
电动装甲车永磁容错轮毂电机用驱动控制器及控制方法.pdf

邻家****66


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
电动装甲车永磁容错轮毂电机用驱动控制器及控制方法.pdf
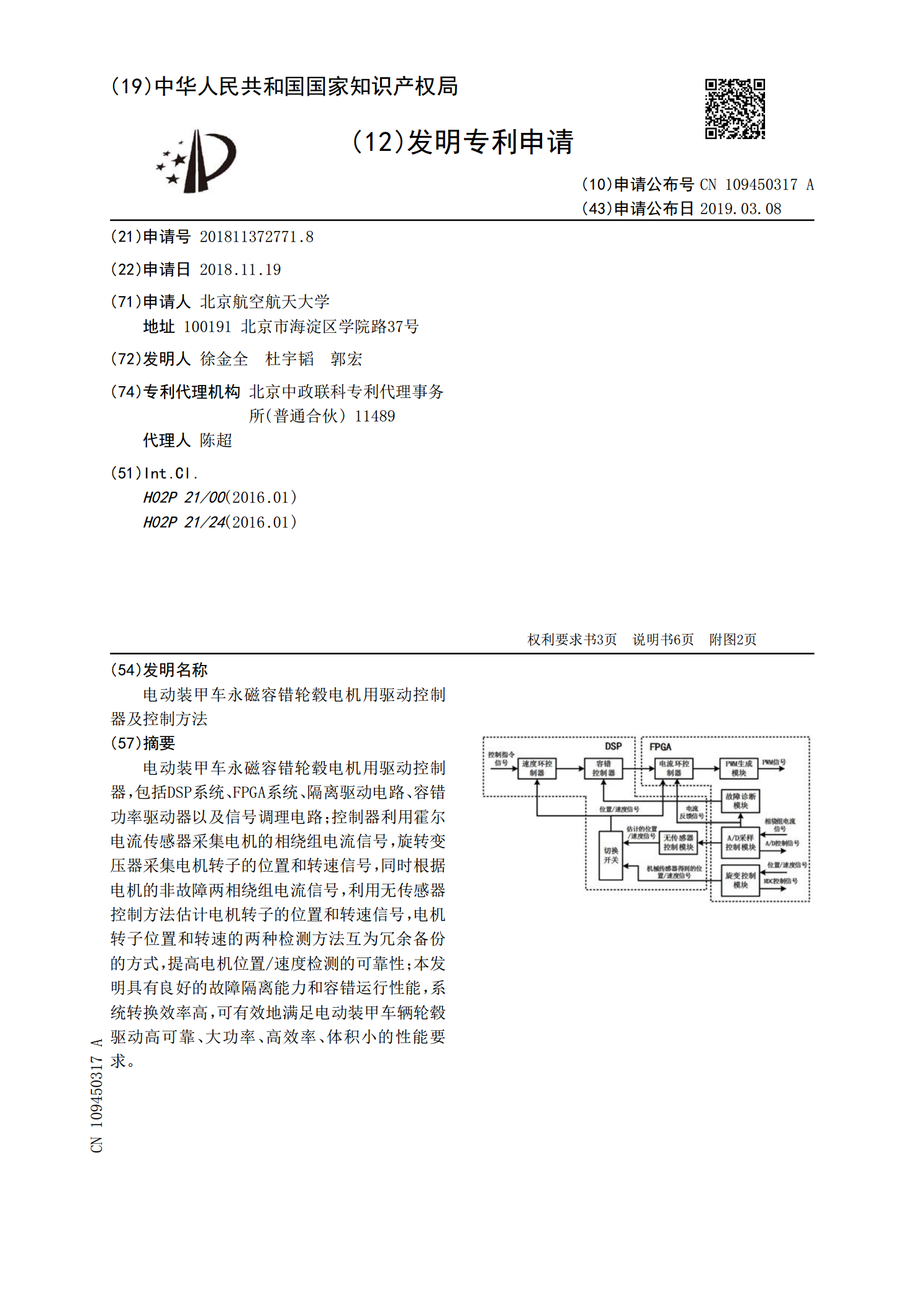
电动装甲车永磁容错轮毂电机用驱动控制器,包括DSP系统、FPGA系统、隔离驱动电路、容错功率驱动器以及信号调理电路;控制器利用霍尔电流传感器采集电机的相绕组电流信号,旋转变压器采集电机转子的位置和转速信号,同时根据电机的非故障两相绕组电流信号,利用无传感器控制方法估计电机转子的位置和转速信号,电机转子位置和转速的两种检测方法互为冗余备份的方式,提高电机位置/速度检测的可靠性;本发明具有良好的故障隔离能力和容错运行性能,系统转换效率高,可有效地满足电动装甲车辆轮毂驱动高可靠、大功率、高效率、体积小的性能要求

一种电动装甲车辆用大功率高可靠六相永磁容错轮毂电机.pdf
一种电动装甲车辆用大功率高可靠六相永磁容错轮毂电机,包括:定子组件、转子组件、转轴、轴承、机壳、前后端盖和位置传感器,定子组件中六相绕组采用隔齿嵌放的分数槽、集中单层绕组结构,使相绕组之间形成电气容错结构,同时结合定子齿槽结构尺寸设计,增大电动机相绕组电感,有效地抑制短路电流,提高了轮毂电机的可靠性和容错性能;转子组件采用内置永磁体转子结构,并在转子外侧缠绕碳纤维保护套,提高转子的机械结构强度;定子绕组采用单晶铜导线或银导线,减小轮毂电机的定子损耗;转子组件的永磁体采用偏心设计,且进行周向或轴向分段处理,

电动汽车轮毂用盘式无铁心永磁同步电机控制器及方法.pdf
一种电动汽车轮毂用盘式无铁心永磁同步电机控制器作方法,包括有控制电路和与控制电路的信号输出端相连用于驱动盘式无铁心电机的三相逆变电路,还设置有DC-DC变换电路,所述DC-DC变换电路的控制信号输入端连接控制电路的信号输出端,所述DC-DC变换电路的电流输出端通过电感L连接三相逆变电路的电流输入端,所述的盘式无铁心电机的输出轴通过一个角度传感器连接控制电路的信号输入端,所述三相逆变电路的三相输出分别通过电流传感器连接控制电路的信号输入端。本发明简单可靠,控制系统响应快,实现对电机电磁转矩的控制,为控制算法
电动车用永磁同步驱动电机控制方法的研究.pptx
,目录PartOnePartTwo电动车的发展趋势永磁同步驱动电机的应用现状研究的重要性和意义PartThree电机结构与工作原理电机控制策略的分类与特点永磁同步驱动电机的优势与挑战PartFour研究方法与技术路线实验设备与平台搭建实验过程与数据分析方法PartFive实验结果展示数据分析与处理结果对比与讨论PartSix研究结论总结对未来研究的建议与展望对实际应用的推广价值与潜在影响PartSevenTHANKS

电动汽车永磁同步电机驱动控制器的设计.docx
电动汽车永磁同步电机驱动控制器的设计电动汽车永磁同步电机驱动控制器的设计摘要:随着环境保护意识的增强和能源危机的日益严峻,电动汽车成为未来交通运输领域的重要发展方向。永磁同步电机作为电动汽车驱动系统中的核心部件,其高效、高可靠性的驱动控制器设计显得尤为重要。本文基于永磁同步电机驱动控制器的基本原理和电动汽车的需求,详细阐述了永磁同步电机驱动控制器的设计过程和关键技术,包括电机驱动模型建立、速度闭环控制、电流闭环控制等方面,为电动汽车永磁同步电机驱动控制器的研发和应用提供参考。关键词:电动汽车,永磁同步电机