
轮-腿复合并联腿机构及水下机器人.pdf

书生****瑞梦

1/10
2/10
3/10
4/10

5/10

6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
轮-腿复合并联腿机构及水下机器人.pdf
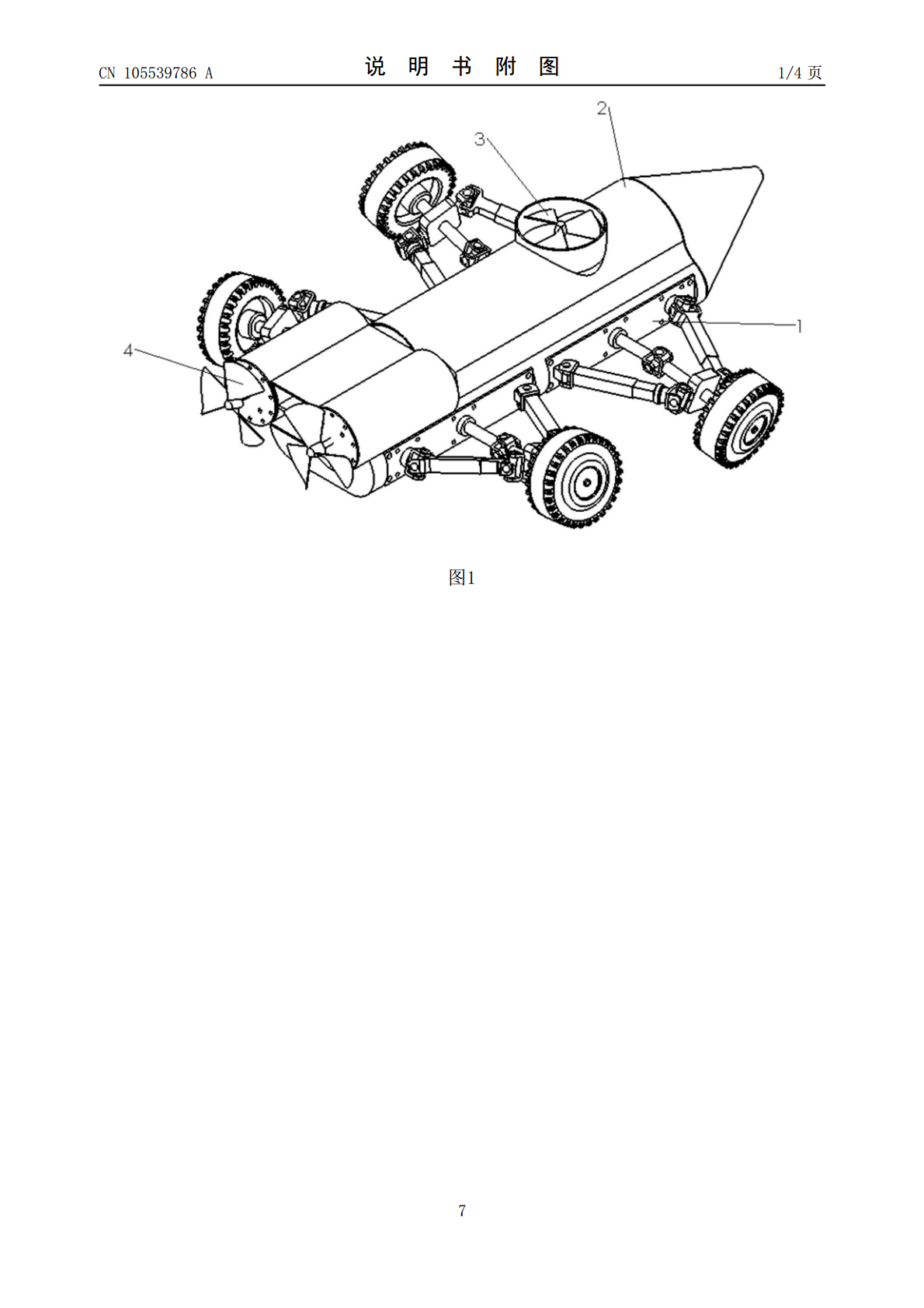
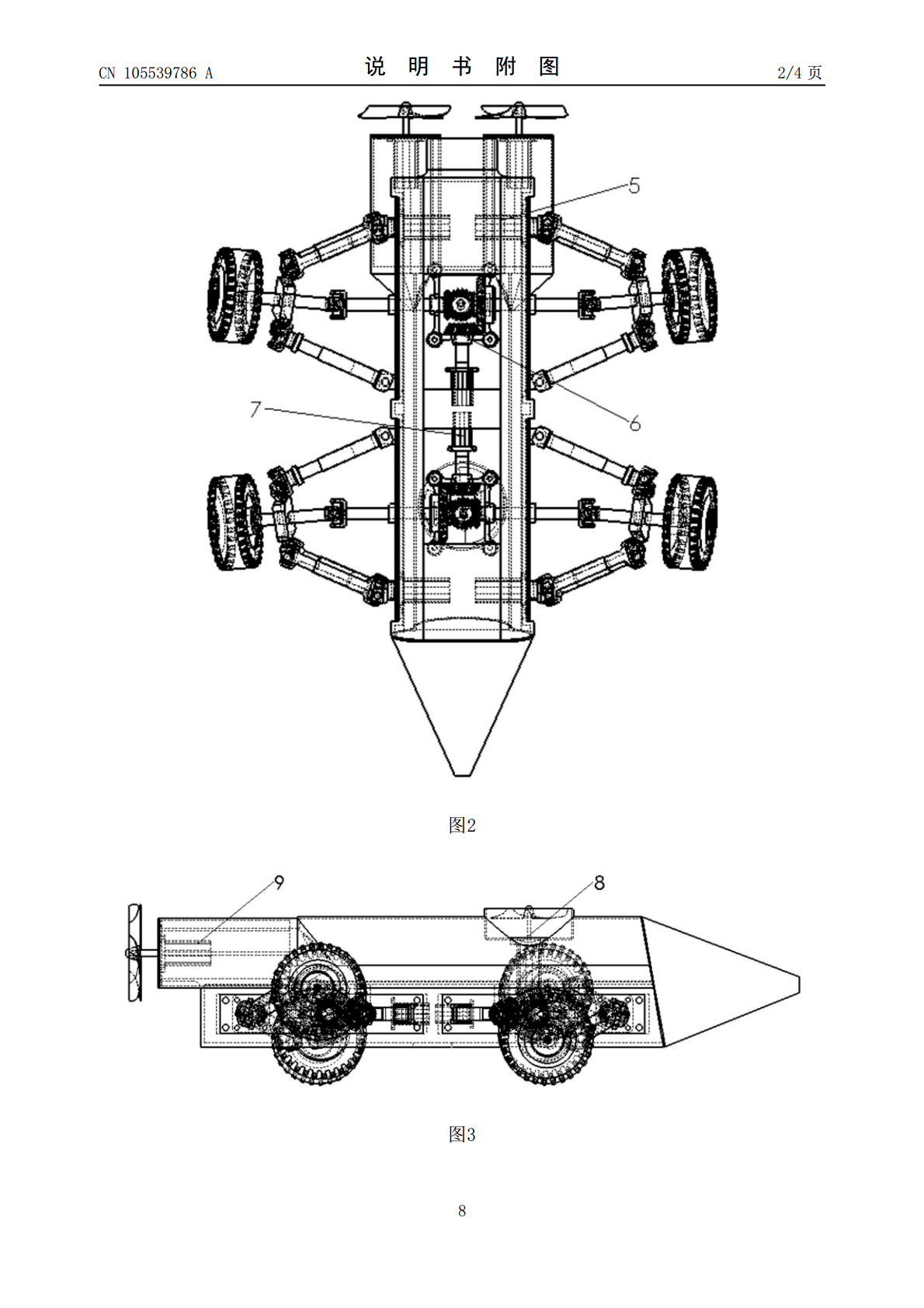
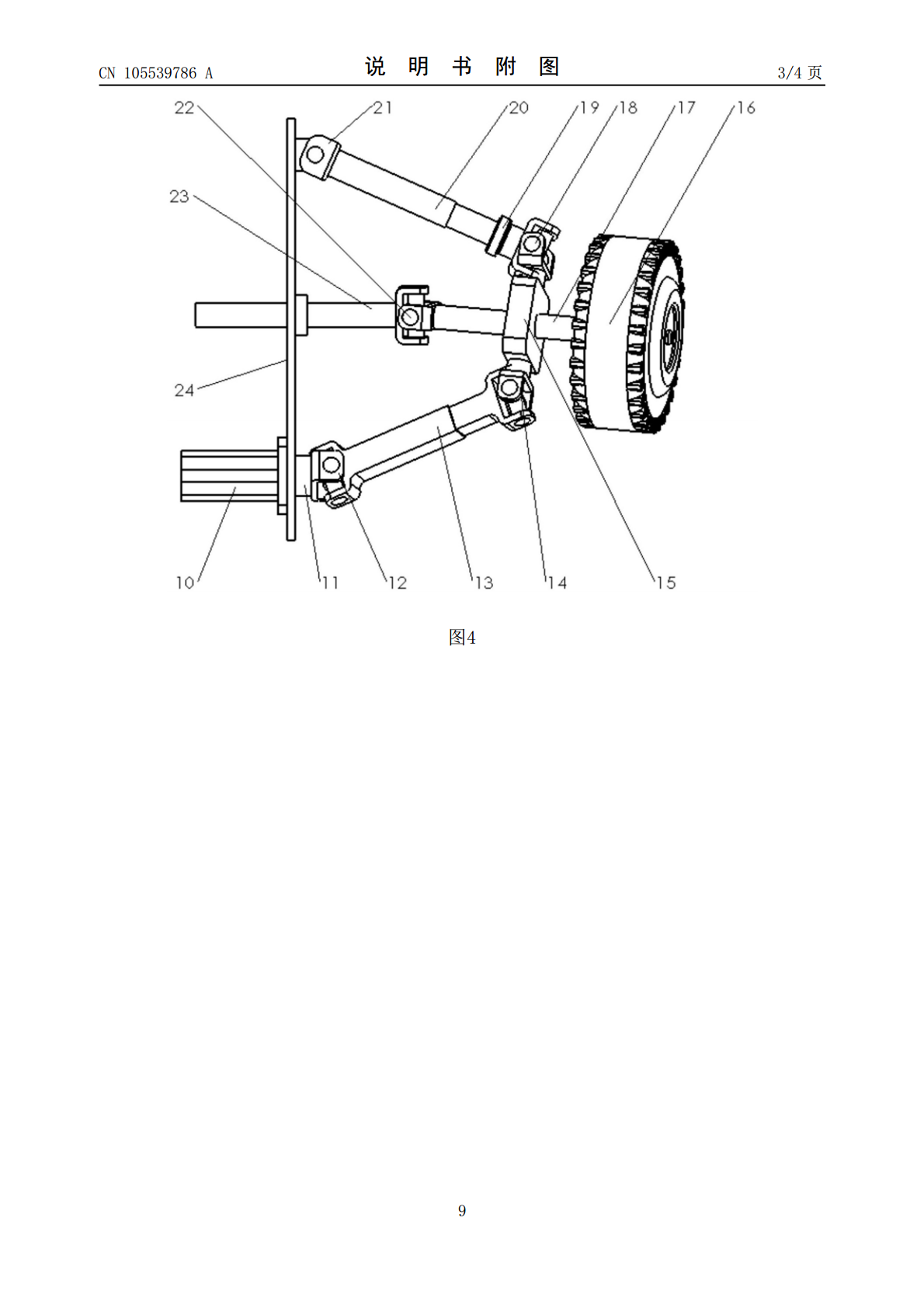
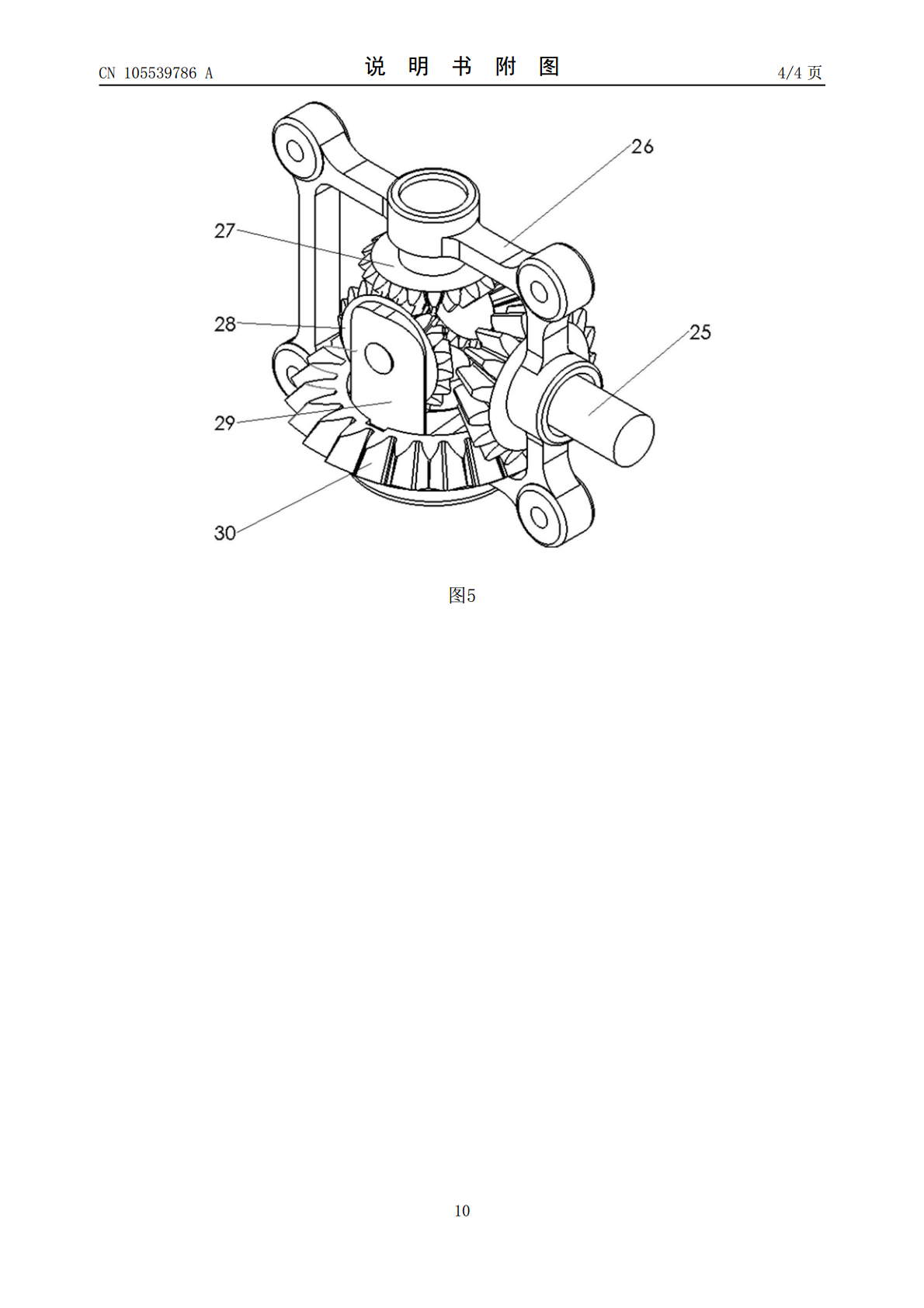
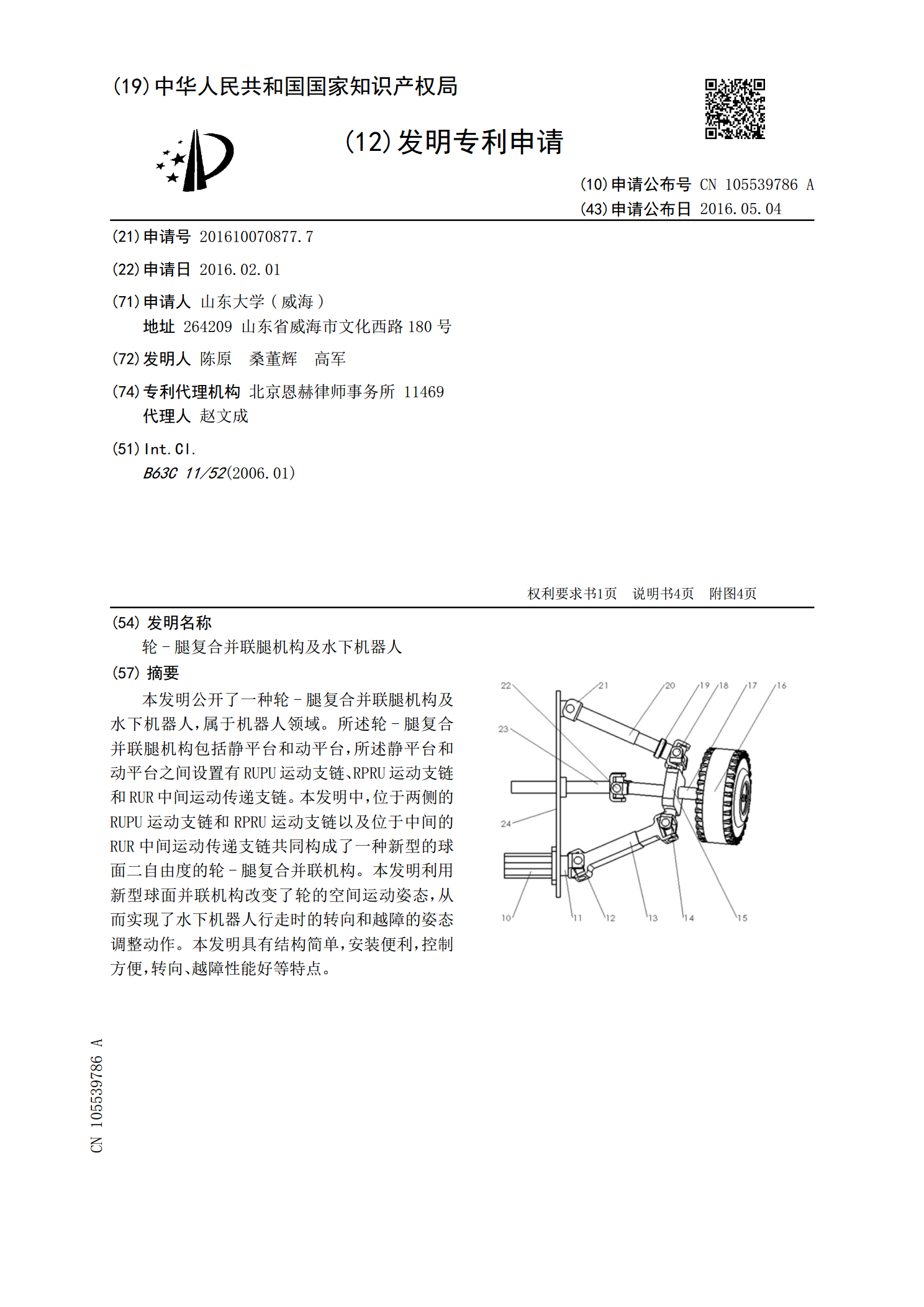
本发明公开了一种轮-腿复合并联腿机构及水下机器人,属于机器人领域。所述轮-腿复合并联腿机构包括静平台和动平台,所述静平台和动平台之间设置有RUPU运动支链、RPRU运动支链和RUR中间运动传递支链。本发明中,位于两侧的RUPU运动支链和RPRU运动支链以及位于中间的RUR中间运动传递支链共同构成了一种新型的球面二自由度的轮-腿复合并联机构。本发明利用新型球面并联机构改变了轮的空间运动姿态,从而实现了水下机器人行走时的转向和越障的姿态调整动作。本发明具有结构简单,安装便利,控制方便,转向、越障性能好等特点。
轮‑腿复合球面并联机构及具有该机构的水下机器人.pdf
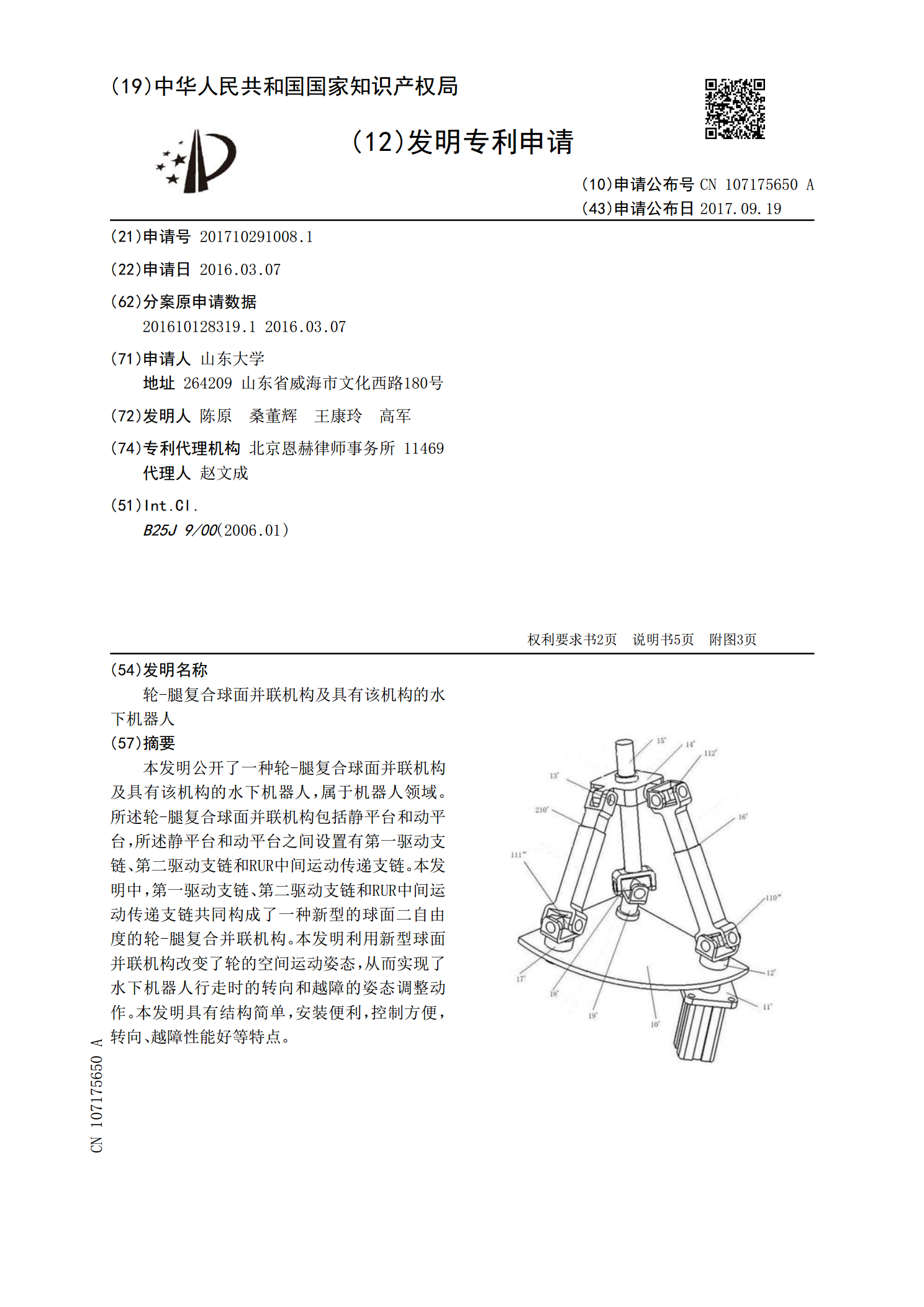
本发明公开了一种轮‑腿复合球面并联机构及具有该机构的水下机器人,属于机器人领域。所述轮‑腿复合球面并联机构包括静平台和动平台,所述静平台和动平台之间设置有第一驱动支链、第二驱动支链和RUR中间运动传递支链。本发明中,第一驱动支链、第二驱动支链和RUR中间运动传递支链共同构成了一种新型的球面二自由度的轮‑腿复合并联机构。本发明利用新型球面并联机构改变了轮的空间运动姿态,从而实现了水下机器人行走时的转向和越障的姿态调整动作。本发明具有结构简单,安装便利,控制方便,转向、越障性能好等特点。

二自由度轮-腿复合球面机构及水下机器人.pdf
本发明公开了一种二自由度轮-腿复合球面机构及水下机器人,属于机器人领域。所述二自由度轮-腿复合球面机构包括静平台和动平台,所述静平台和动平台之间设置有第一驱动支链、第二驱动支链和RUR中间运动传递支链。本发明中,第一驱动支链、第二驱动支链和RUR中间运动传递支链共同构成了一种新型的球面二自由度的轮-腿复合并联机构。本发明利用新型球面并联机构改变了轮的空间运动姿态,从而实现了水下机器人行走时的转向和越障的姿态调整动作。本发明具有结构简单,安装便利,控制方便,转向、越障性能好等特点。
一种轮-腿复合球面并联机构.pdf
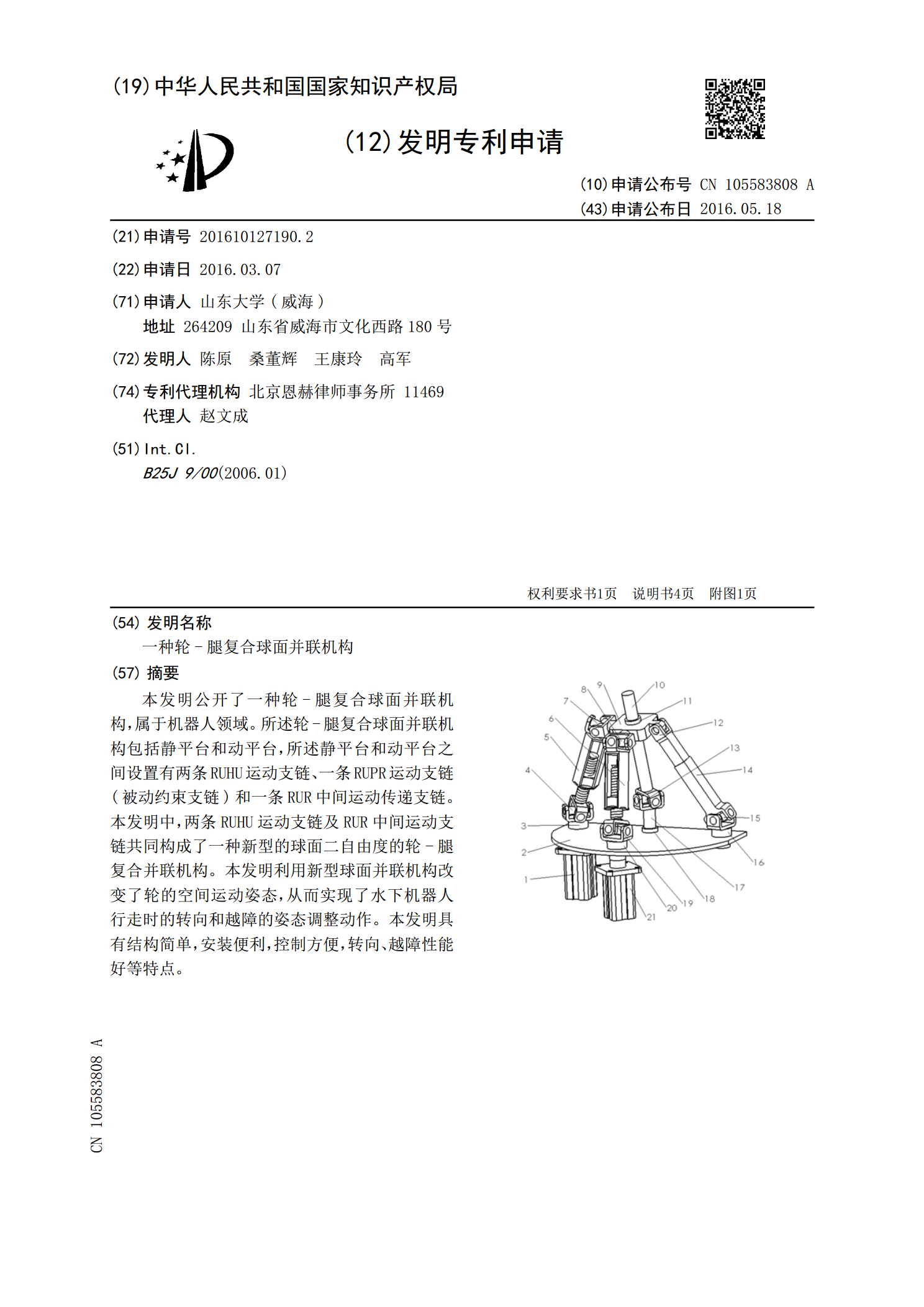
本发明公开了一种轮-腿复合球面并联机构,属于机器人领域。所述轮-腿复合球面并联机构包括静平台和动平台,所述静平台和动平台之间设置有两条RUHU运动支链、一条RUPR运动支链(被动约束支链)和一条RUR中间运动传递支链。本发明中,两条RUHU运动支链及RUR中间运动支链共同构成了一种新型的球面二自由度的轮-腿复合并联机构。本发明利用新型球面并联机构改变了轮的空间运动姿态,从而实现了水下机器人行走时的转向和越障的姿态调整动作。本发明具有结构简单,安装便利,控制方便,转向、越障性能好等特点。
轮腿复合结构及轮腿复合四足仿生机器人.pdf
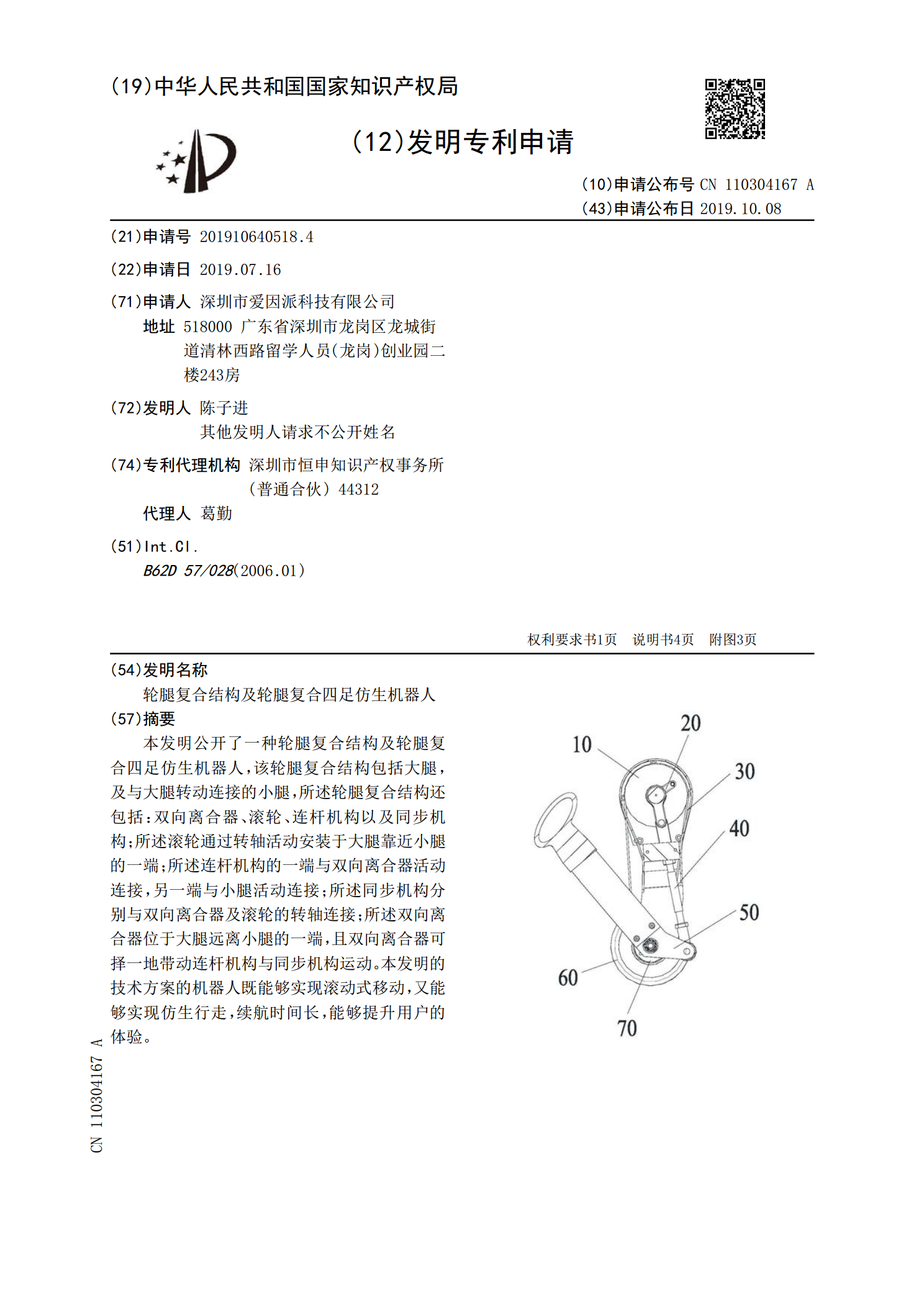
本发明公开了一种轮腿复合结构及轮腿复合四足仿生机器人,该轮腿复合结构包括大腿,及与大腿转动连接的小腿,所述轮腿复合结构还包括:双向离合器、滚轮、连杆机构以及同步机构;所述滚轮通过转轴活动安装于大腿靠近小腿的一端;所述连杆机构的一端与双向离合器活动连接,另一端与小腿活动连接;所述同步机构分别与双向离合器及滚轮的转轴连接;所述双向离合器位于大腿远离小腿的一端,且双向离合器可择一地带动连杆机构与同步机构运动。本发明的技术方案的机器人既能够实现滚动式移动,又能够实现仿生行走,续航时间长,能够提升用户的体验。