
一种差动转向的重型电驱动舵轮.pdf

增梅****主啊


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种差动转向的重型电驱动舵轮.pdf
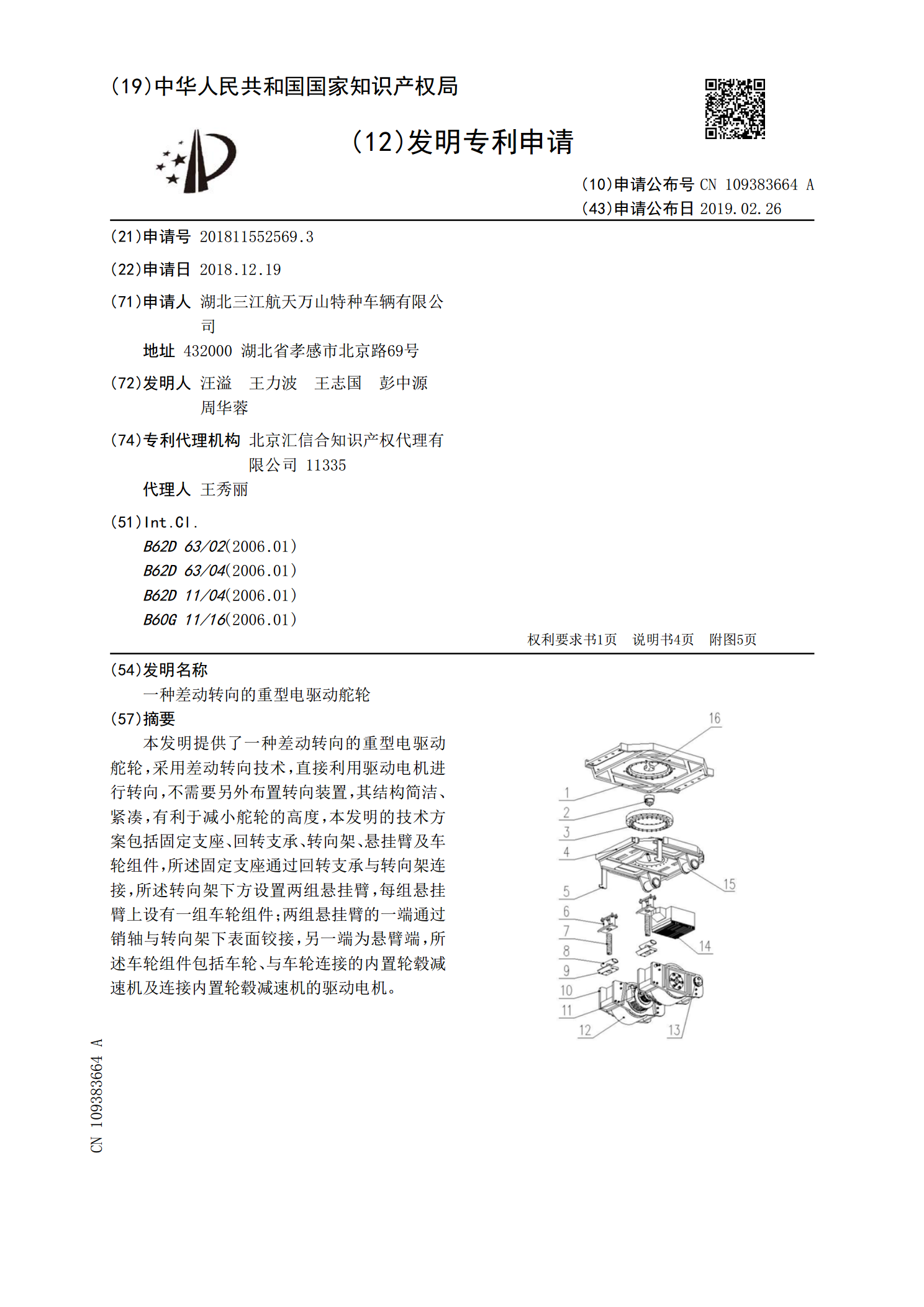
本发明提供了一种差动转向的重型电驱动舵轮,采用差动转向技术,直接利用驱动电机进行转向,不需要另外布置转向装置,其结构简洁、紧凑,有利于减小舵轮的高度,本发明的技术方案包括固定支座、回转支承、转向架、悬挂臂及车轮组件,所述固定支座通过回转支承与转向架连接,所述转向架下方设置两组悬挂臂,每组悬挂臂上设有一组车轮组件;两组悬挂臂的一端通过销轴与转向架下表面铰接,另一端为悬臂端,所述车轮组件包括车轮、与车轮连接的内置轮毂减速机及连接内置轮毂减速机的驱动电机。

一种重型电驱动舵轮.pdf
本发明提供了一种重型电驱动舵轮,采用电驱动的方式,能够实现自主转向,具备升降或者缓冲功能,能够有效实现对地面的补偿功能,本发明的技术方案包括固定支座、转向支座、转向机构及车轮机构,所述转向支座上方与固定支座连接,下方与转向机构连接,所述转向机构下方连接车轮机构;所述转向机构包括蜗轮蜗杆式回转支撑及与蜗杆连接的转向驱动装置,所述车轮机构包括转向轮架及与转向轮架连接的车轮,所述转向轮架与蜗轮蜗杆式回转支撑固定连接;所述固定支座与转向支座之间设有升降机构或缓冲机构。

双支撑舵轮驱动转向机构总成.pdf
本发明公开了一种双支撑舵轮驱动转向机构总成,其中,包括:安装板上表面安装有回转支承,所述安装板下板面安装有第一支撑板、第二支撑板,所述第一支撑板与所述第二支撑板之间安装有精密行星轮;所述第一支撑板上还安装有伺服驱动电机,所述伺服驱动电机的驱动轴伸入所述精密行星轮。本发明采用了第一支撑板、第二支撑板的双支撑结构,在双支撑结构之间安装精密行星轮,使得本发明的结构更加紧凑,集成度更高。本发明体积占用空间小、结构精简,其在减速传递过程中达到更加高效、连续、稳定地将旋转扭矩传递地驱动轮,有效增加了舵轮驱动装置的灵活

一种重型电驱动全轮转向全轮驱动无人框架运输车.pdf
本发明提供一种重型电驱动全轮驱动无人框架运输车,包括用于放置货物的车架总成,还包括:转向总成,包括转向油缸Ⅰ、转向油缸Ⅱ、车架连接板、两个主动转向结构和固定安装于所述车架总成的油缸连接座;其中,所述车架连接板与所述车架总成转动连接,所述转向油缸Ⅰ和所述转向油缸Ⅱ的油缸杆和尾部分别与所述车架连接板和所述油缸连接座转动连接,两个所述主动转向结构分别转动连接于所述车架总成,且分别通过连杆Ⅰ转动连接于所述车架连接板两侧;驱动桥总成和悬挂总成,所述悬挂总成包括悬挂油缸和平衡臂。本发明的技术方案解决了现有技术中的现有

一种电驱动转向底盘.pdf
本发明提供一种能够保证前后两个车架转动的角度协调一致,转弯半径小,通过左右车轮的转速差实现底盘的转向和行走,提高底盘行走时的稳定性和转向响应速度的一种电驱动转向底盘。它包括底盘、前车架、后车架、控制器,在前车架两端设置左右两个前轮,在后车架两端设置左右两个后轮,左右两个前轮是由两个前轮毂电机分别驱动的前轮,用于控制左右两个前轮毂电机的控制器与所述前轮毂电机电连接;前车架、后车架与底盘之间分别形成以其竖直的前后轴线为中心线的转动连接;第一转向推拉杆的两端分别与左前连接座和右后连接座铰接,或者分别与右前连接座