
一种工业车间加工用自动化焊接机器人.pdf

玄静****写意

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种工业车间加工用自动化焊接机器人.pdf
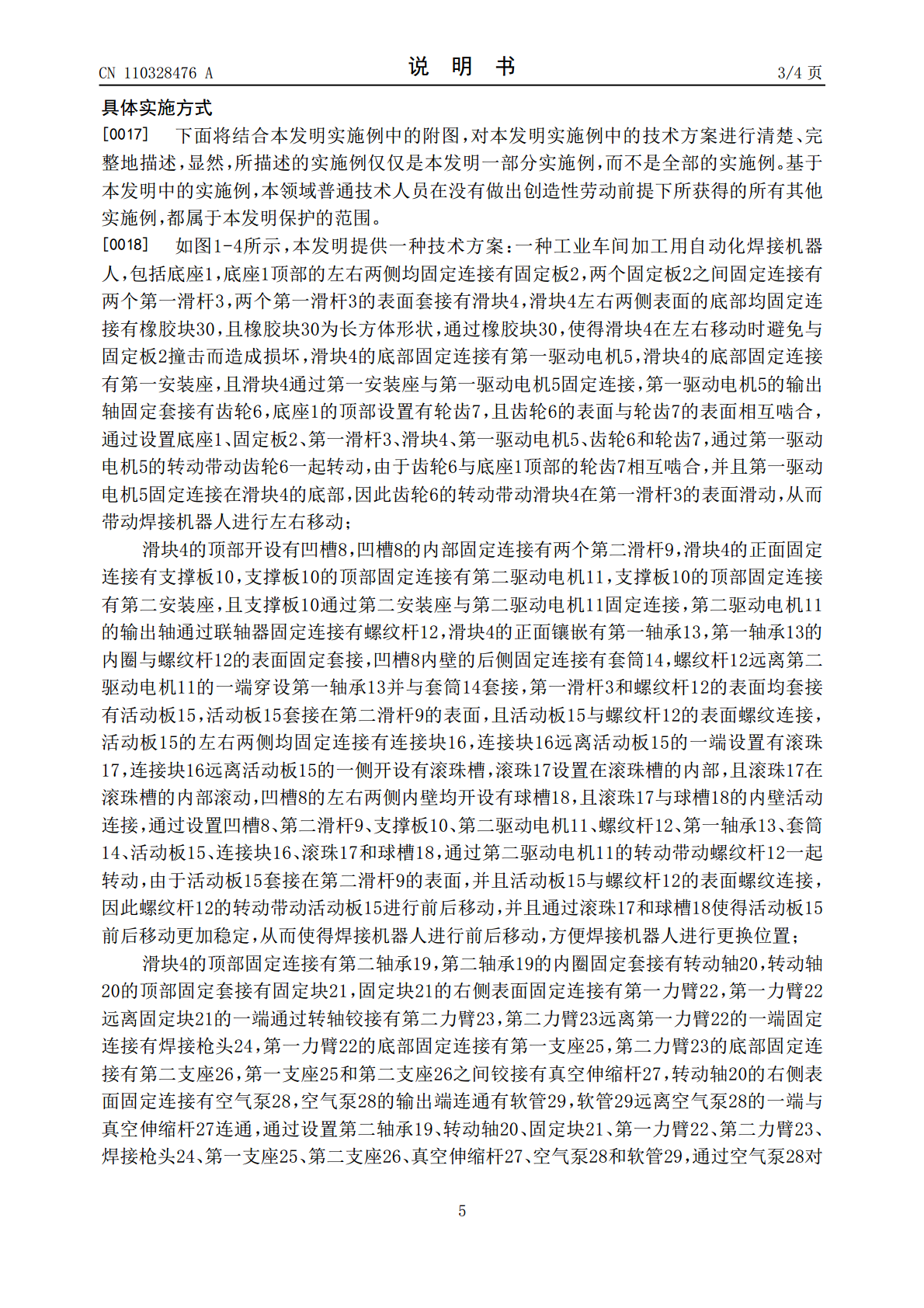
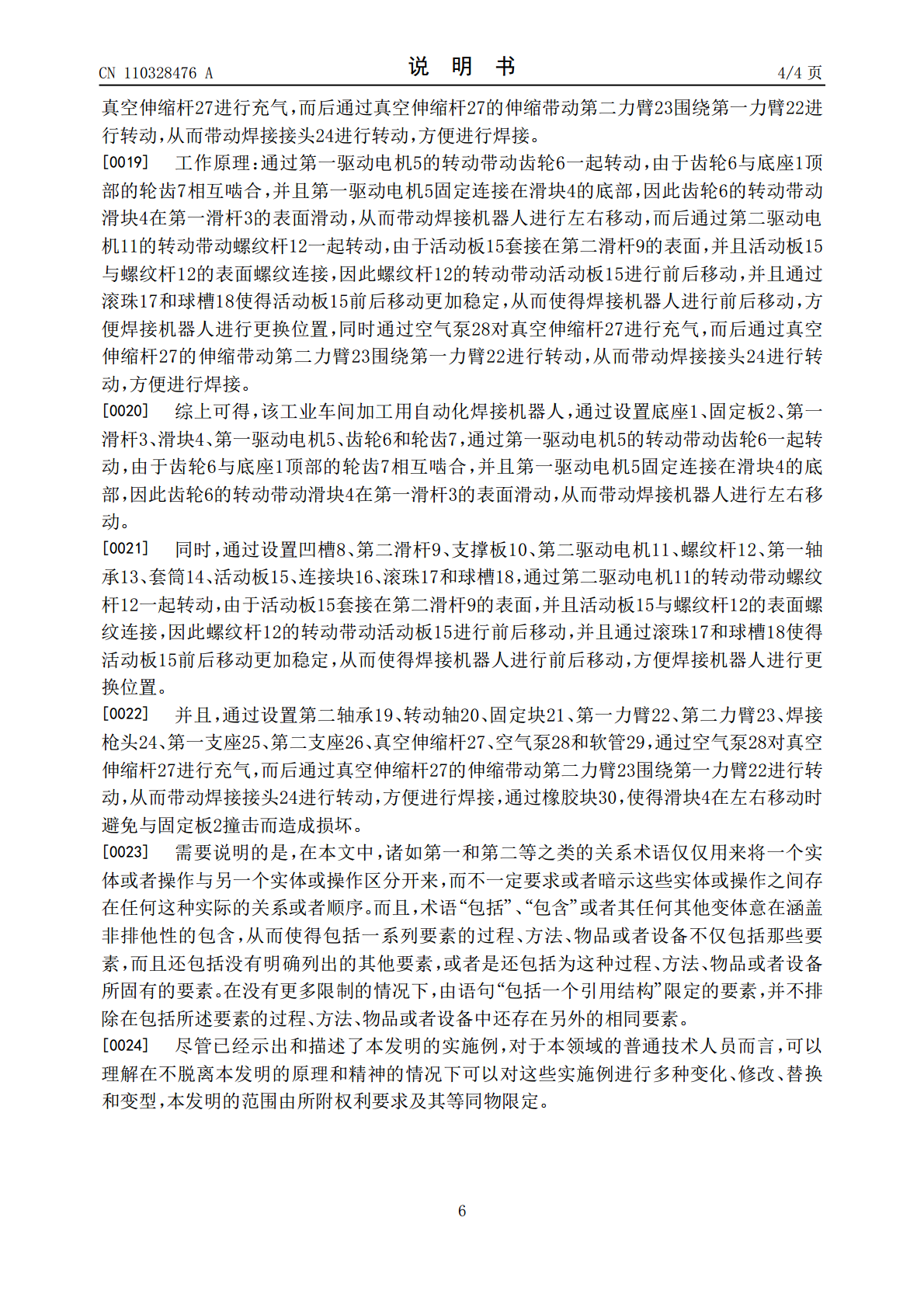
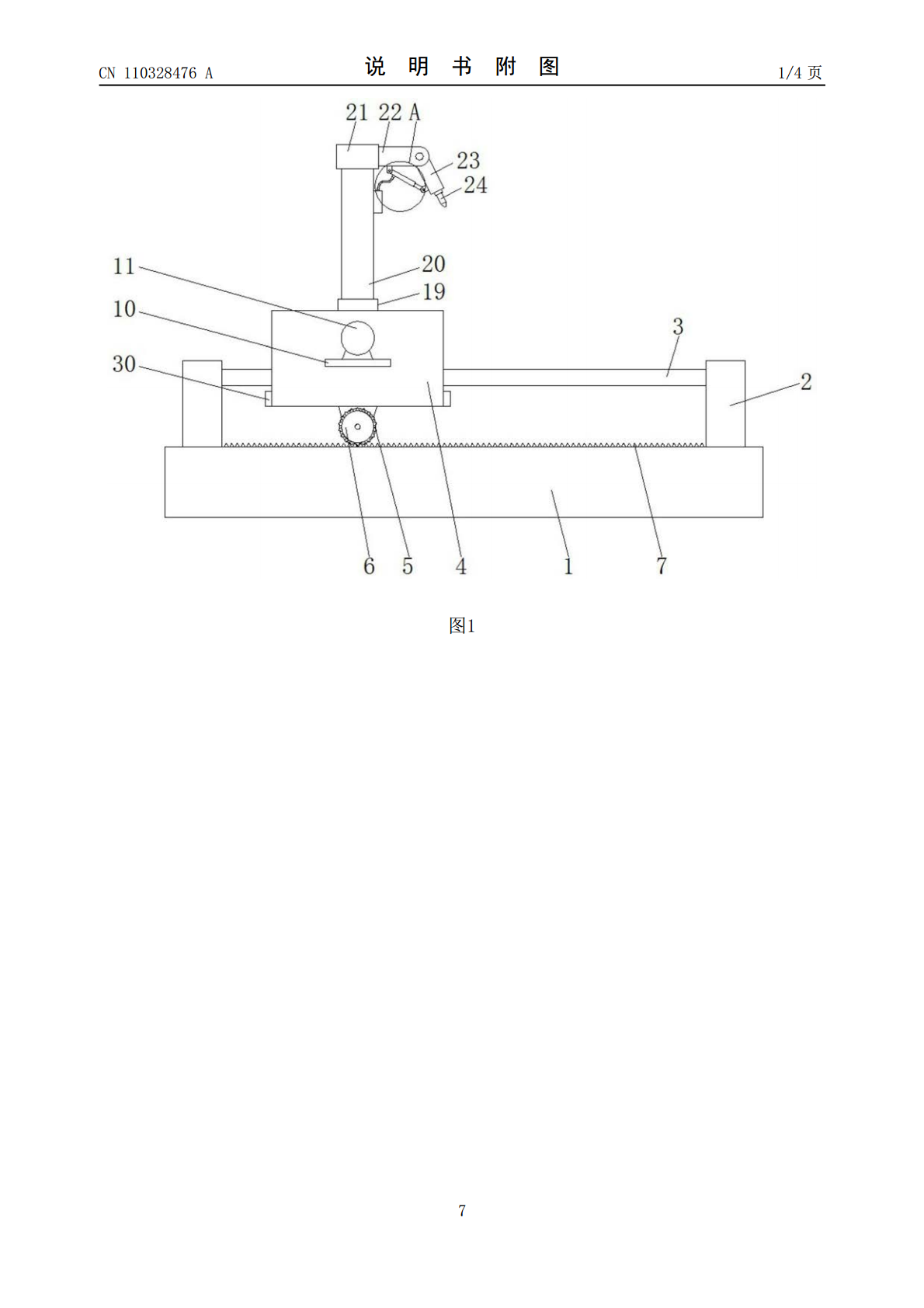
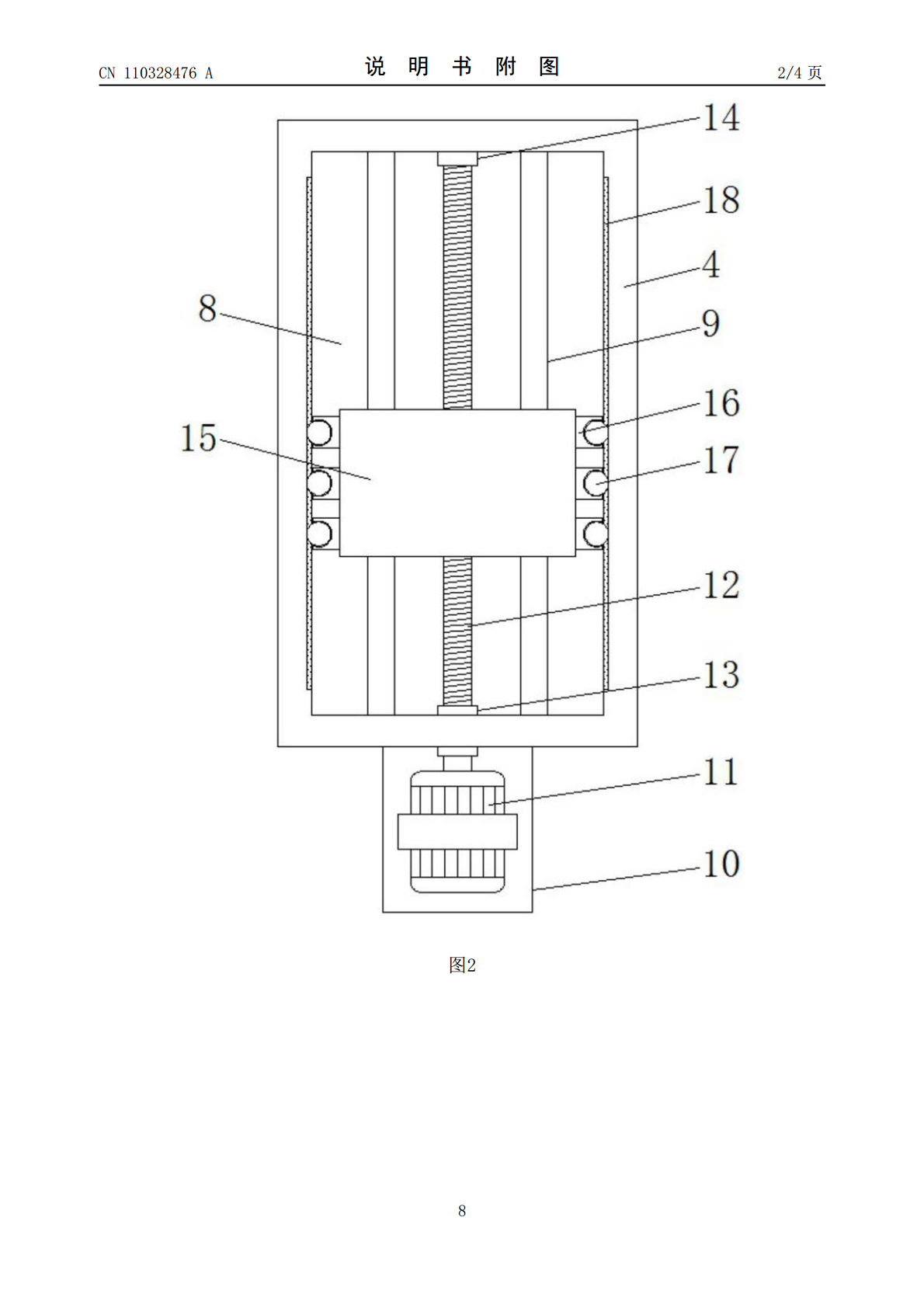
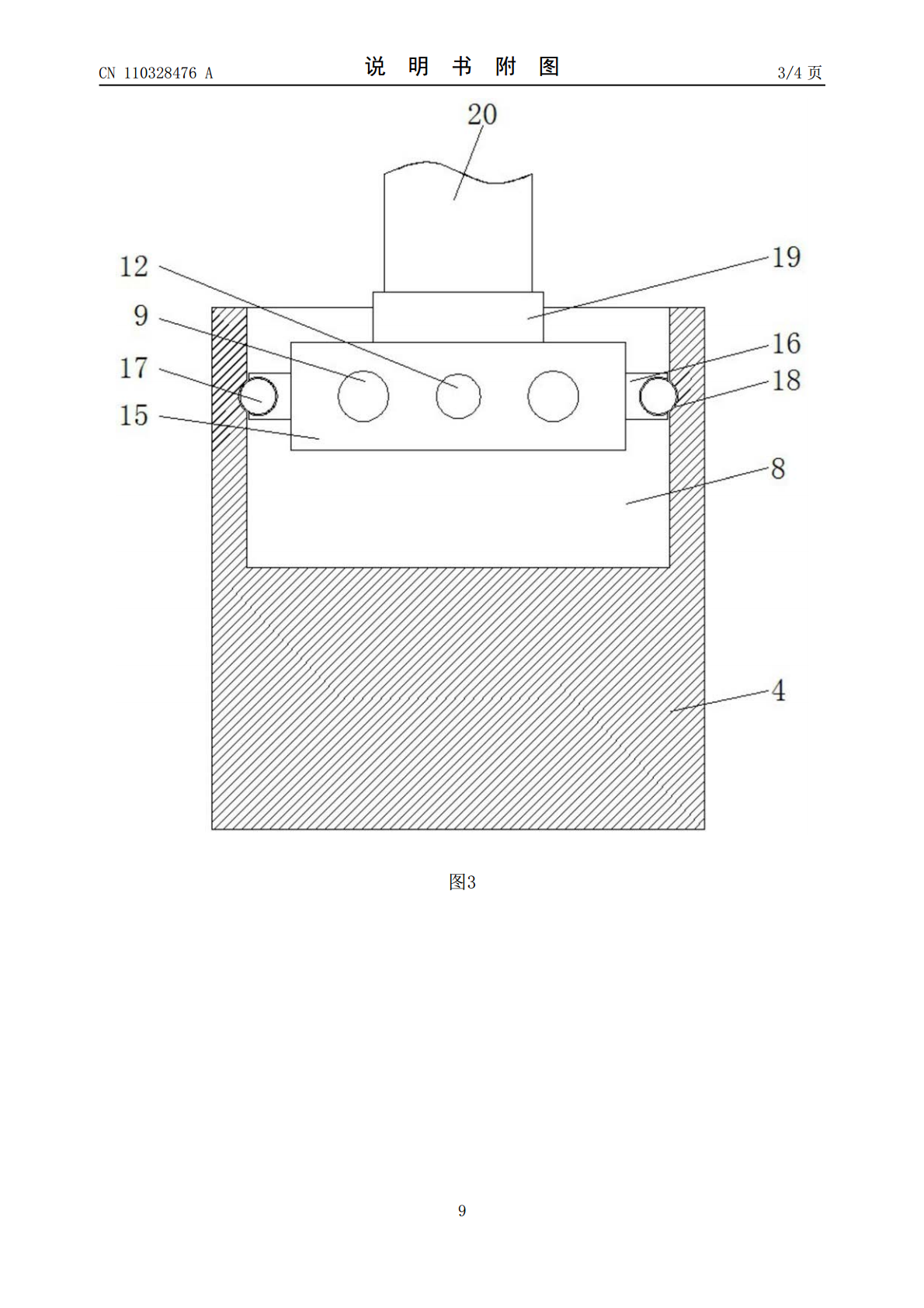
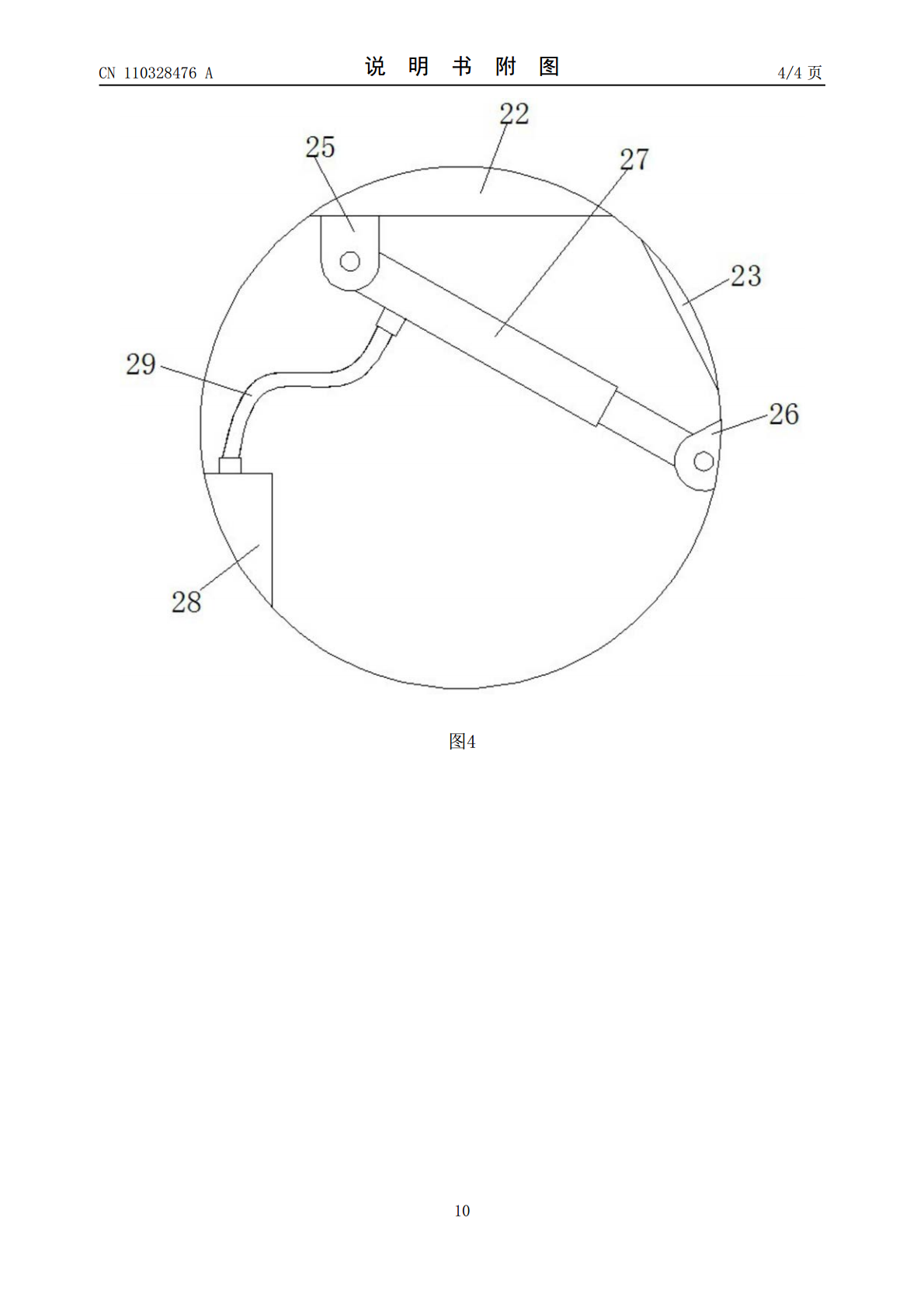
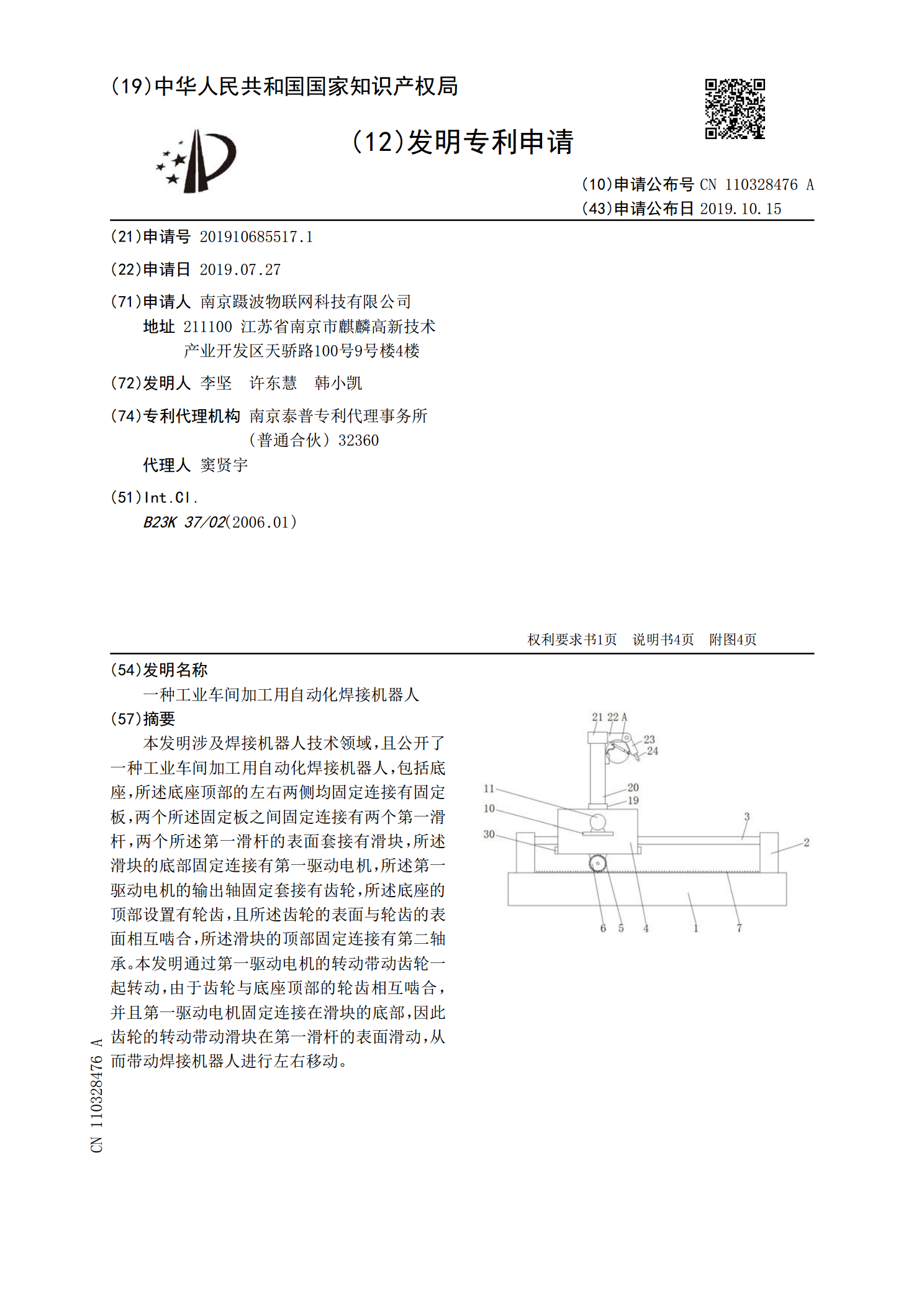
本发明涉及焊接机器人技术领域,且公开了一种工业车间加工用自动化焊接机器人,包括底座,所述底座顶部的左右两侧均固定连接有固定板,两个所述固定板之间固定连接有两个第一滑杆,两个所述第一滑杆的表面套接有滑块,所述滑块的底部固定连接有第一驱动电机,所述第一驱动电机的输出轴固定套接有齿轮,所述底座的顶部设置有轮齿,且所述齿轮的表面与轮齿的表面相互啮合,所述滑块的顶部固定连接有第二轴承。本发明通过第一驱动电机的转动带动齿轮一起转动,由于齿轮与底座顶部的轮齿相互啮合,并且第一驱动电机固定连接在滑块的底部,因此齿轮的转动
一种全方位工业自动化焊接机器人.pdf
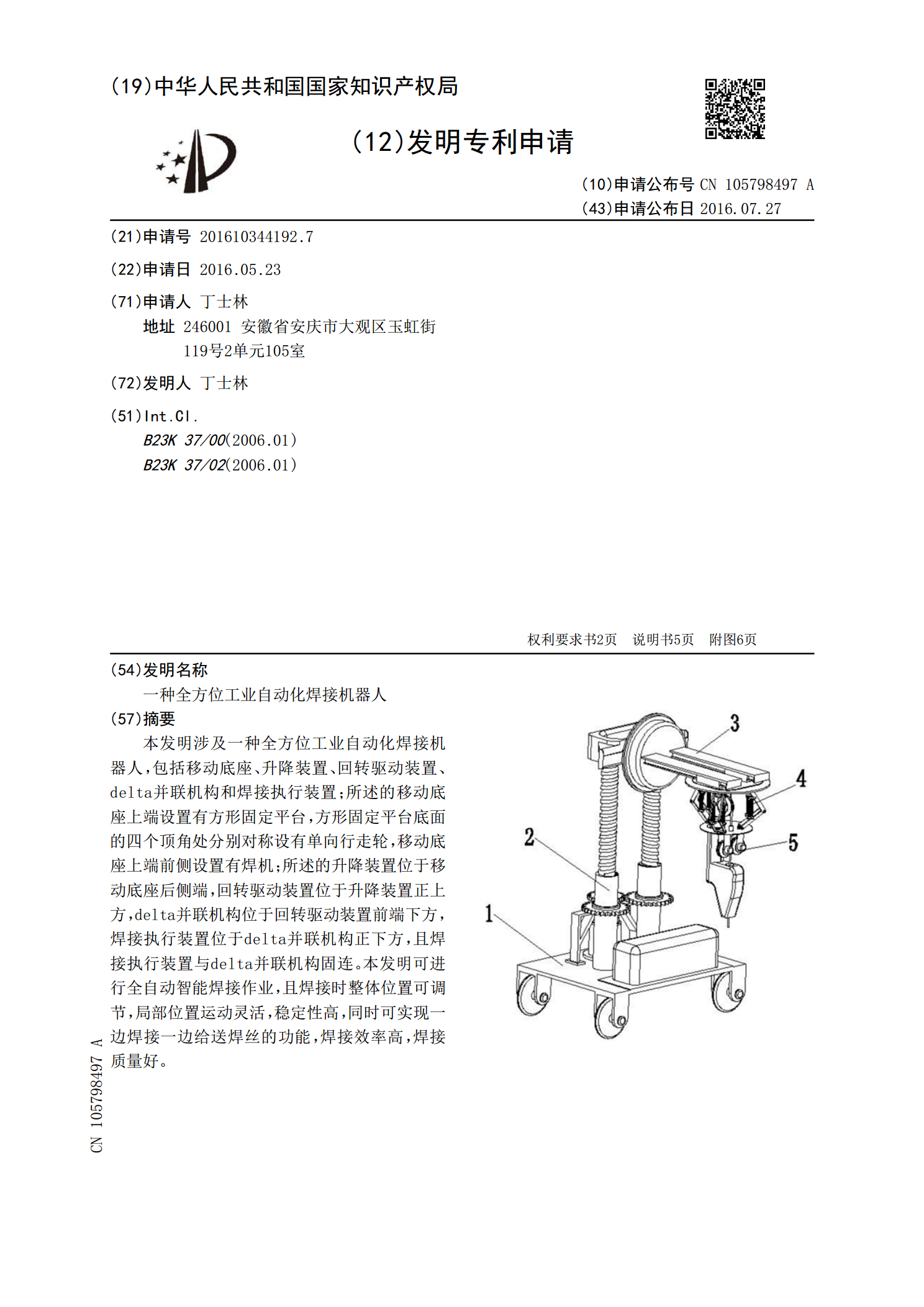
本发明涉及一种全方位工业自动化焊接机器人,包括移动底座、升降装置、回转驱动装置、delta并联机构和焊接执行装置;所述的移动底座上端设置有方形固定平台,方形固定平台底面的四个顶角处分别对称设有单向行走轮,移动底座上端前侧设置有焊机;所述的升降装置位于移动底座后侧端,回转驱动装置位于升降装置正上方,delta并联机构位于回转驱动装置前端下方,焊接执行装置位于delta并联机构正下方,且焊接执行装置与delta并联机构固连。本发明可进行全自动智能焊接作业,且焊接时整体位置可调节,局部位置运动灵活,稳定性高,同
一种工业自动化焊接装置.pdf
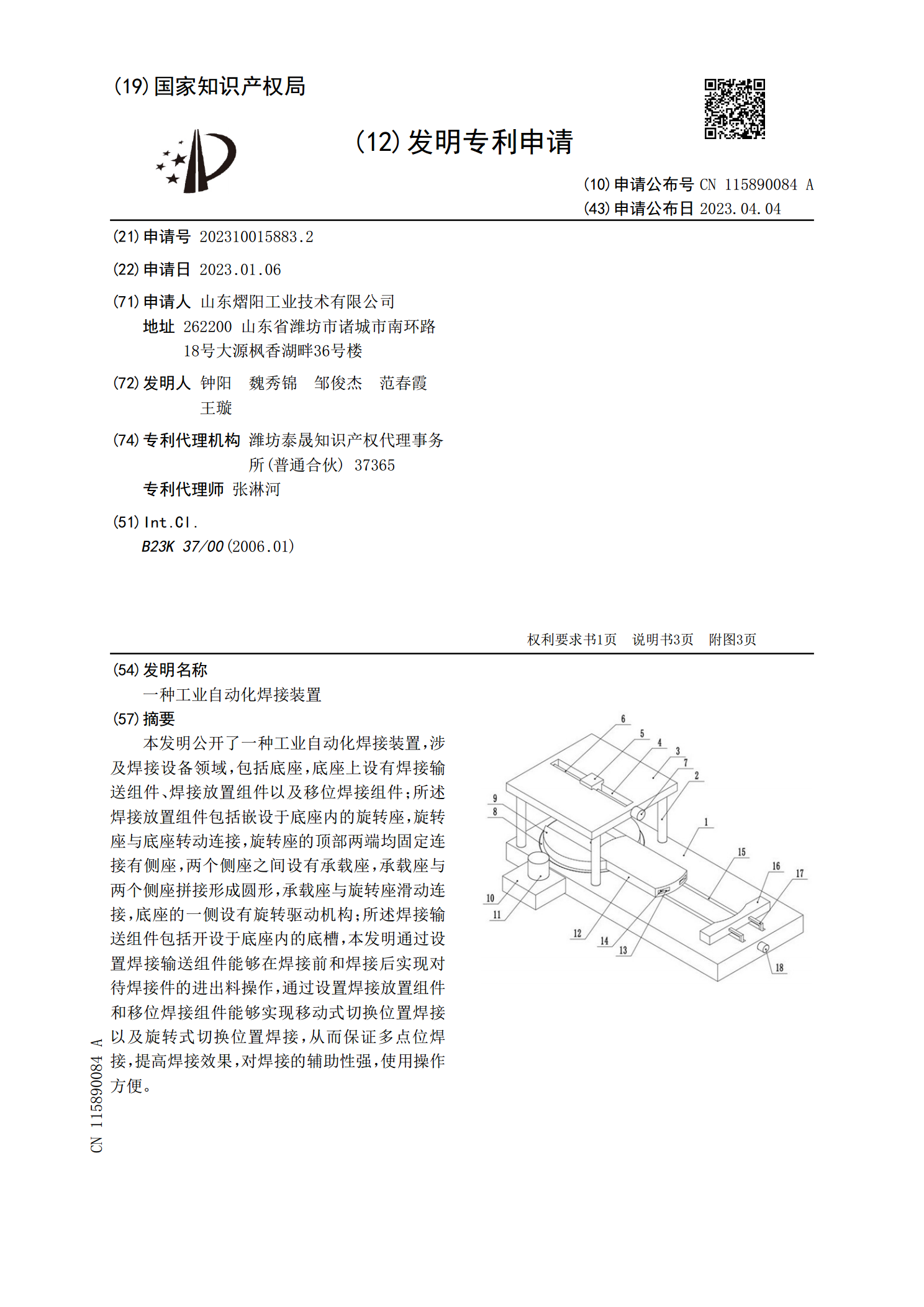
本发明公开了一种工业自动化焊接装置,涉及焊接设备领域,包括底座,底座上设有焊接输送组件、焊接放置组件以及移位焊接组件;所述焊接放置组件包括嵌设于底座内的旋转座,旋转座与底座转动连接,旋转座的顶部两端均固定连接有侧座,两个侧座之间设有承载座,承载座与两个侧座拼接形成圆形,承载座与旋转座滑动连接,底座的一侧设有旋转驱动机构;所述焊接输送组件包括开设于底座内的底槽,本发明通过设置焊接输送组件能够在焊接前和焊接后实现对待焊接件的进出料操作,通过设置焊接放置组件和移位焊接组件能够实现移动式切换位置焊接以及旋转式切换

一种工业机器人自动化加工用可调式输料限位装置.pdf
本发明公开了一种工业机器人自动化加工用可调式输料限位装置,包括:多个枕木、一对滑轨、滑动件和一对限位件;多个枕木均匀平行设置;一对滑轨设于多个枕木上,且与枕木垂直设置,一对滑轨关于枕木中轴线对称设置,滑轨的上侧设有锁止齿;滑动件滑动设于一对滑轨上,滑动件上安装有承载座,承载座用于安装工业机器人;一对限位件均设于一对滑轨上,且分别设于滑动件的两侧。本发明通过工业机器人自动化输料限位装置上相应机构的设置,可以对输料限位装置进行快速灵活的调节,使用者无需使用工具进行拆卸,提高了使用者调节限位装置的效率,进而可以

一种工业焊接机器人.pdf
本发明涉及焊接机器人技术领域,具体的说是一种工业焊接机器人,包括机械手臂以及在机械手臂上设置的焊接枪;还包括底板和防护板;所述机械手臂的固定端固定连接在底板上,所述防护板对称活动设置在底板上,其中一个所述防护板上固定连接有装料筒,所述装料筒与防护板的内部连通,所述装料筒的内侧壁上固定连接有限位块,所述限位块之间设置有载料筒,所述载料筒的内侧壁上固定连接有填料筒,所述填料筒内装有活性炭颗粒,活性炭颗粒之间预留有间隙,所述载料筒的上下端均弹性连接有挡板,所述挡板上开设有通透孔;本发明实现了在焊接过程中产生气体