
车辆控制系统及其控制方法.pdf

猫巷****熙柔


1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

车辆控制系统及其控制方法.pdf
本申请实施例公开了一种车辆控制系统,包括:GPS定位模块,用于获取车辆实时位置信息;钥匙监测模块,用于检测车辆是否连接钥匙,若否,则采用所述GPS定位模块获取车辆在脱离钥匙时的初始位置信息;车辆控制模块,连接至所述GPS定位模块、钥匙监测模块,用于控制车辆;服务器,通过通信网络连接与所述车辆控制模块连接;智能终端,通过通信网络分别与所述服务器和所述车辆控制模块连接;其中,所述服务器和/或智能终端根据所述车辆的实时位置信息、初始位置信息判断车辆是否被盗,当确认被盗时,所述车辆控制模块强制制动车辆。采用本申请
车辆控制系统及其控制方法.pdf
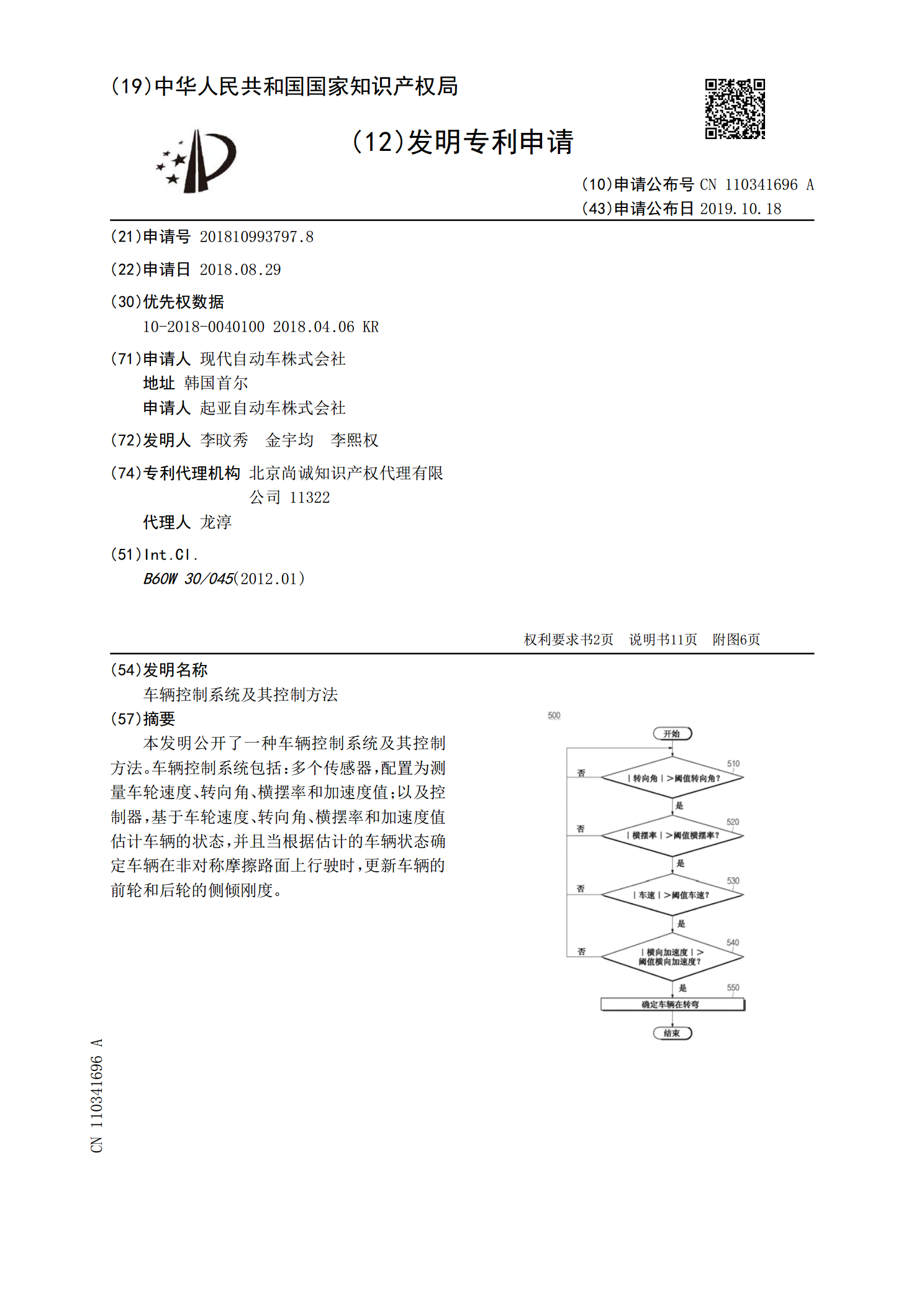
本发明公开了一种车辆控制系统及其控制方法。车辆控制系统包括:多个传感器,配置为测量车轮速度、转向角、横摆率和加速度值;以及控制器,基于车轮速度、转向角、横摆率和加速度值估计车辆的状态,并且当根据估计的车辆状态确定车辆在非对称摩擦路面上行驶时,更新车辆的前轮和后轮的侧倾刚度。
车辆控制系统及其方法.pdf
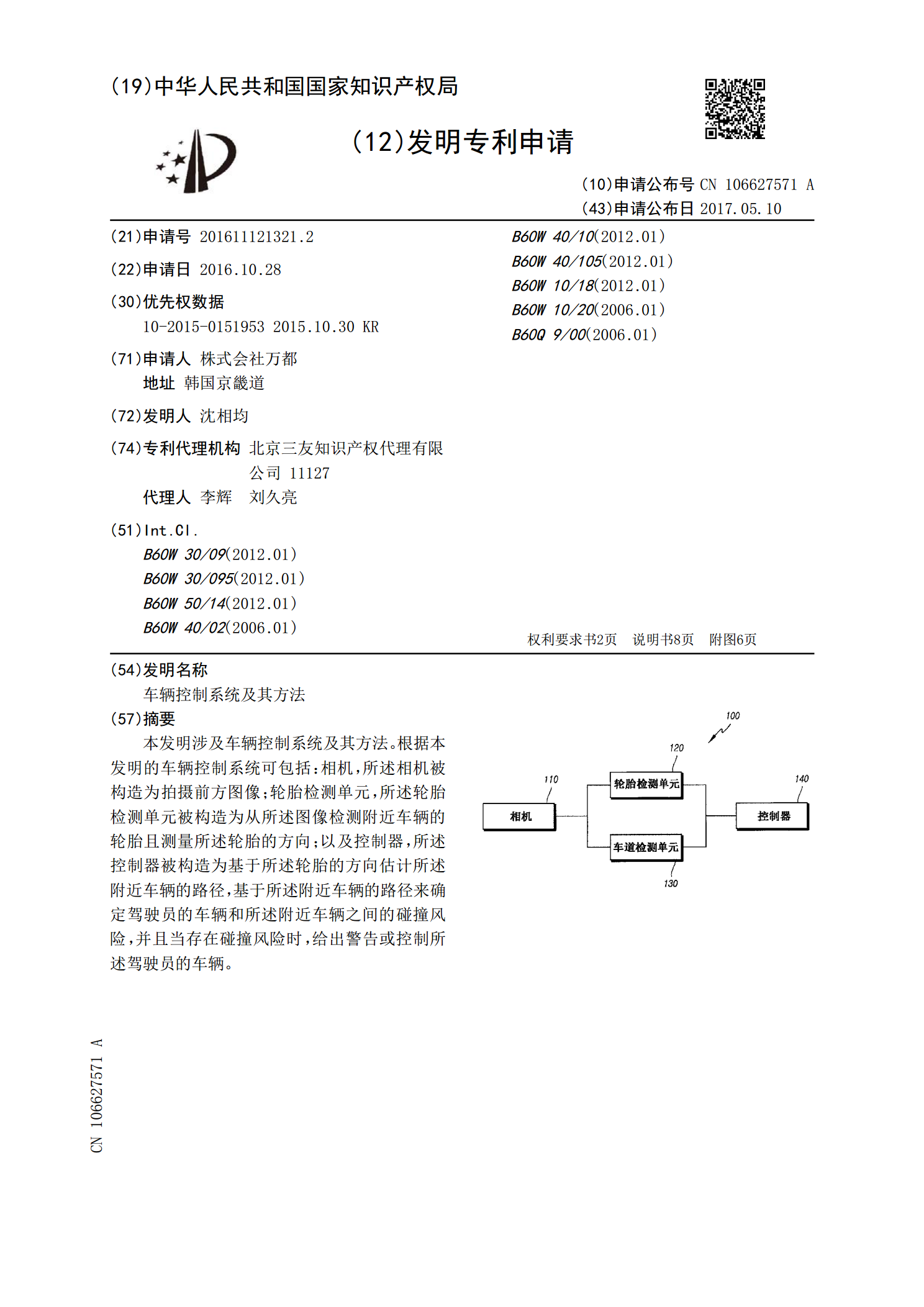
本发明涉及车辆控制系统及其方法。根据本发明的车辆控制系统可包括:相机,所述相机被构造为拍摄前方图像;轮胎检测单元,所述轮胎检测单元被构造为从所述图像检测附近车辆的轮胎且测量所述轮胎的方向;以及控制器,所述控制器被构造为基于所述轮胎的方向估计所述附近车辆的路径,基于所述附近车辆的路径来确定驾驶员的车辆和所述附近车辆之间的碰撞风险,并且当存在碰撞风险时,给出警告或控制所述驾驶员的车辆。

车辆控制系统及其方法.pdf
本申请的主要目的在于提供一种车辆控制系统及其方法,中该系统包括:扫描单元,用于车辆在行驶过程中扫描设置在路侧的交通标志;控制单元,用于当识别到所述交通标志包括对车辆速度进行限制的信息时,根据该对车辆速度进行限制的信息控制车辆的行驶速度。通过本申请能够有效提高车辆的行驶安全。

车辆控制系统及其方法.pdf
本申请公开一种车辆控制系统及其方法,其中该系统包括:水深检测单元,用于探测车辆的涉水深度;控制单元,用于如果车辆的涉水深度大于第一预设值,则发送报警信息并对车辆进行自动控制。通过本申请能够有效提高车辆的涉水通过能力。