
脚扣连续式爬杆装置及其爬杆方法.pdf

永香****能手


1/9

2/9
3/9

4/9

5/9
6/9
7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
脚扣连续式爬杆装置及其爬杆方法.pdf
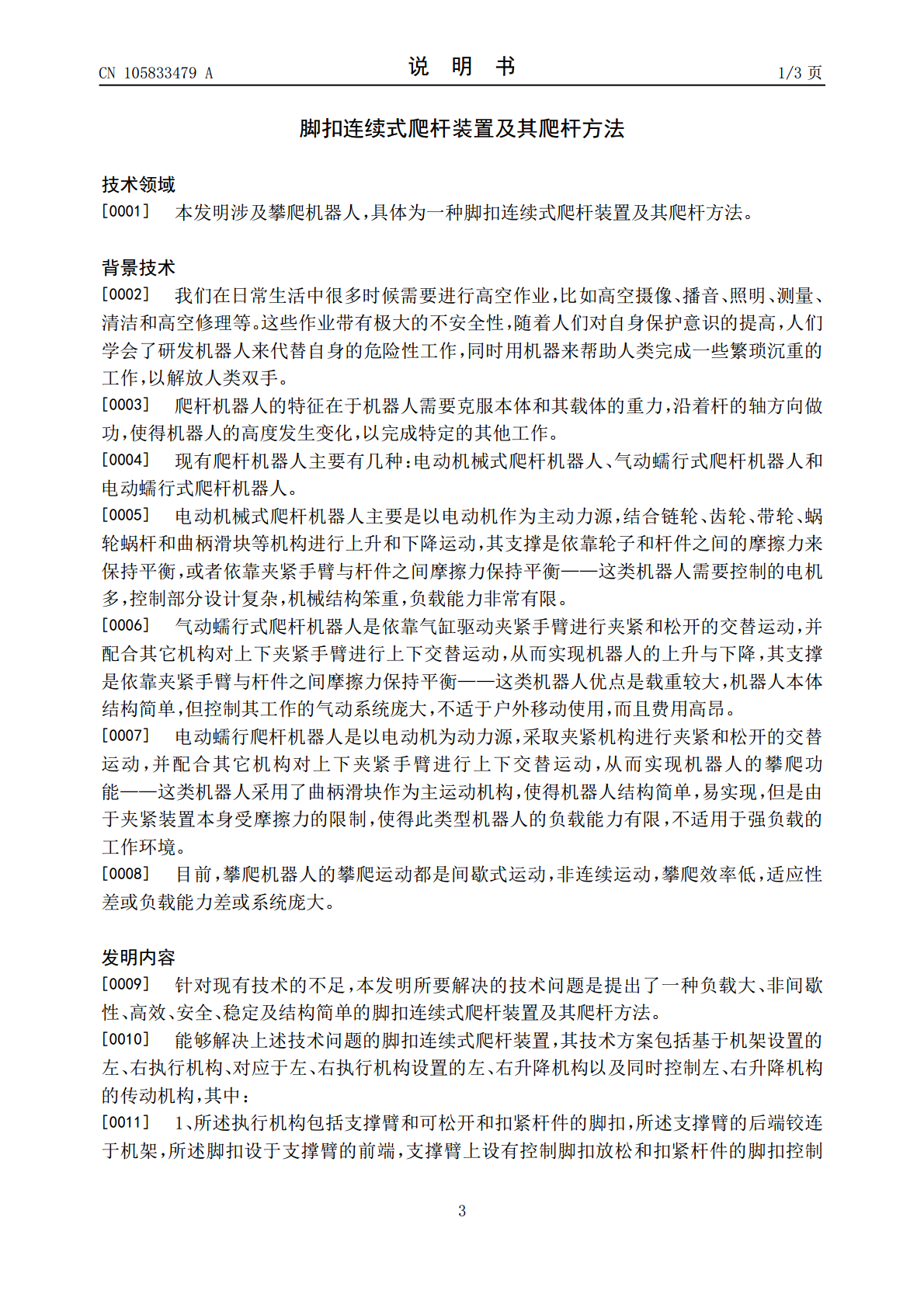
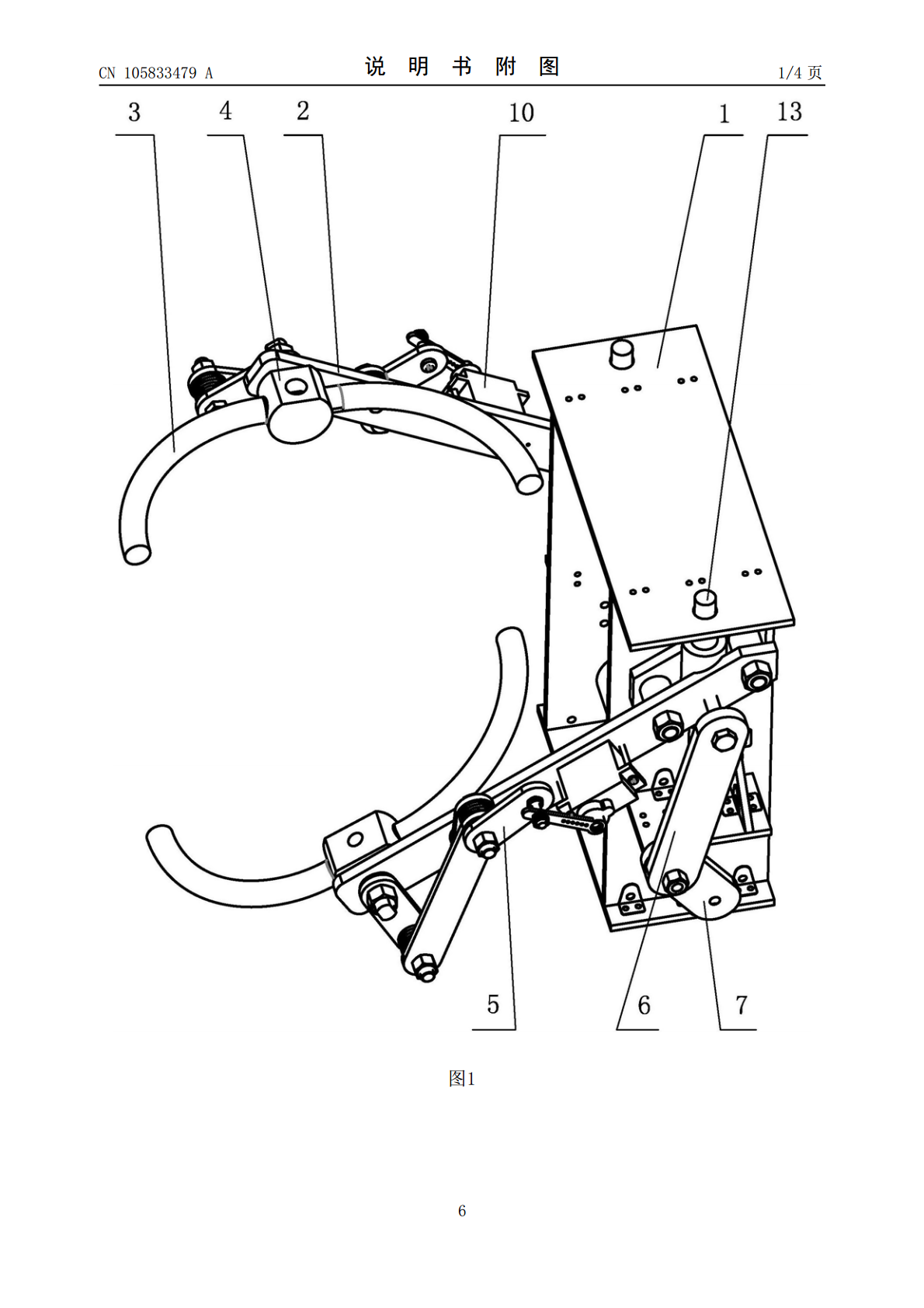
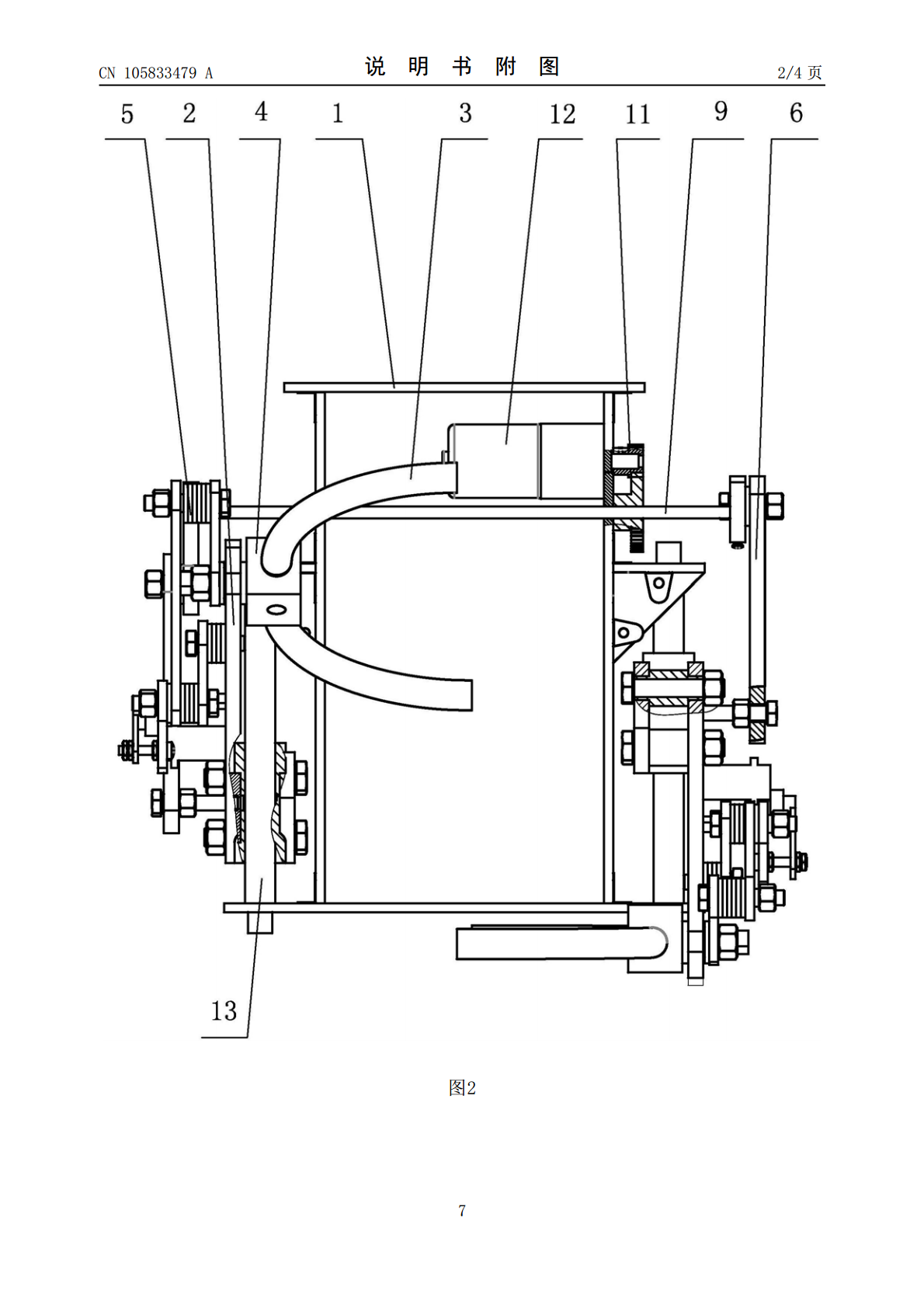
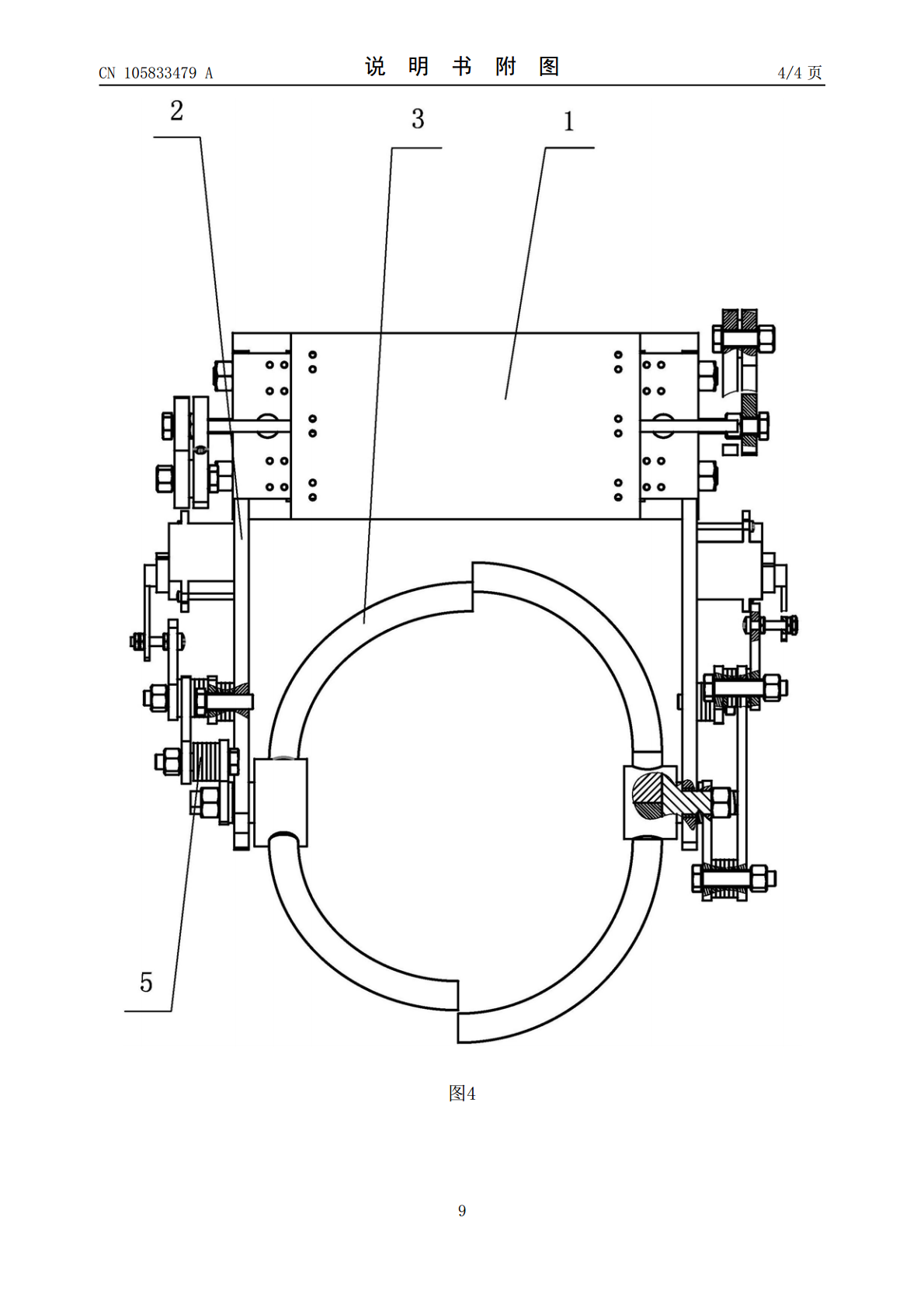
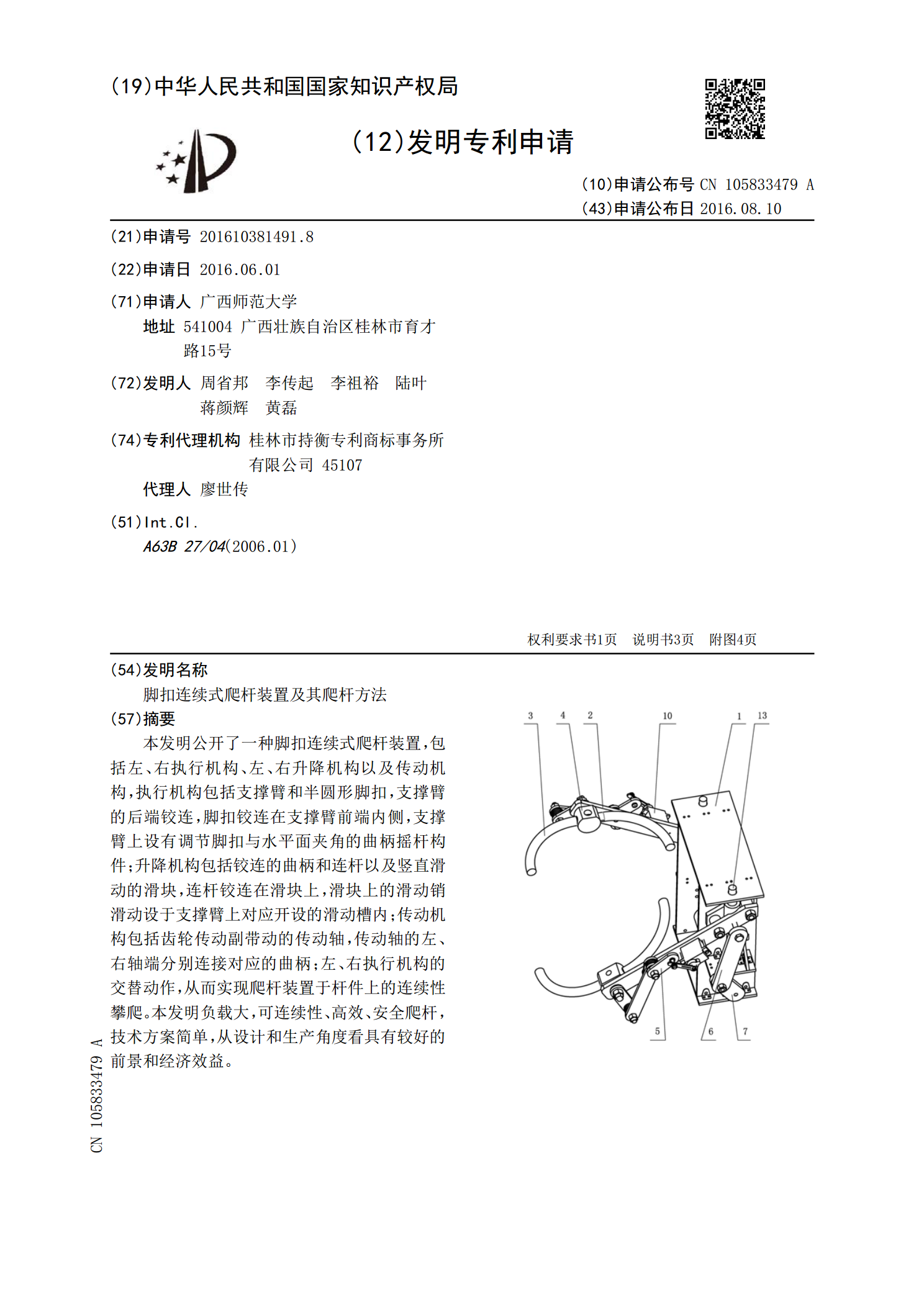
本发明公开了一种脚扣连续式爬杆装置,包括左、右执行机构、左、右升降机构以及传动机构,执行机构包括支撑臂和半圆形脚扣,支撑臂的后端铰连,脚扣铰连在支撑臂前端内侧,支撑臂上设有调节脚扣与水平面夹角的曲柄摇杆构件;升降机构包括铰连的曲柄和连杆以及竖直滑动的滑块,连杆铰连在滑块上,滑块上的滑动销滑动设于支撑臂上对应开设的滑动槽内;传动机构包括齿轮传动副带动的传动轴,传动轴的左、右轴端分别连接对应的曲柄;左、右执行机构的交替动作,从而实现爬杆装置于杆件上的连续性攀爬。本发明负载大,可连续性、高效、安全爬杆,技术方案
一种爬杆装置及其爬杆方法.pdf
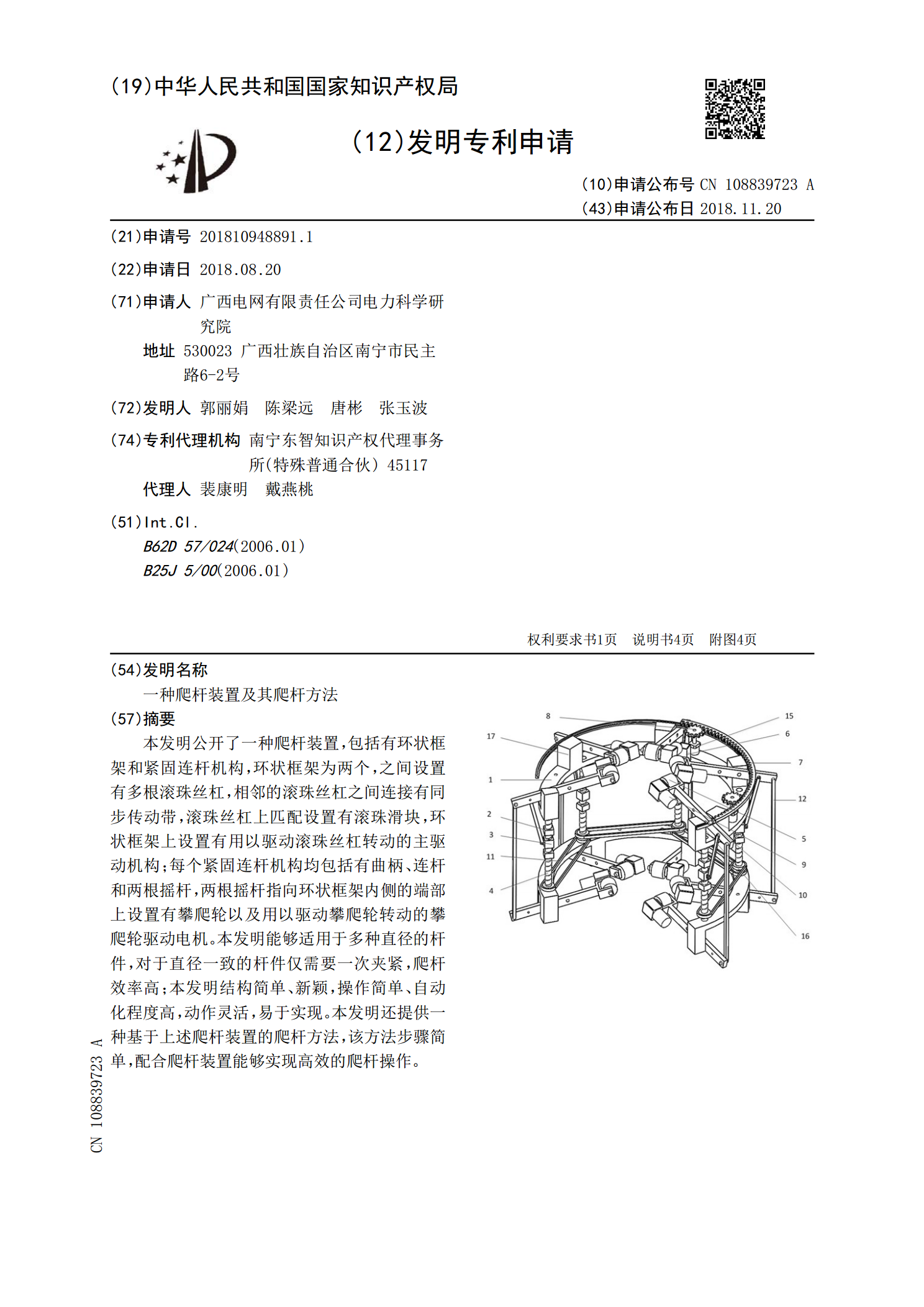
本发明公开了一种爬杆装置,包括有环状框架和紧固连杆机构,环状框架为两个,之间设置有多根滚珠丝杠,相邻的滚珠丝杠之间连接有同步传动带,滚珠丝杠上匹配设置有滚珠滑块,环状框架上设置有用以驱动滚珠丝杠转动的主驱动机构;每个紧固连杆机构均包括有曲柄、连杆和两根摇杆,两根摇杆指向环状框架内侧的端部上设置有攀爬轮以及用以驱动攀爬轮转动的攀爬轮驱动电机。本发明能够适用于多种直径的杆件,对于直径一致的杆件仅需要一次夹紧,爬杆效率高;本发明结构简单、新颖,操作简单、自动化程度高,动作灵活,易于实现。本发明还提供一种基于上述

一种脚扣爬杆器收纳装置.pdf
本实用新型涉及一种脚扣爬杆器收纳装置,包括货架固定件、外管、内管、活动横梁管及固定横梁管,所述内管套在外管内,能够伸缩调节以适应不同长度的货架,所述货架固定件安装在外管与内管的外端,所述货架固定件放置在货架上,所述固定横梁管安装在活动横梁管上,所述活动横梁管安装在外管上。本实用新型的优点:不仅有效的利用了货架的空间,可以更大限度的放置脚扣爬杆器,还可以保证分组储存,且避免了脚扣爬杆器绑扎带附件的相互干扰,避免出错结构简单且实用性强。

一种落杆式自动爬杆机器装置及其方法.pdf
本发明公开了一种落杆式自动爬杆机器装置及其方法,包括以下步骤:1)地面直行:打开控制开关,直行至爬杆底部,进入爬杆位置,即爬杆位于U型槽的半圆形槽底中,水平运动停止;2)固定爬杆:通过舵机控制杆释放落杆,倒在落杆搭载台的平台上,由丝杠控制落杆夹紧,将爬杆固定在由落杆和U型槽围成的封闭圈中;3)竖直沿杆爬行:由电机驱动动轮装置运行,带动底盘沿竖直方向进行爬杆。本发明提供的落杆式自动爬杆机器装置及其方法,相对于现有技术,具有优势如下:加工、控制、使用简便,成本低廉,且可以搭载较多其他模块,实现不同的功能。
一种自锁式便调爬杆脚扣.pdf
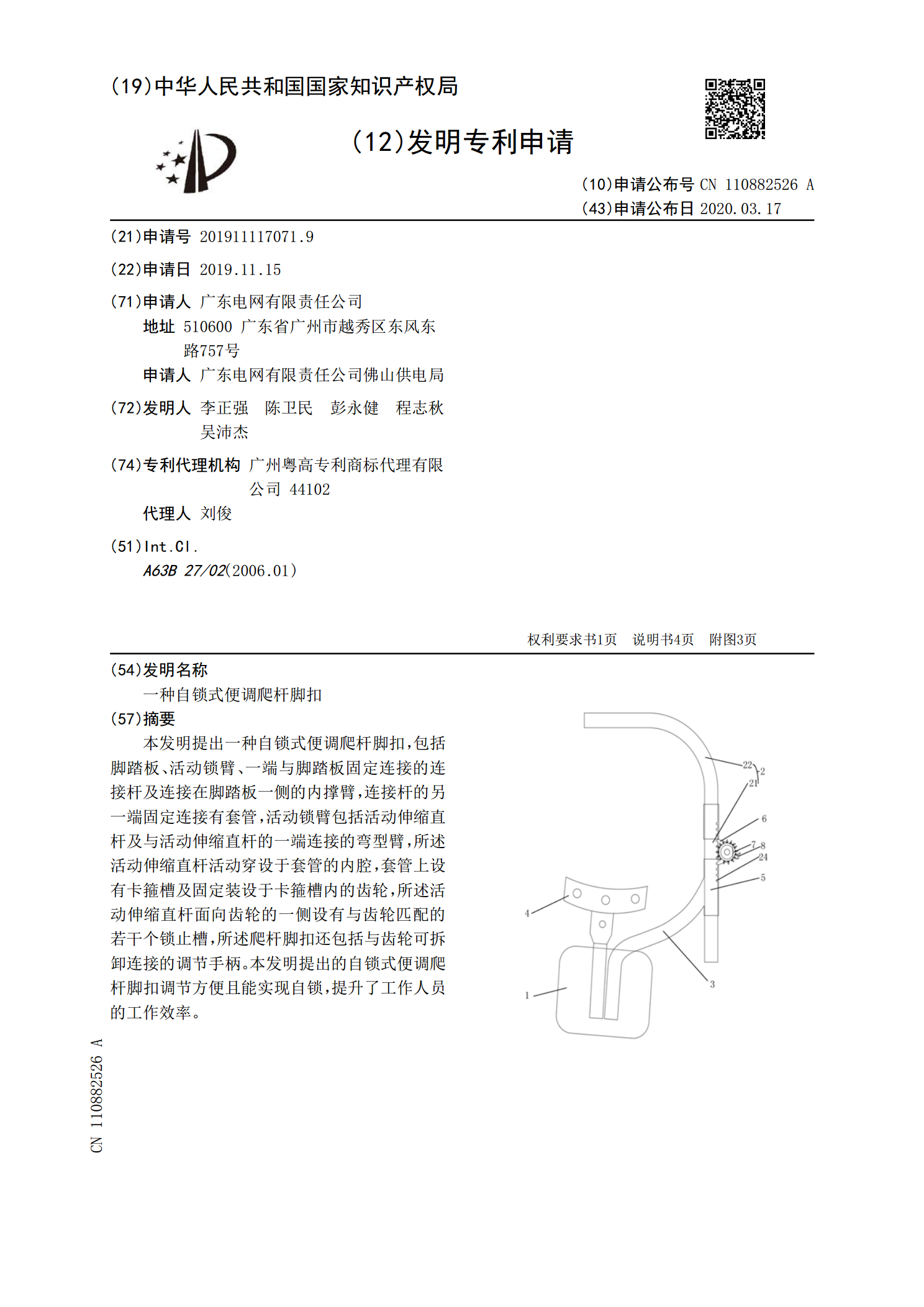
本发明提出一种自锁式便调爬杆脚扣,包括脚踏板、活动锁臂、一端与脚踏板固定连接的连接杆及连接在脚踏板一侧的内撑臂,连接杆的另一端固定连接有套管,活动锁臂包括活动伸缩直杆及与活动伸缩直杆的一端连接的弯型臂,所述活动伸缩直杆活动穿设于套管的内腔,套管上设有卡箍槽及固定装设于卡箍槽内的齿轮,所述活动伸缩直杆面向齿轮的一侧设有与齿轮匹配的若干个锁止槽,所述爬杆脚扣还包括与齿轮可拆卸连接的调节手柄。本发明提出的自锁式便调爬杆脚扣调节方便且能实现自锁,提升了工作人员的工作效率。