
连续行走式爬杆机器人.pdf

Ja****20


1/10
2/10
3/10

4/10
5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
连续行走式爬杆机器人.pdf
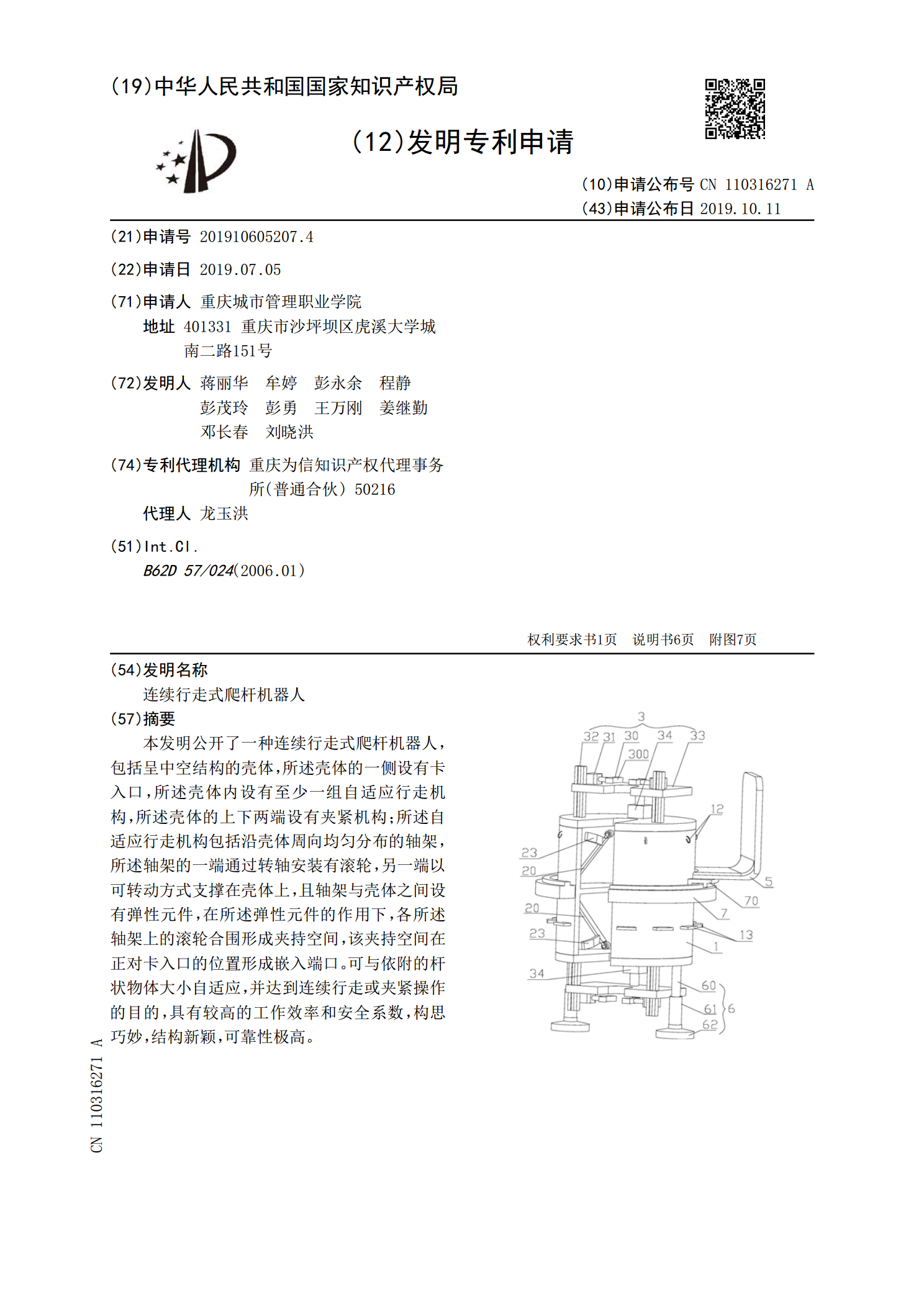
本发明公开了一种连续行走式爬杆机器人,包括呈中空结构的壳体,所述壳体的一侧设有卡入口,所述壳体内设有至少一组自适应行走机构,所述壳体的上下两端设有夹紧机构;所述自适应行走机构包括沿壳体周向均匀分布的轴架,所述轴架的一端通过转轴安装有滚轮,另一端以可转动方式支撑在壳体上,且轴架与壳体之间设有弹性元件,在所述弹性元件的作用下,各所述轴架上的滚轮合围形成夹持空间,该夹持空间在正对卡入口的位置形成嵌入端口。可与依附的杆状物体大小自适应,并达到连续行走或夹紧操作的目的,具有较高的工作效率和安全系数,构思巧妙,结构新
脚扣连续式爬杆装置及其爬杆方法.pdf
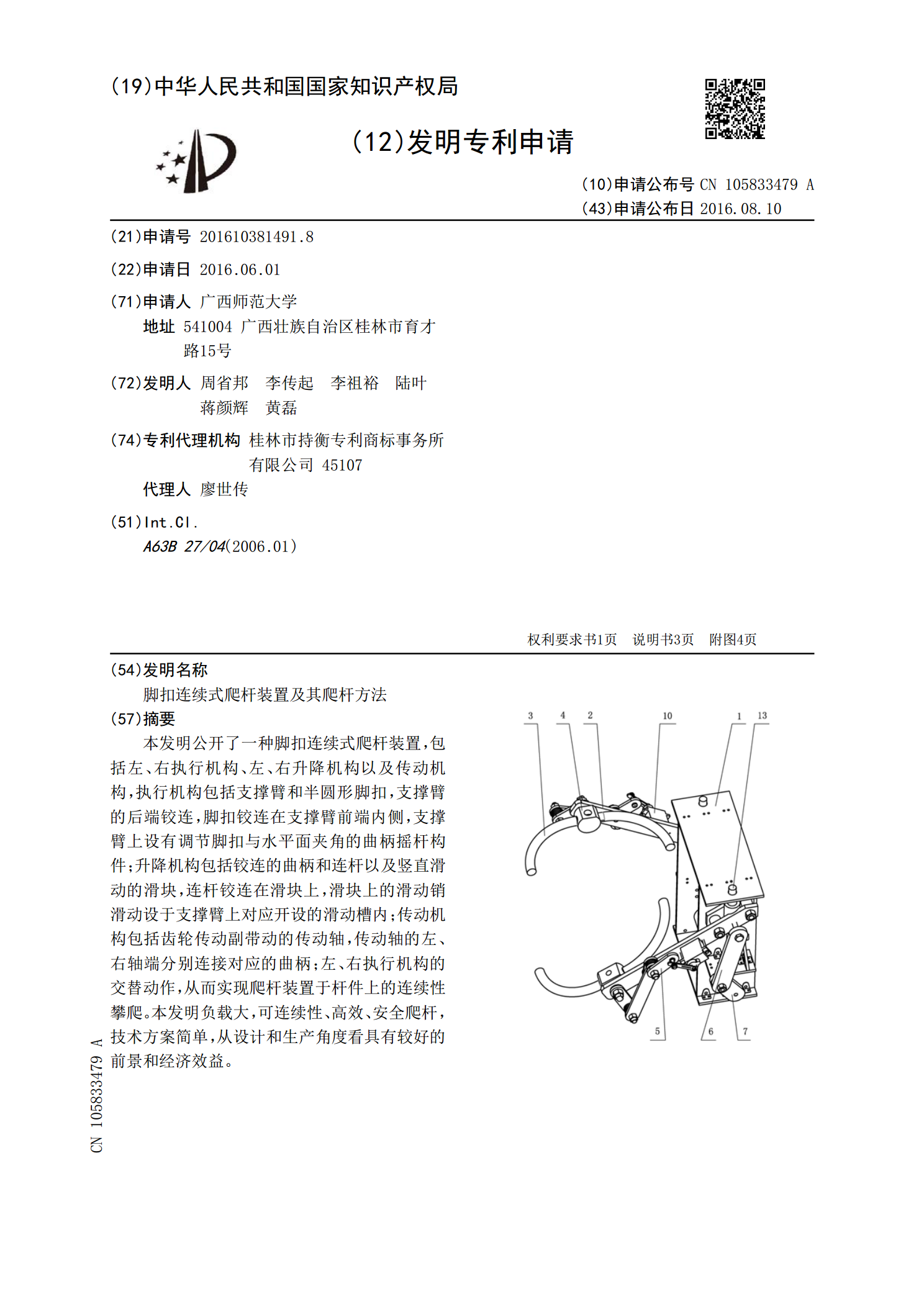
本发明公开了一种脚扣连续式爬杆装置,包括左、右执行机构、左、右升降机构以及传动机构,执行机构包括支撑臂和半圆形脚扣,支撑臂的后端铰连,脚扣铰连在支撑臂前端内侧,支撑臂上设有调节脚扣与水平面夹角的曲柄摇杆构件;升降机构包括铰连的曲柄和连杆以及竖直滑动的滑块,连杆铰连在滑块上,滑块上的滑动销滑动设于支撑臂上对应开设的滑动槽内;传动机构包括齿轮传动副带动的传动轴,传动轴的左、右轴端分别连接对应的曲柄;左、右执行机构的交替动作,从而实现爬杆装置于杆件上的连续性攀爬。本发明负载大,可连续性、高效、安全爬杆,技术方案
蠕动式爬杆机器人.pdf
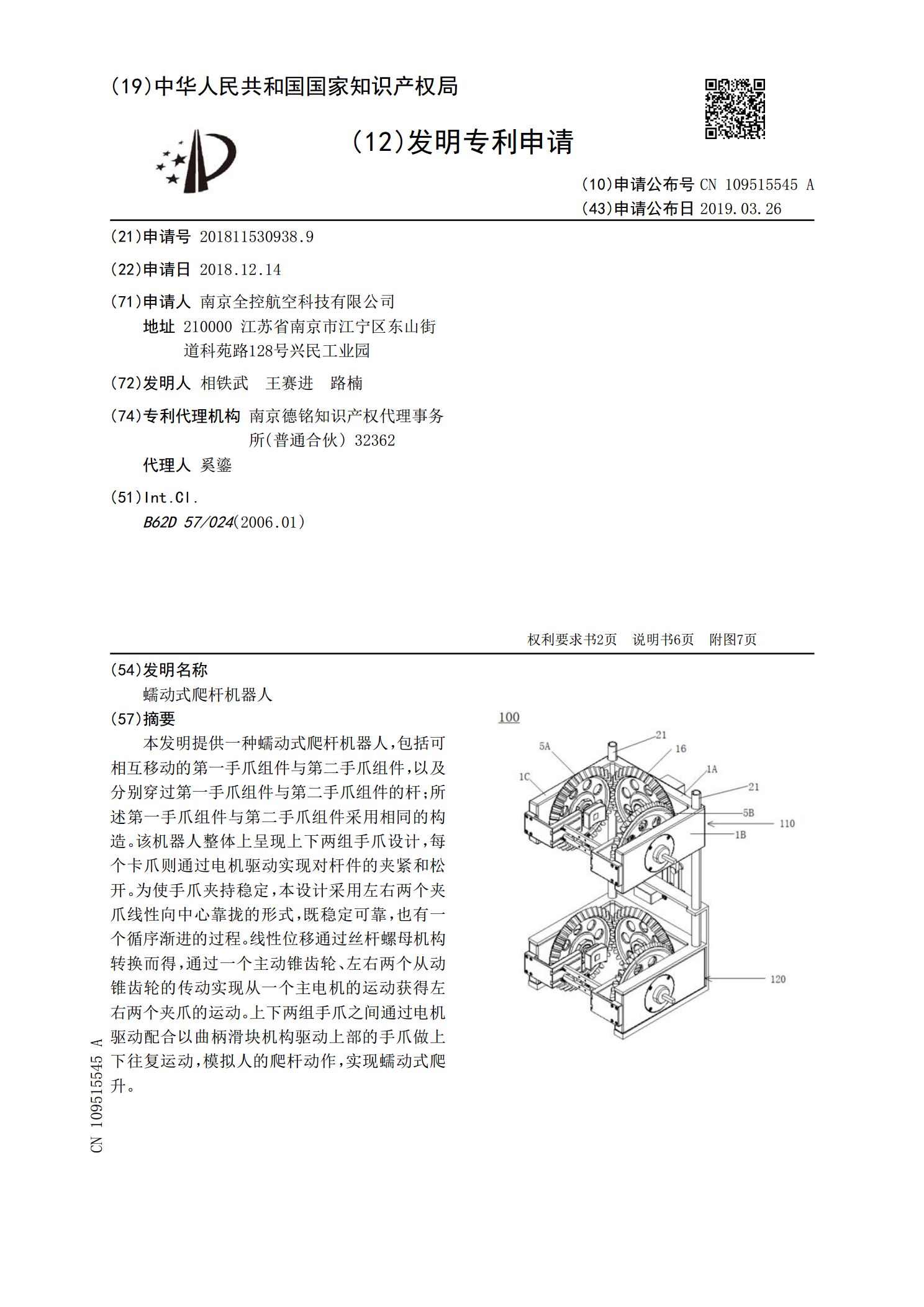
本发明提供一种蠕动式爬杆机器人,包括可相互移动的第一手爪组件与第二手爪组件,以及分别穿过第一手爪组件与第二手爪组件的杆;所述第一手爪组件与第二手爪组件采用相同的构造。该机器人整体上呈现上下两组手爪设计,每个卡爪则通过电机驱动实现对杆件的夹紧和松开。为使手爪夹持稳定,本设计采用左右两个夹爪线性向中心靠拢的形式,既稳定可靠,也有一个循序渐进的过程。线性位移通过丝杆螺母机构转换而得,通过一个主动锥齿轮、左右两个从动锥齿轮的传动实现从一个主电机的运动获得左右两个夹爪的运动。上下两组手爪之间通过电机驱动配合以曲柄滑

步行式爬杆机器人.pdf
步行式爬杆机器人是一套以单电机为动力的纯机械结构的机器人,主要用于圆柱、类圆柱塔的攀爬,利用其可扩展的搭载平台能够实现载人、起重,实施对圆柱、类圆柱塔类建筑、工程设备的安装、维修等工作,属于机器人和工程机械设计领域。本发明以摩擦自锁为基本原理,以电机的正反转和曲柄滑块机构配合齿轮传动机构实现机器人的上升下降以及动力传递;以凸轮机构配合摇杆滑块机构实现机器人与攀爬物之间的摩擦自锁与攀爬臂的外展绕行运动。本发明的纯机械结构使得机器人工作稳定性高,攀爬速度快,工况适应性强,拆装便捷,便于转场。
一种连续爬杆式公路路灯智能维修机器人.pdf
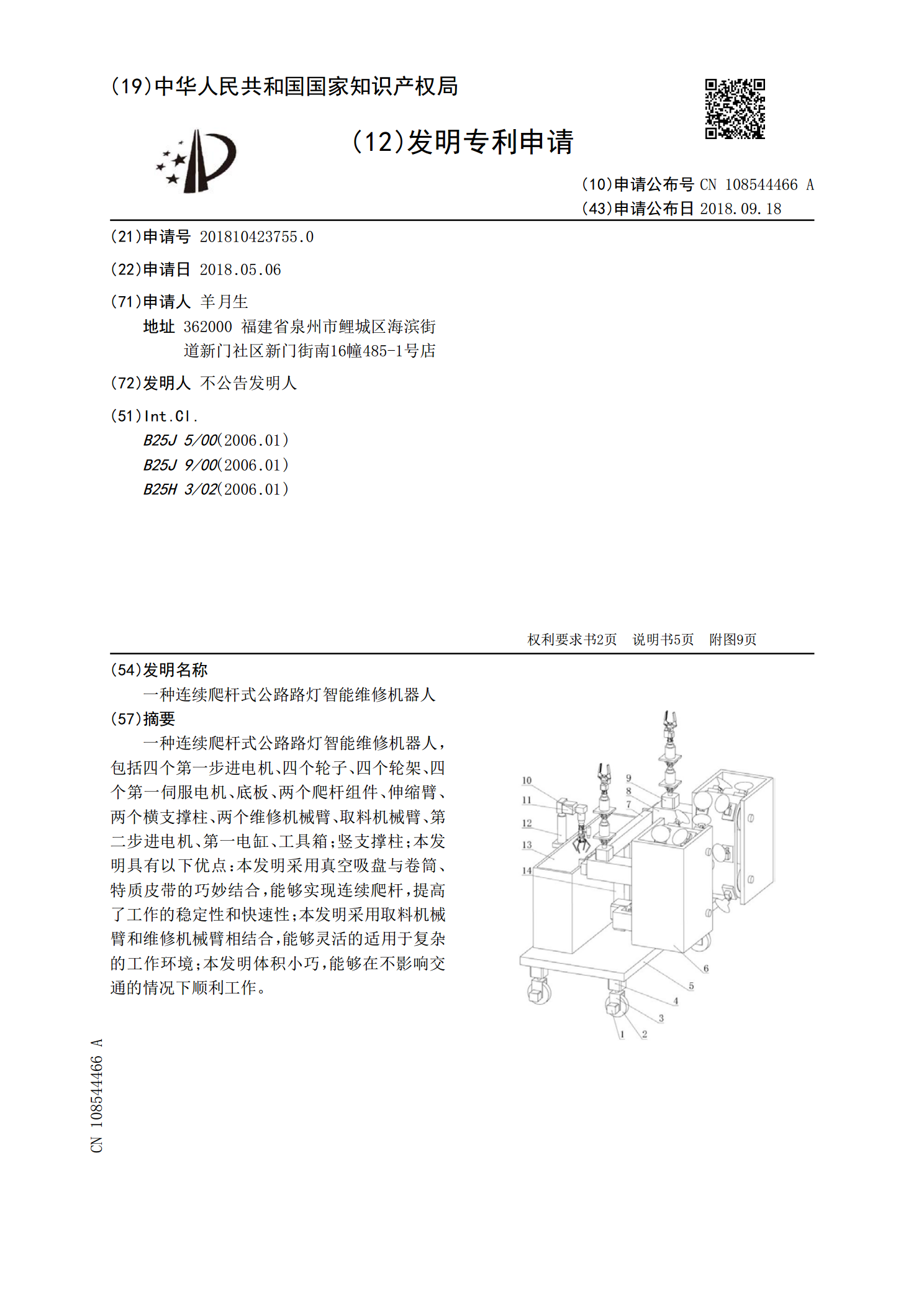
一种连续爬杆式公路路灯智能维修机器人,包括四个第一步进电机、四个轮子、四个轮架、四个第一伺服电机、底板、两个爬杆组件、伸缩臂、两个横支撑柱、两个维修机械臂、取料机械臂、第二步进电机、第一电缸、工具箱;竖支撑柱;本发明具有以下优点:本发明采用真空吸盘与卷筒、特质皮带的巧妙结合,能够实现连续爬杆,提高了工作的稳定性和快速性;本发明采用取料机械臂和维修机械臂相结合,能够灵活的适用于复杂的工作环境;本发明体积小巧,能够在不影响交通的情况下顺利工作。