
步行式爬杆机器人.pdf

听云****君哇


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

步行式爬杆机器人.pdf
步行式爬杆机器人是一套以单电机为动力的纯机械结构的机器人,主要用于圆柱、类圆柱塔的攀爬,利用其可扩展的搭载平台能够实现载人、起重,实施对圆柱、类圆柱塔类建筑、工程设备的安装、维修等工作,属于机器人和工程机械设计领域。本发明以摩擦自锁为基本原理,以电机的正反转和曲柄滑块机构配合齿轮传动机构实现机器人的上升下降以及动力传递;以凸轮机构配合摇杆滑块机构实现机器人与攀爬物之间的摩擦自锁与攀爬臂的外展绕行运动。本发明的纯机械结构使得机器人工作稳定性高,攀爬速度快,工况适应性强,拆装便捷,便于转场。
蠕动式爬杆机器人.pdf
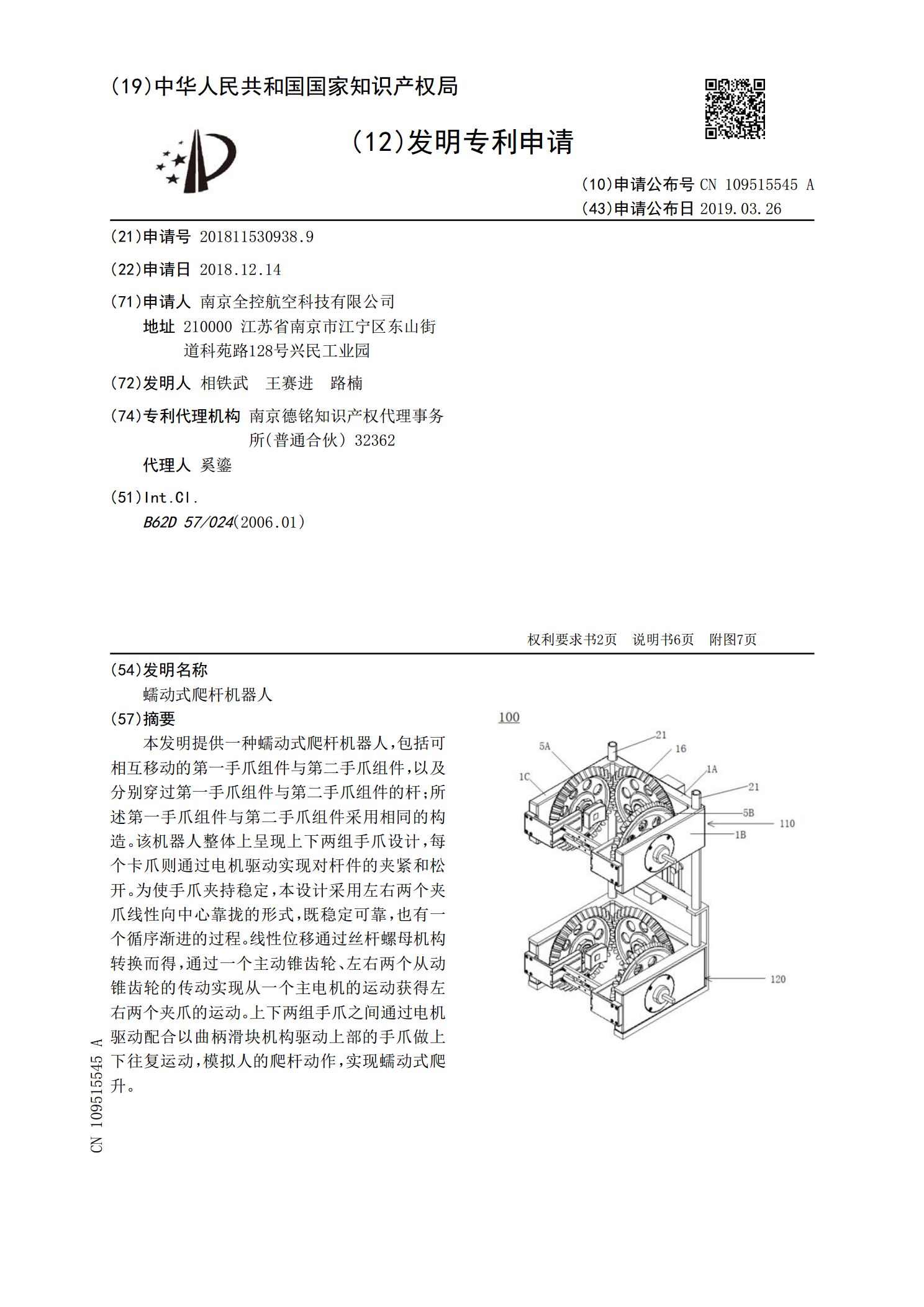
本发明提供一种蠕动式爬杆机器人,包括可相互移动的第一手爪组件与第二手爪组件,以及分别穿过第一手爪组件与第二手爪组件的杆;所述第一手爪组件与第二手爪组件采用相同的构造。该机器人整体上呈现上下两组手爪设计,每个卡爪则通过电机驱动实现对杆件的夹紧和松开。为使手爪夹持稳定,本设计采用左右两个夹爪线性向中心靠拢的形式,既稳定可靠,也有一个循序渐进的过程。线性位移通过丝杆螺母机构转换而得,通过一个主动锥齿轮、左右两个从动锥齿轮的传动实现从一个主电机的运动获得左右两个夹爪的运动。上下两组手爪之间通过电机驱动配合以曲柄滑
连续行走式爬杆机器人.pdf
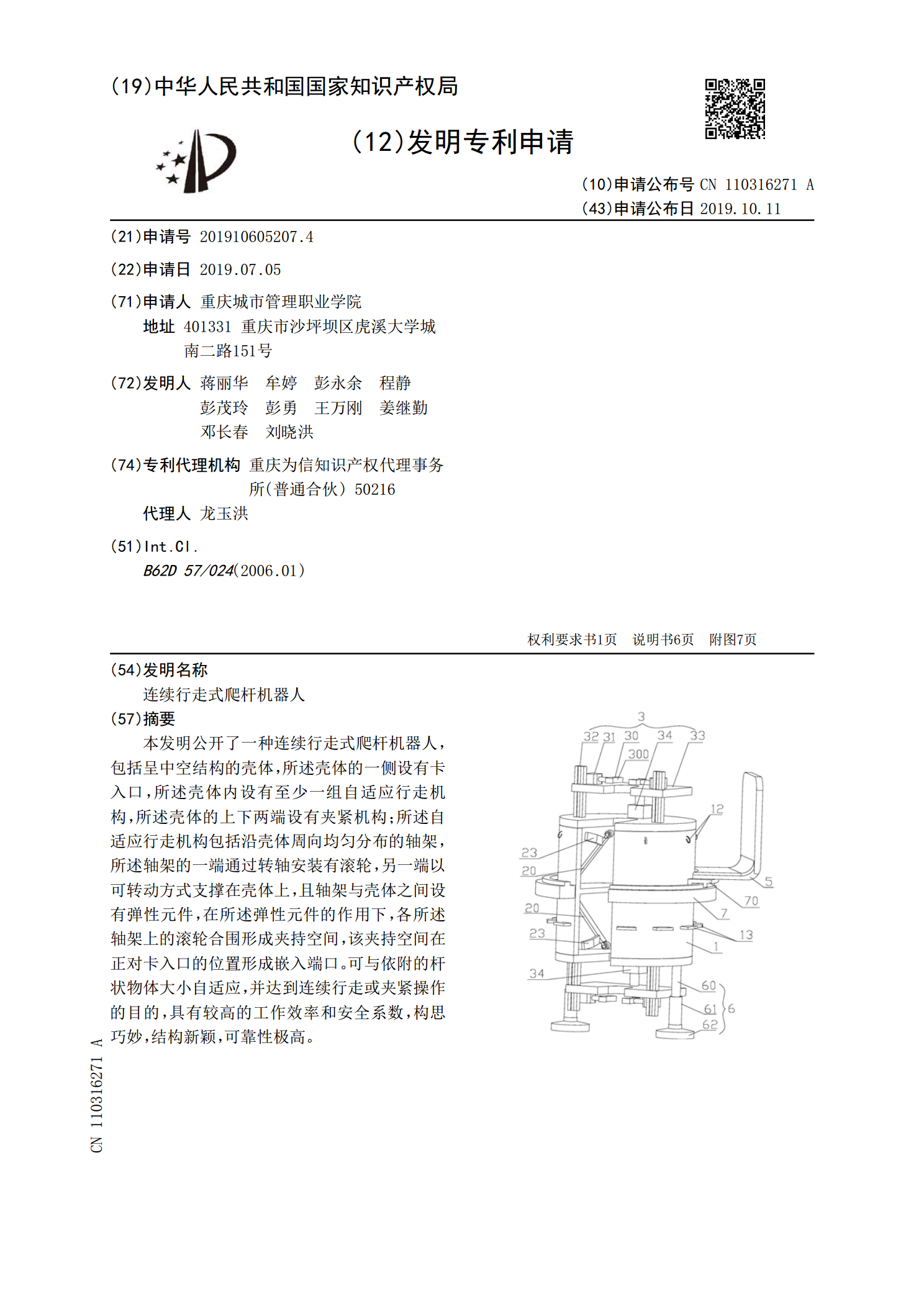
本发明公开了一种连续行走式爬杆机器人,包括呈中空结构的壳体,所述壳体的一侧设有卡入口,所述壳体内设有至少一组自适应行走机构,所述壳体的上下两端设有夹紧机构;所述自适应行走机构包括沿壳体周向均匀分布的轴架,所述轴架的一端通过转轴安装有滚轮,另一端以可转动方式支撑在壳体上,且轴架与壳体之间设有弹性元件,在所述弹性元件的作用下,各所述轴架上的滚轮合围形成夹持空间,该夹持空间在正对卡入口的位置形成嵌入端口。可与依附的杆状物体大小自适应,并达到连续行走或夹紧操作的目的,具有较高的工作效率和安全系数,构思巧妙,结构新
关节式爬杆检测机器人.pdf
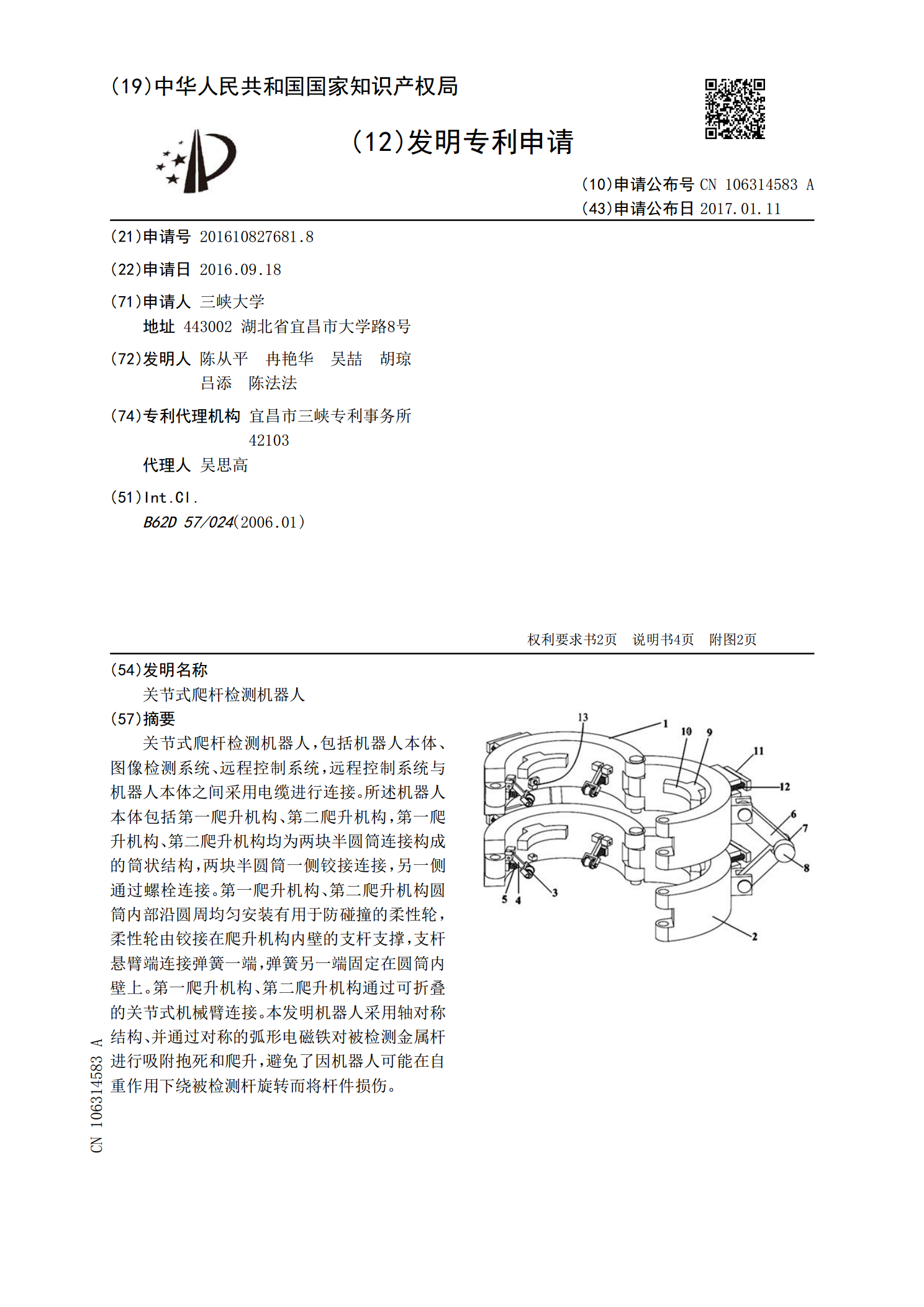
关节式爬杆检测机器人,包括机器人本体、图像检测系统、远程控制系统,远程控制系统与机器人本体之间采用电缆进行连接。所述机器人本体包括第一爬升机构、第二爬升机构,第一爬升机构、第二爬升机构均为两块半圆筒连接构成的筒状结构,两块半圆筒一侧铰接连接,另一侧通过螺栓连接。第一爬升机构、第二爬升机构圆筒内部沿圆周均匀安装有用于防碰撞的柔性轮,柔性轮由铰接在爬升机构内壁的支杆支撑,支杆悬臂端连接弹簧一端,弹簧另一端固定在圆筒内壁上。第一爬升机构、第二爬升机构通过可折叠的关节式机械臂连接。本发明机器人采用轴对称结构、并通
一种环抱式爬杆机器人.pdf
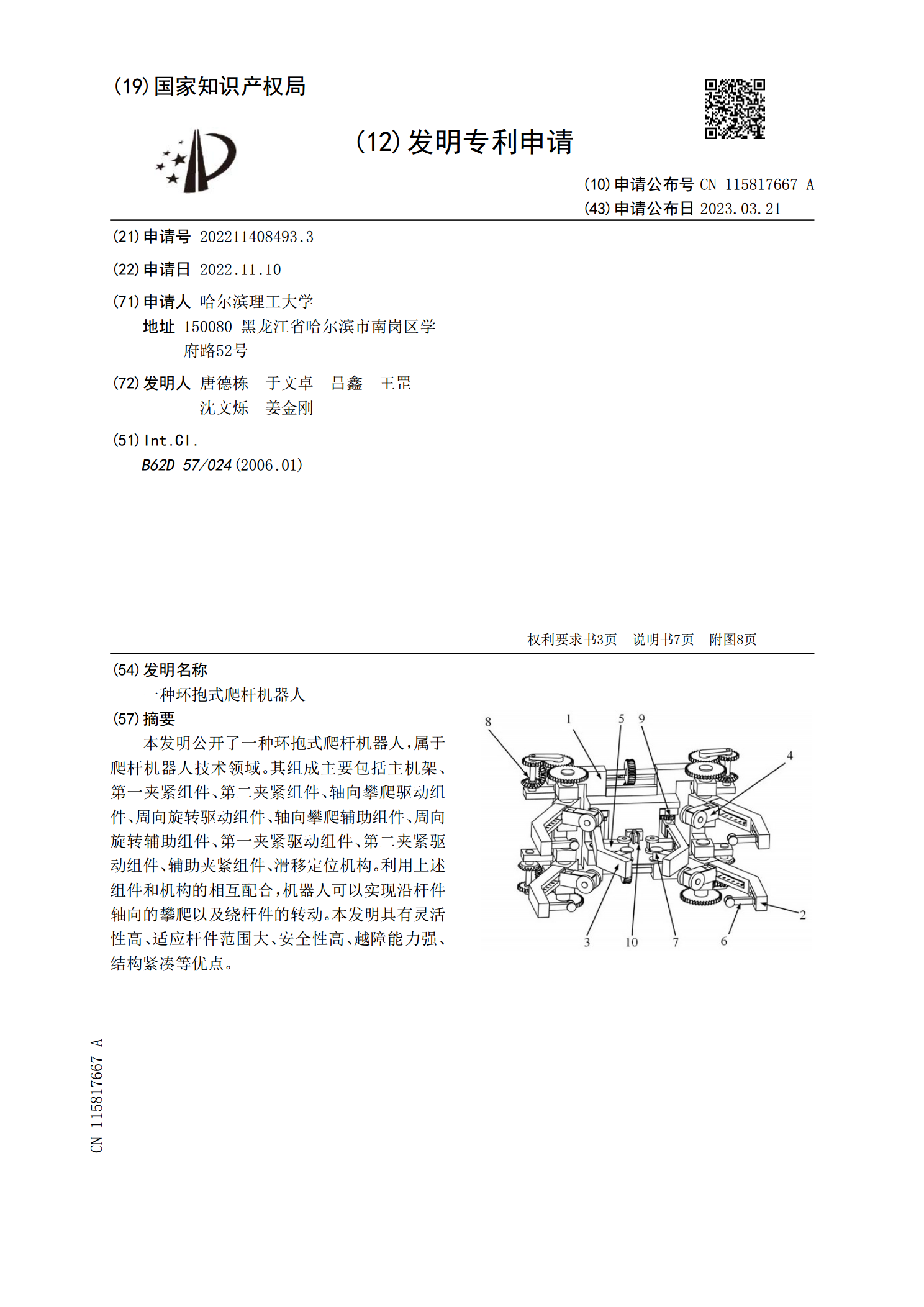
本发明公开了一种环抱式爬杆机器人,属于爬杆机器人技术领域。其组成主要包括主机架、第一夹紧组件、第二夹紧组件、轴向攀爬驱动组件、周向旋转驱动组件、轴向攀爬辅助组件、周向旋转辅助组件、第一夹紧驱动组件、第二夹紧驱动组件、辅助夹紧组件、滑移定位机构。利用上述组件和机构的相互配合,机器人可以实现沿杆件轴向的攀爬以及绕杆件的转动。本发明具有灵活性高、适应杆件范围大、安全性高、越障能力强、结构紧凑等优点。