
一种全方位工业自动化焊接机器人.pdf

小寄****淑k


1/10

2/10

3/10
4/10
5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种全方位工业自动化焊接机器人.pdf
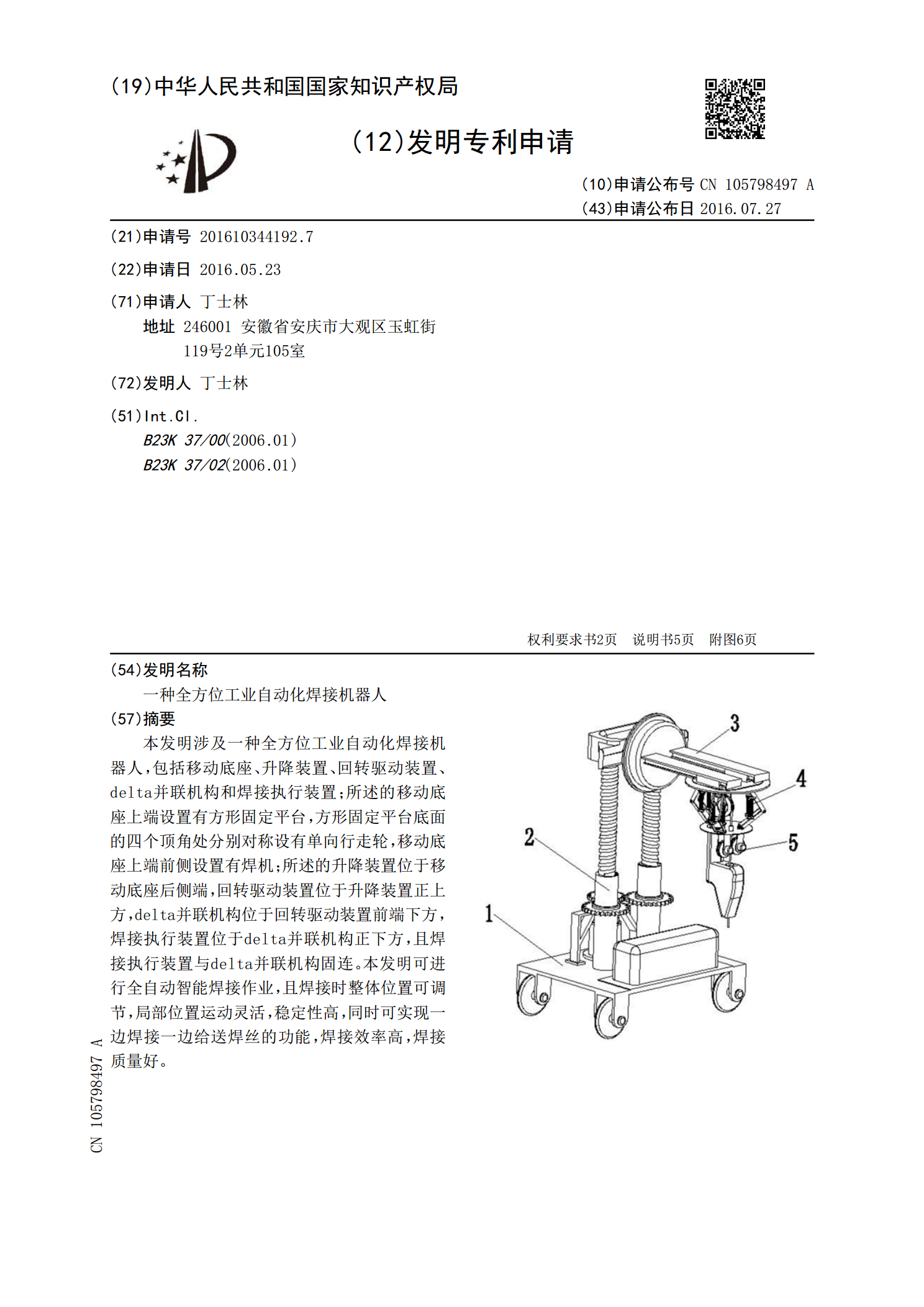
本发明涉及一种全方位工业自动化焊接机器人,包括移动底座、升降装置、回转驱动装置、delta并联机构和焊接执行装置;所述的移动底座上端设置有方形固定平台,方形固定平台底面的四个顶角处分别对称设有单向行走轮,移动底座上端前侧设置有焊机;所述的升降装置位于移动底座后侧端,回转驱动装置位于升降装置正上方,delta并联机构位于回转驱动装置前端下方,焊接执行装置位于delta并联机构正下方,且焊接执行装置与delta并联机构固连。本发明可进行全自动智能焊接作业,且焊接时整体位置可调节,局部位置运动灵活,稳定性高,同

一种全方位锂电池组工业焊接机器人.pdf
本发明公开了一种全方位锂电池组工业焊接机器人,涉及焊接机器人技术领域,包括焊接底座,焊接底座上端两侧安装有支撑架,支撑架顶端安装有顶架,焊接底座下端中部安装有电机架,电机架下端安装有竖直电机,竖直电机的输出轴通过带传动机构连接有竖直丝杆,竖直丝杆中部通过螺纹结构连接有螺纹块,螺纹块后端安装有升降块,升降块之间上下两端安装有水平导向杆,水平导向杆中部安装有移动块,移动块中部通过内螺纹孔连接有水平丝杆,移动块前端中部安装有固定齿条,固定齿条中部安装有前后移动箱。本发明,实现了焊接头的前后、左右和上下的全方位运

一种全方位焊接机器人.pdf
本发明公开了一种全方位焊接机器人,包括支撑底座、机械手爪和摩擦垫,所述支撑底座左上方连接有焊条箱,且焊条箱内部放置有焊条,所述支撑臂右侧设置有极点捕捉器,所述焊接机构内部设置有机械手爪,且机械手爪内侧连接有摩擦垫,所述焊接机构下方设置有焊接平台,所述焊接平台上方设置有推板,且其右侧安装有运输带轮。该全方位焊接机器人,结合现在普遍使用的焊接机器人进行创新设计,在原始工作原理的基础上进行创新设计,通过设置可以旋转的支撑臂和焊条箱,使得焊接机构可以自动旋转至焊条箱上,使用机械手爪进行焊条的更换,并且焊件可以通过
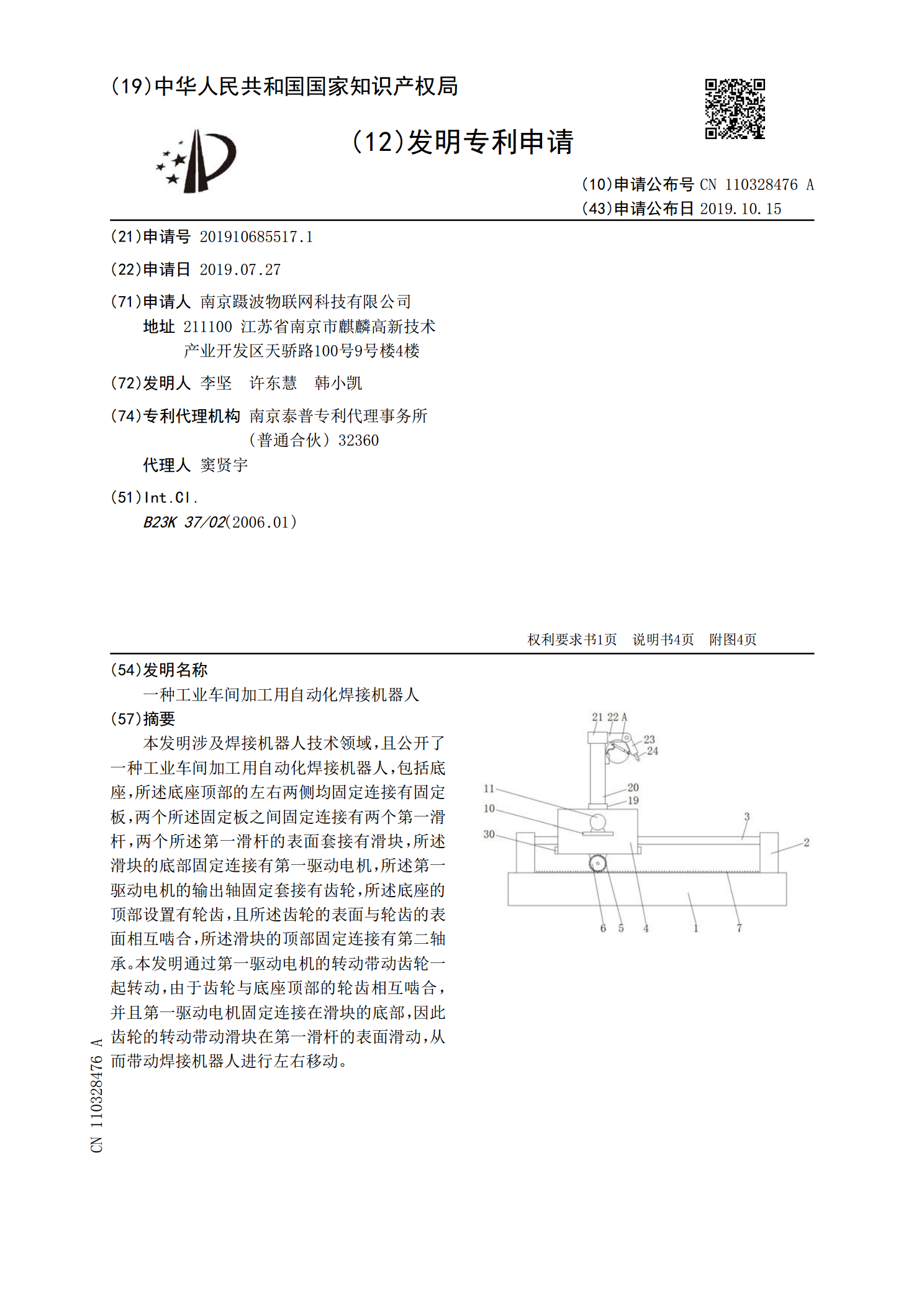
一种工业车间加工用自动化焊接机器人.pdf
本发明涉及焊接机器人技术领域,且公开了一种工业车间加工用自动化焊接机器人,包括底座,所述底座顶部的左右两侧均固定连接有固定板,两个所述固定板之间固定连接有两个第一滑杆,两个所述第一滑杆的表面套接有滑块,所述滑块的底部固定连接有第一驱动电机,所述第一驱动电机的输出轴固定套接有齿轮,所述底座的顶部设置有轮齿,且所述齿轮的表面与轮齿的表面相互啮合,所述滑块的顶部固定连接有第二轴承。本发明通过第一驱动电机的转动带动齿轮一起转动,由于齿轮与底座顶部的轮齿相互啮合,并且第一驱动电机固定连接在滑块的底部,因此齿轮的转动
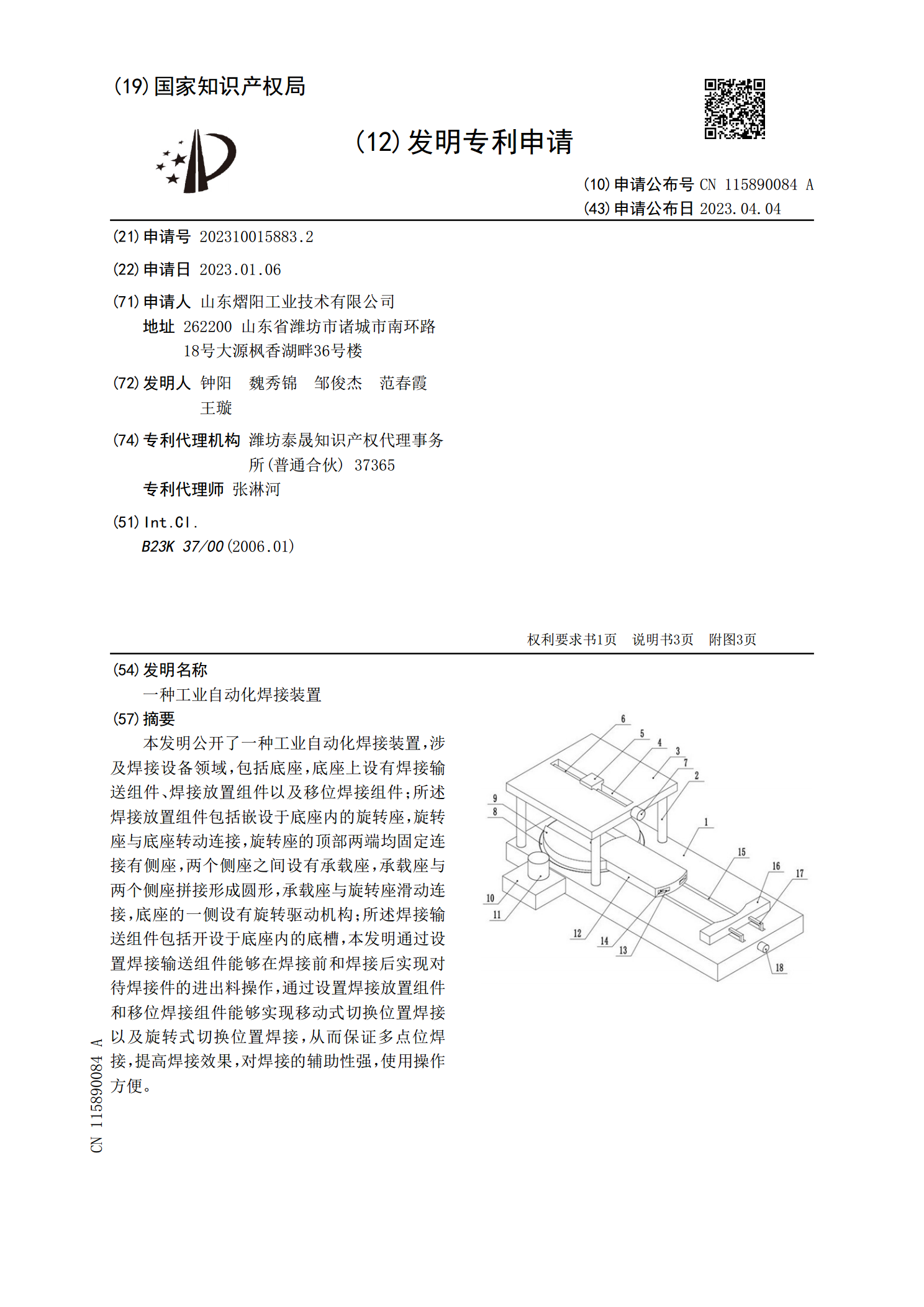
一种工业自动化焊接装置.pdf
本发明公开了一种工业自动化焊接装置,涉及焊接设备领域,包括底座,底座上设有焊接输送组件、焊接放置组件以及移位焊接组件;所述焊接放置组件包括嵌设于底座内的旋转座,旋转座与底座转动连接,旋转座的顶部两端均固定连接有侧座,两个侧座之间设有承载座,承载座与两个侧座拼接形成圆形,承载座与旋转座滑动连接,底座的一侧设有旋转驱动机构;所述焊接输送组件包括开设于底座内的底槽,本发明通过设置焊接输送组件能够在焊接前和焊接后实现对待焊接件的进出料操作,通过设置焊接放置组件和移位焊接组件能够实现移动式切换位置焊接以及旋转式切换