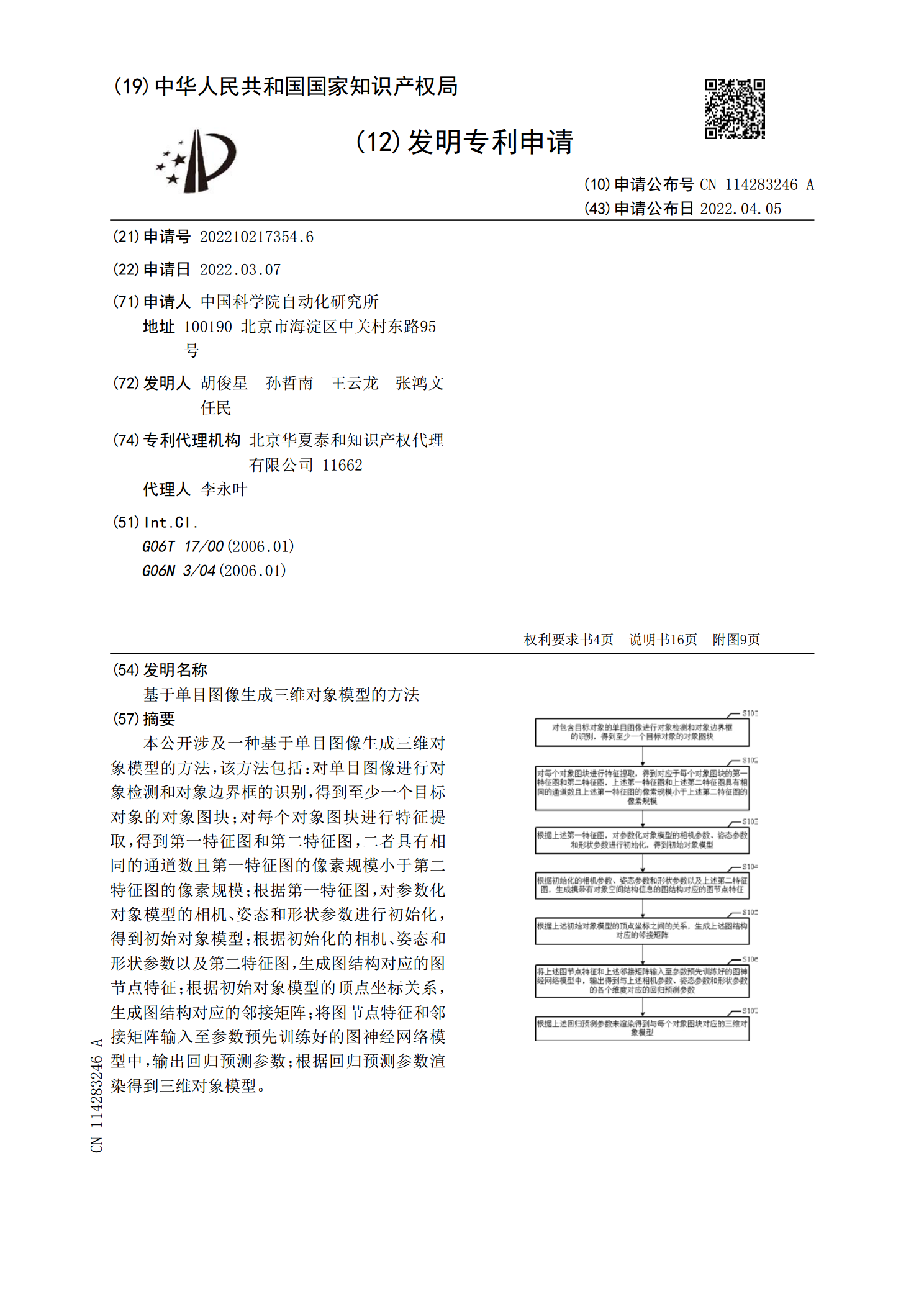
本公开涉及一种基于单目图像生成三维对象模型的方法,该方法包括:对单目图像进行对象检测和对象边界框的识别,得到至少一个目标对象的对象图块;对每个对象图块进行特征提取,得到第一特征图和第二特征图,二者具有相同的通道数且第一特征图的像素规模小于第二特征图的像素规模;根据第一特征图,对参数化对象模型的相机、姿态和形状参数进行初始化,得到初始对象模型;根据初始化的相机、姿态和形状参数以及第二特征图,生成图结构对应的图节点特征;根据初始对象模型的顶点坐标关系,生成图结构对应的邻接矩阵;将图节点特征和邻接矩阵输入至参数
一种基于车载单目聚焦序列图像构建对象三维轮廓的方法.pdf
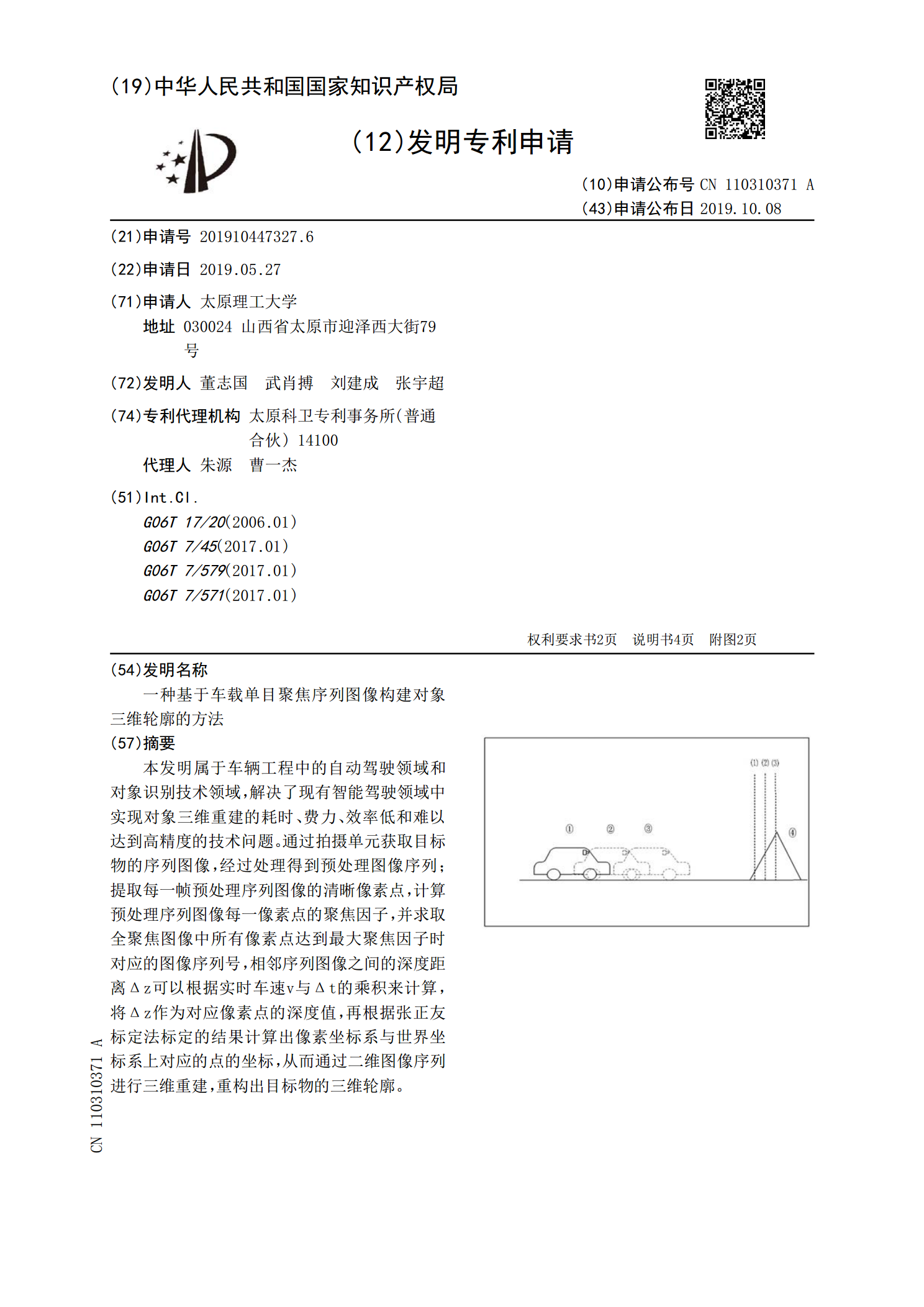
本发明属于车辆工程中的自动驾驶领域和对象识别技术领域,解决了现有智能驾驶领域中实现对象三维重建的耗时、费力、效率低和难以达到高精度的技术问题。通过拍摄单元获取目标物的序列图像,经过处理得到预处理图像序列;提取每一帧预处理序列图像的清晰像素点,计算预处理序列图像每一像素点的聚焦因子,并求取全聚焦图像中所有像素点达到最大聚焦因子时对应的图像序列号,相邻序列图像之间的深度距离Δz可以根据实时车速v与Δt的乘积来计算,将Δz作为对应像素点的深度值,再根据张正友标定法标定的结果计算出像素坐标系与世界坐标系上对应的点
基于单目图像的三维信息的提取方法及电子装置.pdf
本发明公开了一种基于单目图像的三维信息的提取方法,包括:获取第二2D单目图像,所述第二2D单目图像包括目标物体;将所述第二2D单目图像输入到训练后的算法模型中,计算得到所述目标物体的3D信息。采用本发明实施例计算复杂度小,成本低,并且不存在盲区和不受使用场景的影响。

基于单目图像序列的铸件三维重建方法.pptx
汇报人:/目录0102铸件三维重建的意义单目图像序列重建方法简介方法的适用范围03图像采集图像去噪图像增强图像分割04特征点检测算法特征点匹配算法特征点匹配优化05三维重建基本原理基于单目图像序列的三维重建算法流程三维重建结果优化06实验数据与实验环境实验结果展示结果分析方法优缺点分析07研究结论研究展望汇报人:
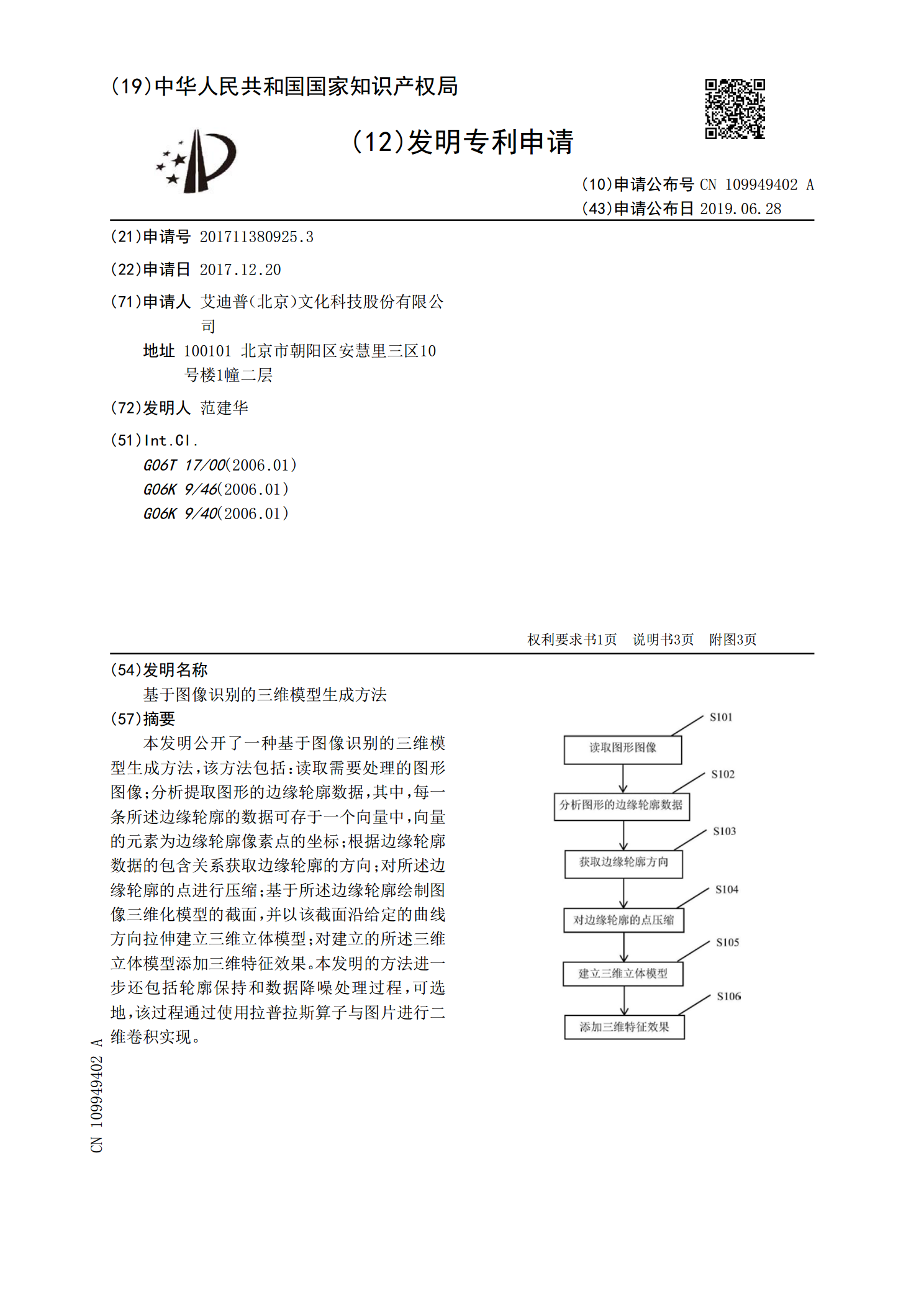
基于图像识别的三维模型生成方法.pdf
本发明公开了一种基于图像识别的三维模型生成方法,该方法包括:读取需要处理的图形图像;分析提取图形的边缘轮廓数据,其中,每一条所述边缘轮廓的数据可存于一个向量中,向量的元素为边缘轮廓像素点的坐标;根据边缘轮廓数据的包含关系获取边缘轮廓的方向;对所述边缘轮廓的点进行压缩;基于所述边缘轮廓绘制图像三维化模型的截面,并以该截面沿给定的曲线方向拉伸建立三维立体模型;对建立的所述三维立体模型添加三维特征效果。本发明的方法进一步还包括轮廓保持和数据降噪处理过程,可选地,该过程通过使用拉普拉斯算子与图片进行二维卷积实现。