
一种用于轮毂电机驱动车辆的蠕行控制方法.pdf

大渊****公主


1/10

2/10

3/10

4/10

5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种用于轮毂电机驱动车辆的蠕行控制方法.pdf
本发明提出了一种用于轮毂电机驱动车辆的蠕行控制方法,属于车辆动力学控制领域。该方法首先根据设定的最大蠕行坡度、起步时间和蠕行车速来确定最大蠕行扭矩限值、蠕行扭矩速度比例系数和蠕行目标车速,其中,将蠕行起步分为两阶段;然后通过确定的最大蠕行扭矩限值、蠕行扭矩速度比例系数和蠕行目标车速,采用带限值的比例控制计算得到各车轮的总扭矩,实现对车辆的蠕行控制。本发明既能保证蠕行起步时间满足要求,同时在起步过程中,在一定坡度下不溜坡、车速不超调,且车速与扭矩一致收敛,起步具有较好的平顺性,特别是针对质量较大的电动客车,

一种用于重型轮毂电机车辆的陡坡蠕行控制方法.pdf
本发明提出了一种用于重型轮毂电机车辆的陡坡蠕行控制方法,属于车辆动力学控制领域。该方法利用蠕行控制状态机将蠕行控制划分为停止状态,正常蠕行状态,陡坡蠕行状态和过渡状态;并且利用车辆静止状态下的车辆姿态传感器测得坡度角,结合车速和制动踏板开度,确定蠕行控制进入何种状态。在正常蠕行状态中,使用带限值的比例控制计算蠕行扭矩。在陡坡蠕行状态中,控制参数根据测量的坡度进行调整,实现对车辆在陡坡道路的蠕行控制。在过渡状态中,采用正常蠕行扭矩与陡坡蠕行扭矩的加权平均值作为蠕行扭矩。本发明能够在电机能力范围内的坡道上,保

一种用于轮毂电机驱动车辆的稳定性控制方法.pdf
本发明提供了一种用于轮毂电机驱动车辆的稳定性控制方法,基于分层控制结构设计车辆稳定性控制策略,基于非线性滑模变结构控制实现对车速、横摆角速度和质心侧偏角的非线性联合控制,基于控制分配的方法控制电机转矩,该稳定性控制策略能够明显提高车辆的操纵稳定性,相对现有技术具有非显而易见的诸多有益效果。
一种全轮毂电机驱动车辆的驱动力控制方法.pdf
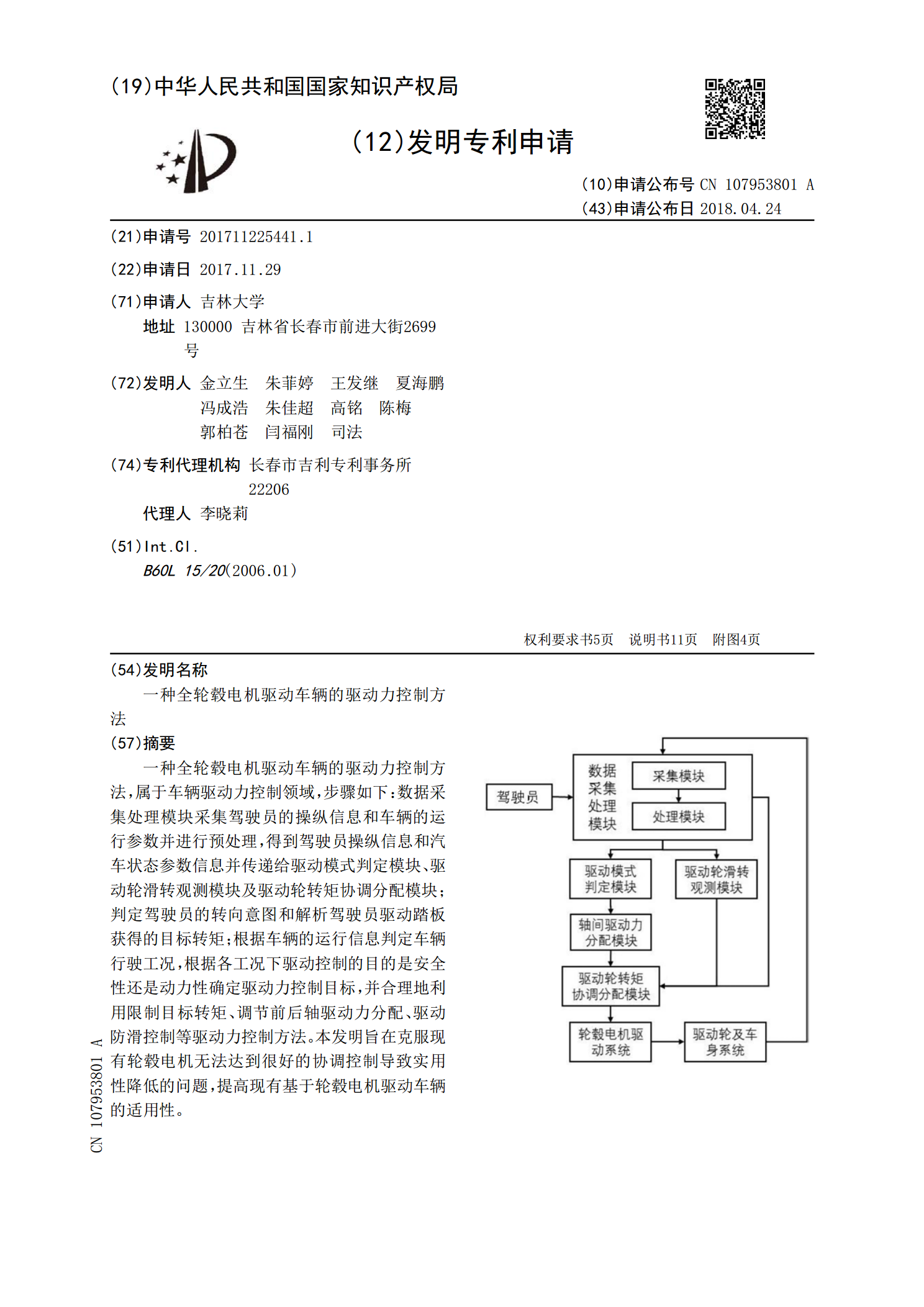
一种全轮毂电机驱动车辆的驱动力控制方法,属于车辆驱动力控制领域,步骤如下:数据采集处理模块采集驾驶员的操纵信息和车辆的运行参数并进行预处理,得到驾驶员操纵信息和汽车状态参数信息并传递给驱动模式判定模块、驱动轮滑转观测模块及驱动轮转矩协调分配模块;判定驾驶员的转向意图和解析驾驶员驱动踏板获得的目标转矩;根据车辆的运行信息判定车辆行驶工况,根据各工况下驱动控制的目的是安全性还是动力性确定驱动力控制目标,并合理地利用限制目标转矩、调节前后轴驱动力分配、驱动防滑控制等驱动力控制方法。本发明旨在克服现有轮毂电机无法

用于车辆的轮毂驱动装置及轮毂驱动车辆.pdf
本发明涉及一种用于车辆的轮毂驱动装置及轮毂驱动车辆。该轮毂驱动装置包括电机、第一减速级、第二减速级和轮毂,电机的扭矩经过第一减速级和第二减速级被传送到轮毂上,其中,将第一减速级和第二减速级设计为具有相同的旋转轴线的行星齿轮传动机构,并且第一减速级的扭矩输出端与第二减速级的扭矩输入端抗扭连接;其中,电机的转子也与第一减速级、第二减速级具有相同的旋转轴线,并且转子与第一减速级传动连接。本发明的轮毂驱动装置及轮毂驱动车辆能够通过较短的传动链获得较大的传动比,减小能量损失并提高轮毂驱动装置整体的紧凑性和稳定性。