
具有容错控制功能的盘式轮毂电机驱动车辆控制方法.pdf

明轩****la


1/10
2/10

3/10

4/10
5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
具有容错控制功能的盘式轮毂电机驱动车辆控制方法.pdf
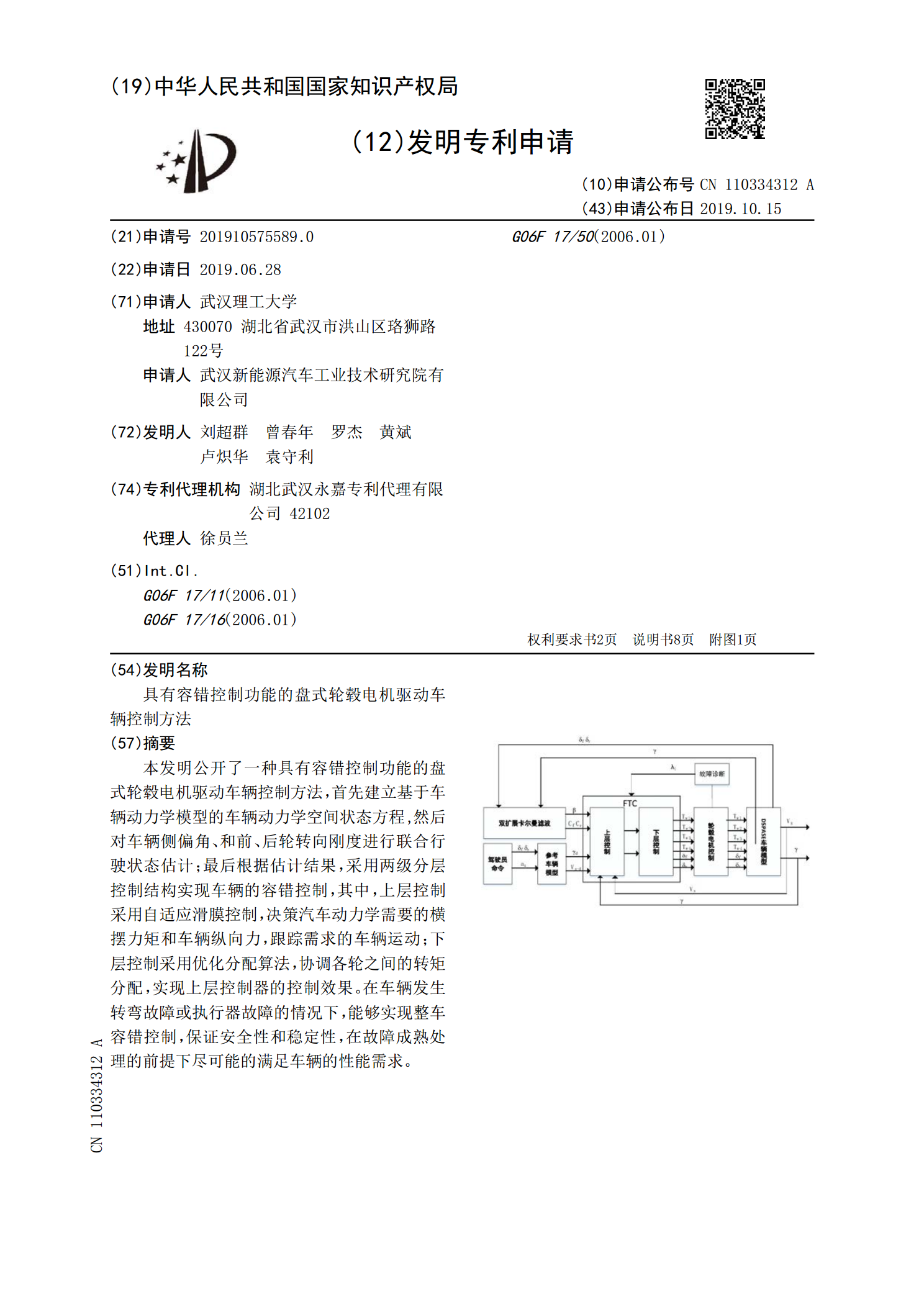
本发明公开了一种具有容错控制功能的盘式轮毂电机驱动车辆控制方法,首先建立基于车辆动力学模型的车辆动力学空间状态方程,然后对车辆侧偏角、和前、后轮转向刚度进行联合行驶状态估计;最后根据估计结果,采用两级分层控制结构实现车辆的容错控制,其中,上层控制采用自适应滑膜控制,决策汽车动力学需要的横摆力矩和车辆纵向力,跟踪需求的车辆运动;下层控制采用优化分配算法,协调各轮之间的转矩分配,实现上层控制器的控制效果。在车辆发生转弯故障或执行器故障的情况下,能够实现整车容错控制,保证安全性和稳定性,在故障成熟处理的前提下尽
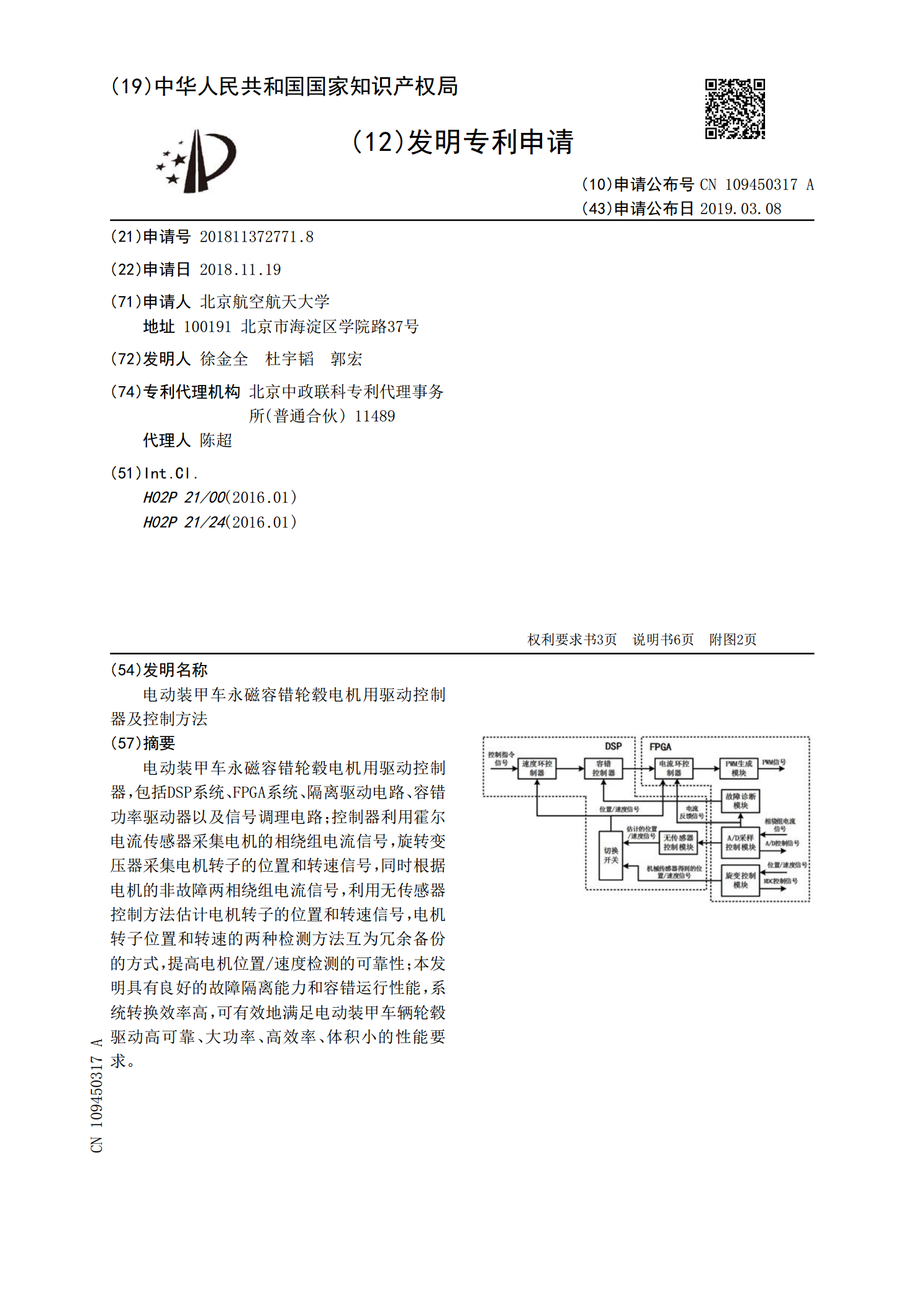
电动装甲车永磁容错轮毂电机用驱动控制器及控制方法.pdf
电动装甲车永磁容错轮毂电机用驱动控制器,包括DSP系统、FPGA系统、隔离驱动电路、容错功率驱动器以及信号调理电路;控制器利用霍尔电流传感器采集电机的相绕组电流信号,旋转变压器采集电机转子的位置和转速信号,同时根据电机的非故障两相绕组电流信号,利用无传感器控制方法估计电机转子的位置和转速信号,电机转子位置和转速的两种检测方法互为冗余备份的方式,提高电机位置/速度检测的可靠性;本发明具有良好的故障隔离能力和容错运行性能,系统转换效率高,可有效地满足电动装甲车辆轮毂驱动高可靠、大功率、高效率、体积小的性能要求
一种用于轮毂电机驱动车辆的蠕行控制方法.pdf
本发明提出了一种用于轮毂电机驱动车辆的蠕行控制方法,属于车辆动力学控制领域。该方法首先根据设定的最大蠕行坡度、起步时间和蠕行车速来确定最大蠕行扭矩限值、蠕行扭矩速度比例系数和蠕行目标车速,其中,将蠕行起步分为两阶段;然后通过确定的最大蠕行扭矩限值、蠕行扭矩速度比例系数和蠕行目标车速,采用带限值的比例控制计算得到各车轮的总扭矩,实现对车辆的蠕行控制。本发明既能保证蠕行起步时间满足要求,同时在起步过程中,在一定坡度下不溜坡、车速不超调,且车速与扭矩一致收敛,起步具有较好的平顺性,特别是针对质量较大的电动客车,
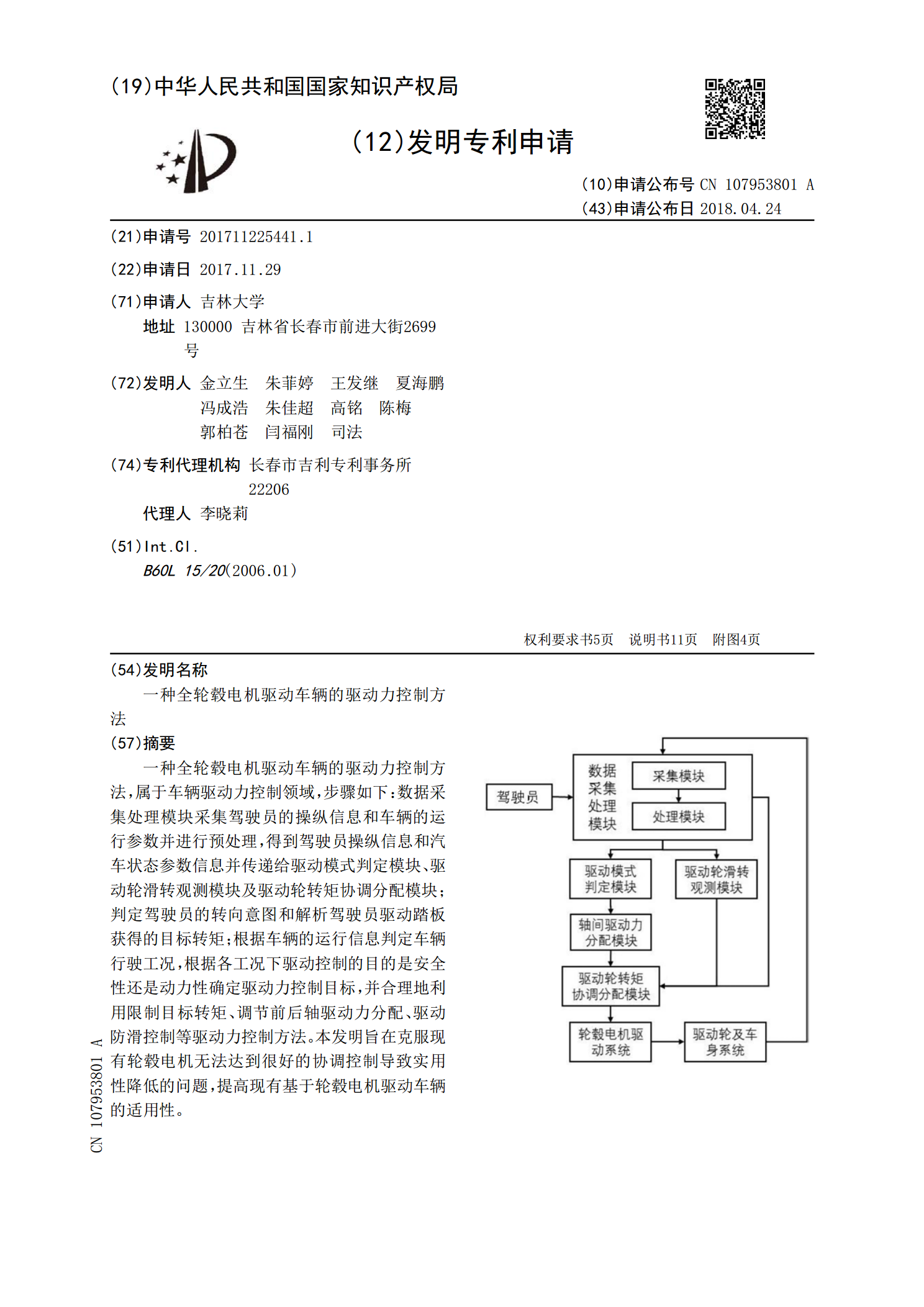
一种全轮毂电机驱动车辆的驱动力控制方法.pdf
一种全轮毂电机驱动车辆的驱动力控制方法,属于车辆驱动力控制领域,步骤如下:数据采集处理模块采集驾驶员的操纵信息和车辆的运行参数并进行预处理,得到驾驶员操纵信息和汽车状态参数信息并传递给驱动模式判定模块、驱动轮滑转观测模块及驱动轮转矩协调分配模块;判定驾驶员的转向意图和解析驾驶员驱动踏板获得的目标转矩;根据车辆的运行信息判定车辆行驶工况,根据各工况下驱动控制的目的是安全性还是动力性确定驱动力控制目标,并合理地利用限制目标转矩、调节前后轴驱动力分配、驱动防滑控制等驱动力控制方法。本发明旨在克服现有轮毂电机无法
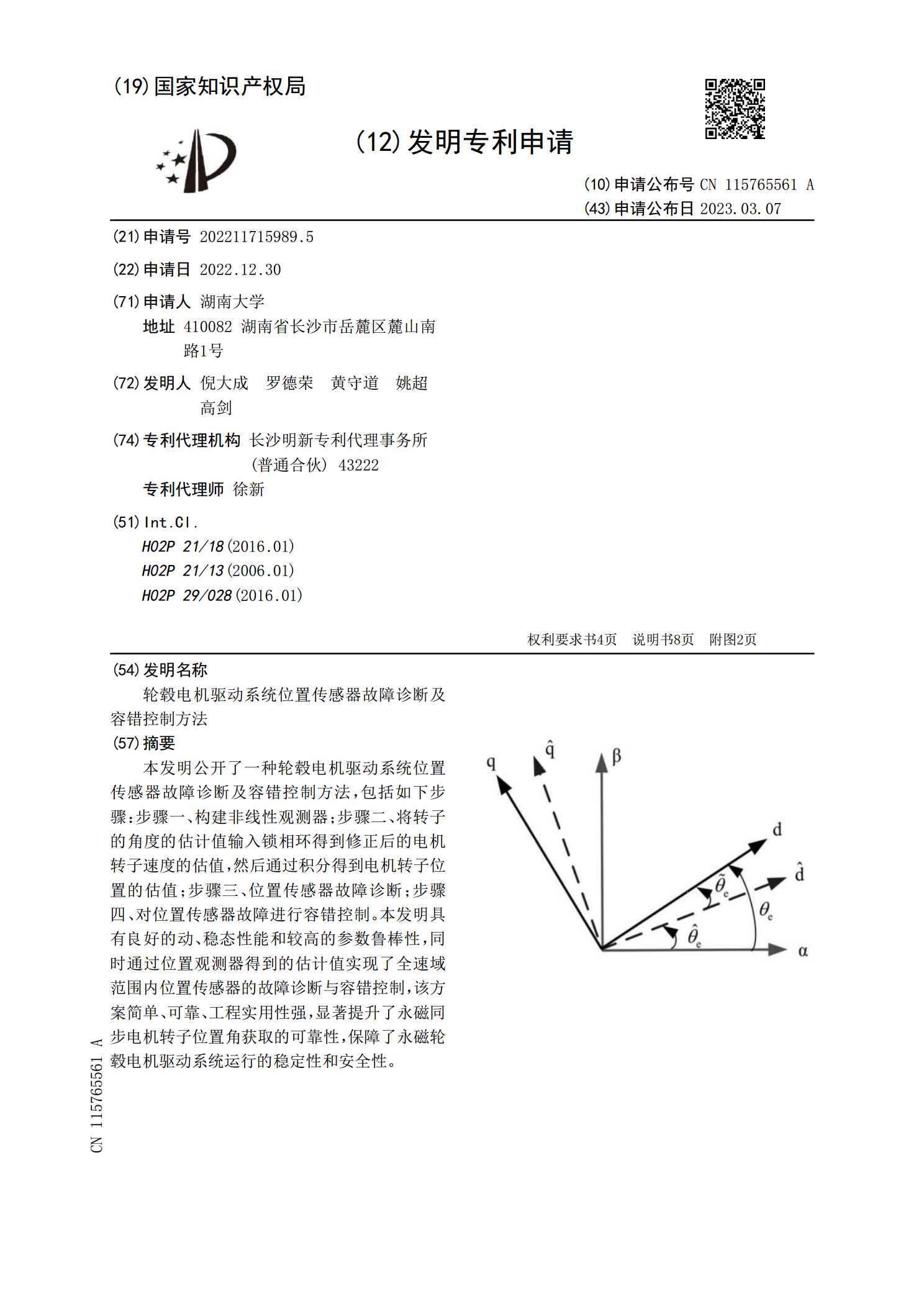
轮毂电机驱动系统位置传感器故障诊断及容错控制方法.pdf
本发明公开了一种轮毂电机驱动系统位置传感器故障诊断及容错控制方法,包括如下步骤:步骤一、构建非线性观测器;步骤二、将转子的角度的估计值输入锁相环得到修正后的电机转子速度的估值,然后通过积分得到电机转子位置的估值;步骤三、位置传感器故障诊断;步骤四、对位置传感器故障进行容错控制。本发明具有良好的动、稳态性能和较高的参数鲁棒性,同时通过位置观测器得到的估计值实现了全速域范围内位置传感器的故障诊断与容错控制,该方案简单、可靠、工程实用性强,显著提升了永磁同步电机转子位置角获取的可靠性,保障了永磁轮毂电机驱动系统