
麦克纳姆轮AGV自动寻迹行驶系统.pdf

是来****文章

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
麦克纳姆轮AGV自动寻迹行驶系统.pdf
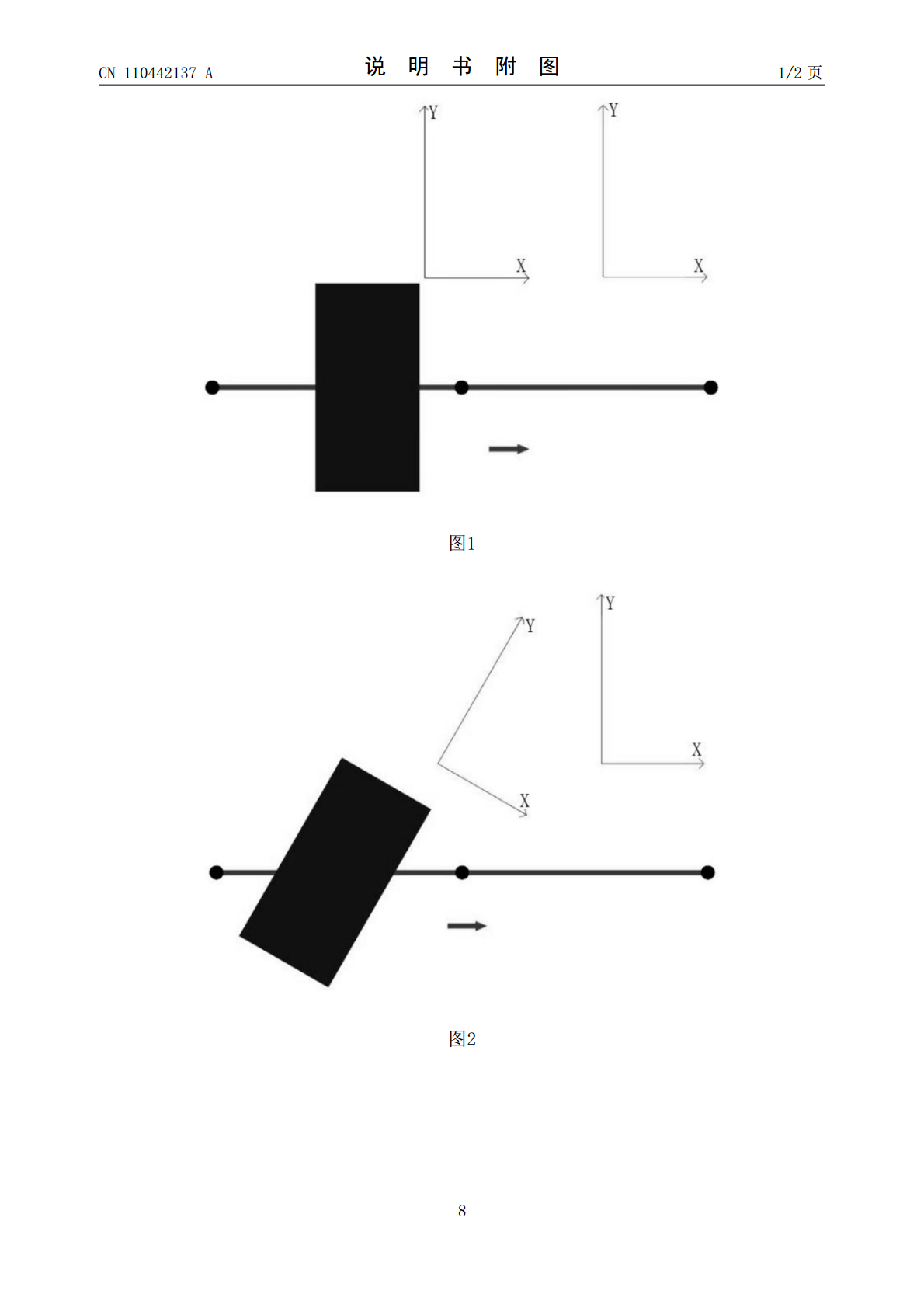
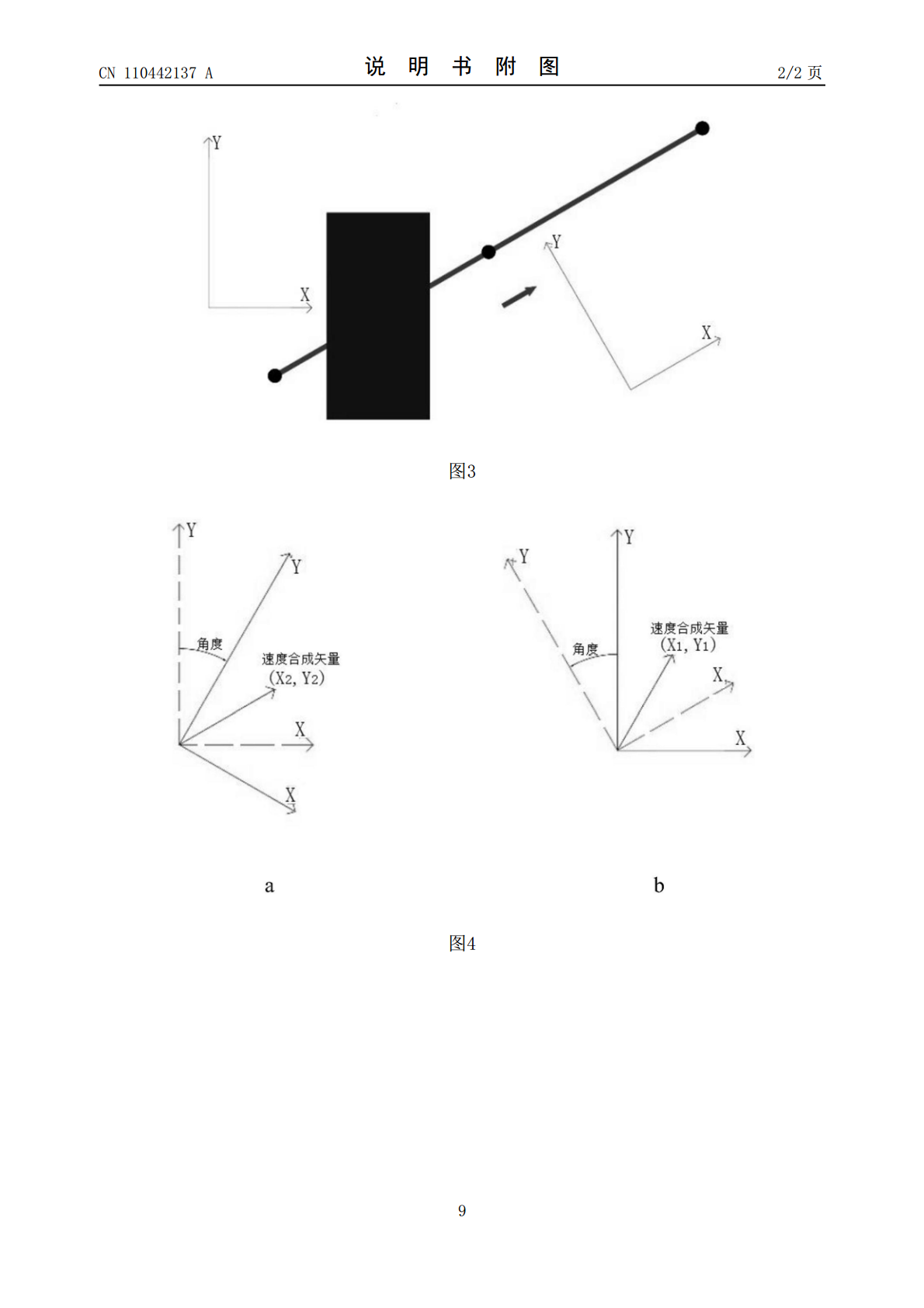
本发明涉及一种麦克纳姆轮AGV自动寻迹行驶系统,涉及AGV自动导航技术领域。本发明实现了麦克纳姆轮AGV在规定路径上以任意姿态进行自动寻迹行驶,解决了麦克纳姆轮AGV在特定情况下需要以某种姿态沿规定路线行进的问题。同现有技术相比,本发明实现了麦克纳姆轮AGV以任意姿态沿规定路线行进,增加了麦克纳姆轮AGV应用模式;具有系统兼容性好的优势,能够很好兼容当前已有算法,系统扩展难度低。

基于麦克纳姆轮的磁导航AGV纠偏控制研究.docx
基于麦克纳姆轮的磁导航AGV纠偏控制研究基于麦克纳姆轮的磁导航AGV纠偏控制研究摘要现代物流行业对于自动化物流系统的需求越来越高,自动导引车(AutomatedGuidedVehicle,AGV)是其中重要的一种机器人。麦克纳姆轮是一种常用于AGV的轮子设计,其独特的轮子排列方式使得车辆能够实现平稳的运动和旋转。本文针对基于麦克纳姆轮的磁导航AGV在运行过程中可能出现的纠偏问题进行了深入研究,提出了一种有效的纠偏控制方法。关键词:自动导引车,麦克纳姆轮,磁导航,纠偏控制1.引言自动导引车(Automate
基于PID算法的高速寻迹麦克纳姆轮底盘系统设计.pptx
汇报人:CONTENTS添加章节标题PID算法原理PID算法简介PID算法工作原理PID算法参数调整PID算法优缺点麦克纳姆轮底盘系统设计麦克纳姆轮简介麦克纳姆轮工作原理麦克纳姆轮底盘系统构成麦克纳姆轮底盘系统特点基于PID算法的寻迹控制寻迹控制系统简介PID算法在寻迹控制中的应用PID算法寻迹控制原理PID算法寻迹控制性能分析系统硬件设计控制器选择与设计传感器选择与接口设计执行器选择与接口设计系统电源及抗干扰设计系统软件设计系统软件架构设计PID算法程序设计传感器数据处理程序设计执行器控制程序设计系统调
一种基于麦克纳姆轮的四驱AGV小车差速直线行驶姿态调整方法.pdf
本发明涉及一种基于麦克纳姆轮的四驱AGV小车差速直线行驶姿态调整方法,属于自动引导车控制技术领域。该方法包括以下步骤:S1:构建AGV车身姿态检测模型,用于实现对行驶过程中的车身姿态检测;S2:构建基于麦克纳姆轮的四驱AGV车身姿态矫正运动模型;S3:进行基于麦克纳姆轮的四驱AGV车身矫正控制。本方法能对基于麦克纳姆轮的四驱AGV小车的循迹运动进行更加实时、准确、有效的控制;在小车进行车姿矫正时,其矫正时间、矫正时间内前进的距离和开始矫正的偏移角度可以按照运行要求进行控制,从而保证AGV小车安全、高效的运
麦克纳姆轮.ppt
电动轮椅的简介电动轮椅的研究意义电动轮椅的研究方向轮椅控制系统逻辑图电动轮椅的详细设计1.轮椅主架设计2.电机的计算和选型以及电机控制电机的选择增量式编码器旋转编码器3.控制电路BTS7960全桥驱动电路示意图4.麦克纳姆轮的结构与选择全向轮的选择QLM-156寸90度全向轮5.升降装置的选型6.电池的选型其他成本核算