
一种分布式有源无源混合绳索驱动系统.pdf

甲申****66

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种分布式有源无源混合绳索驱动系统.pdf
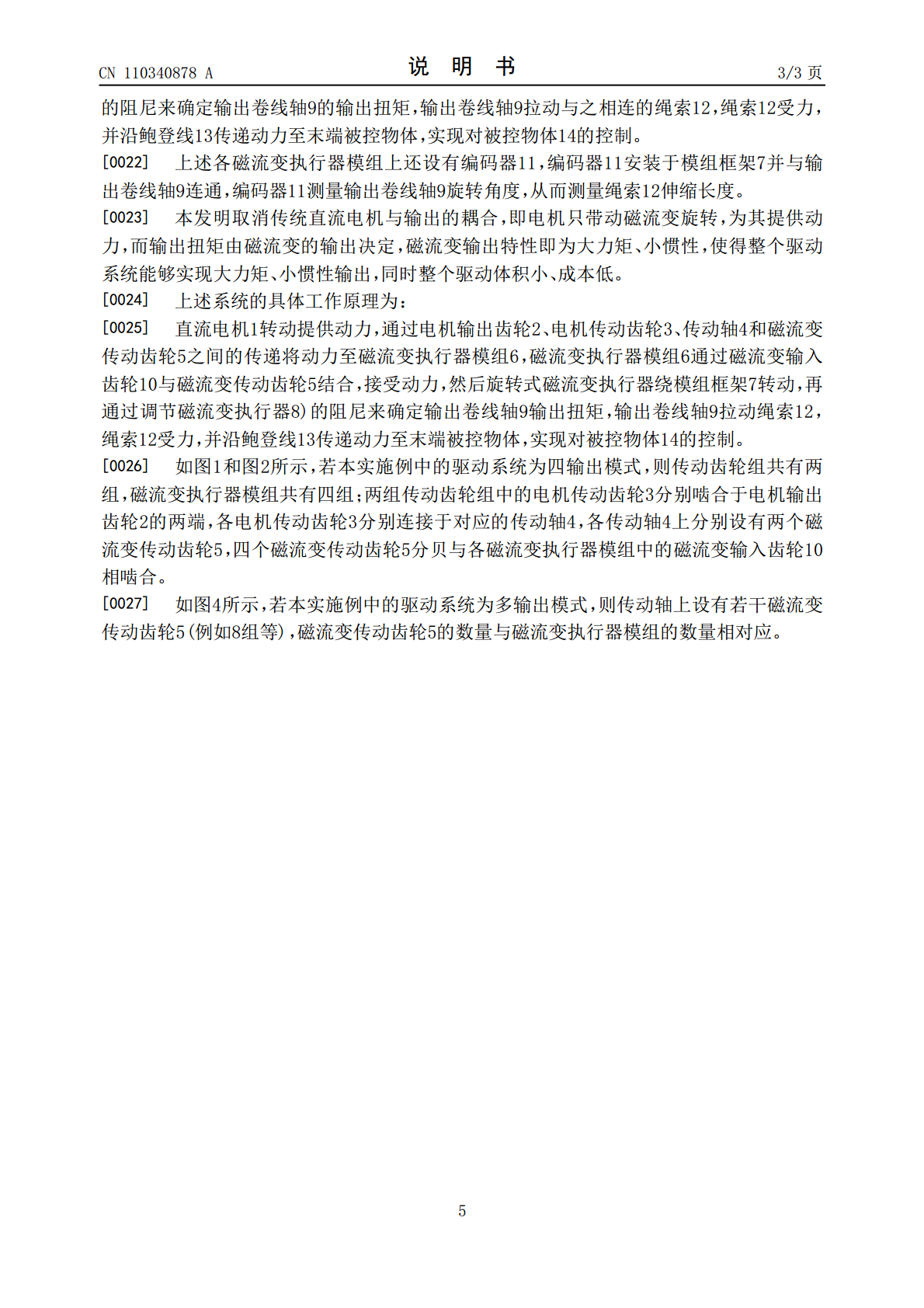
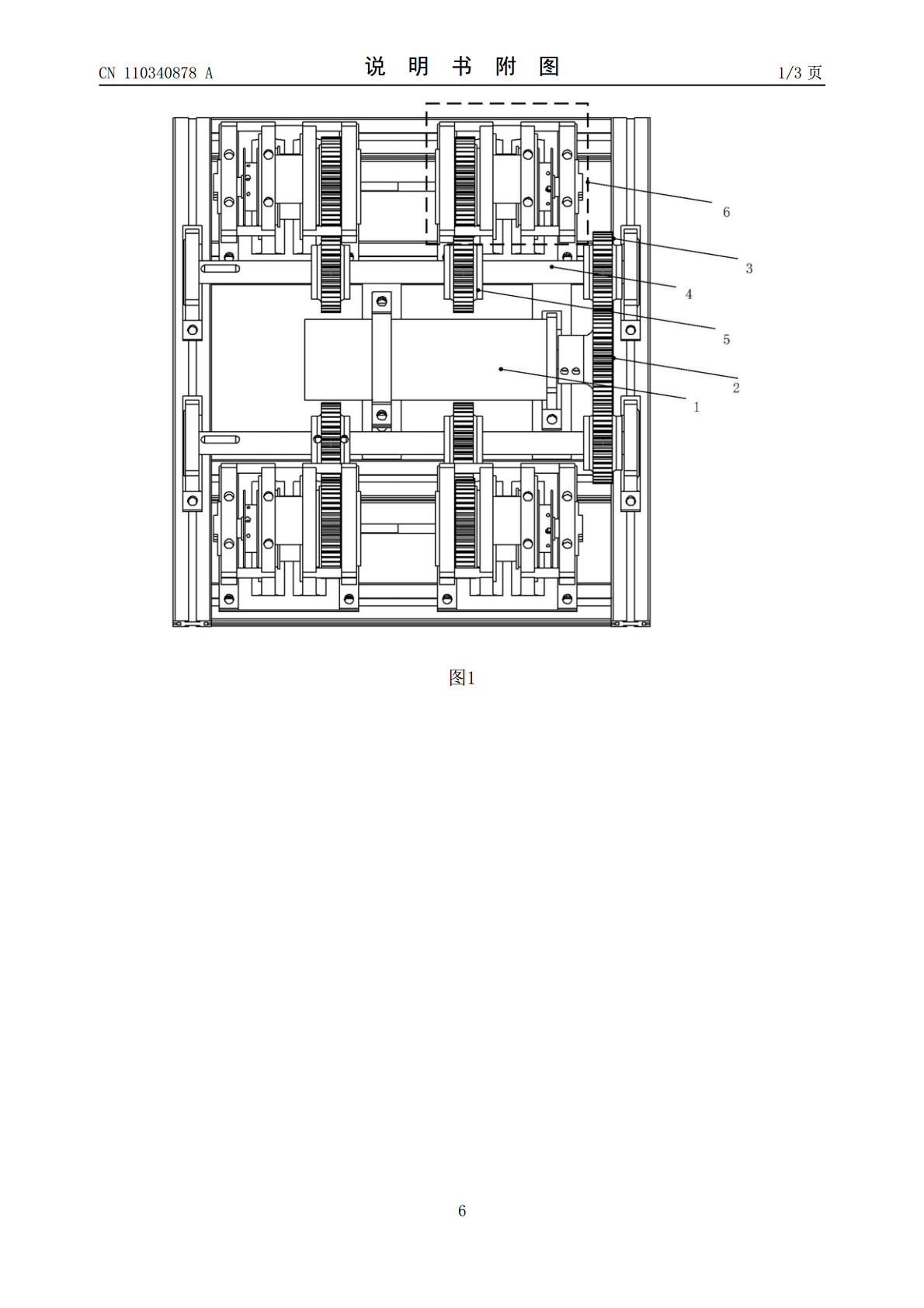
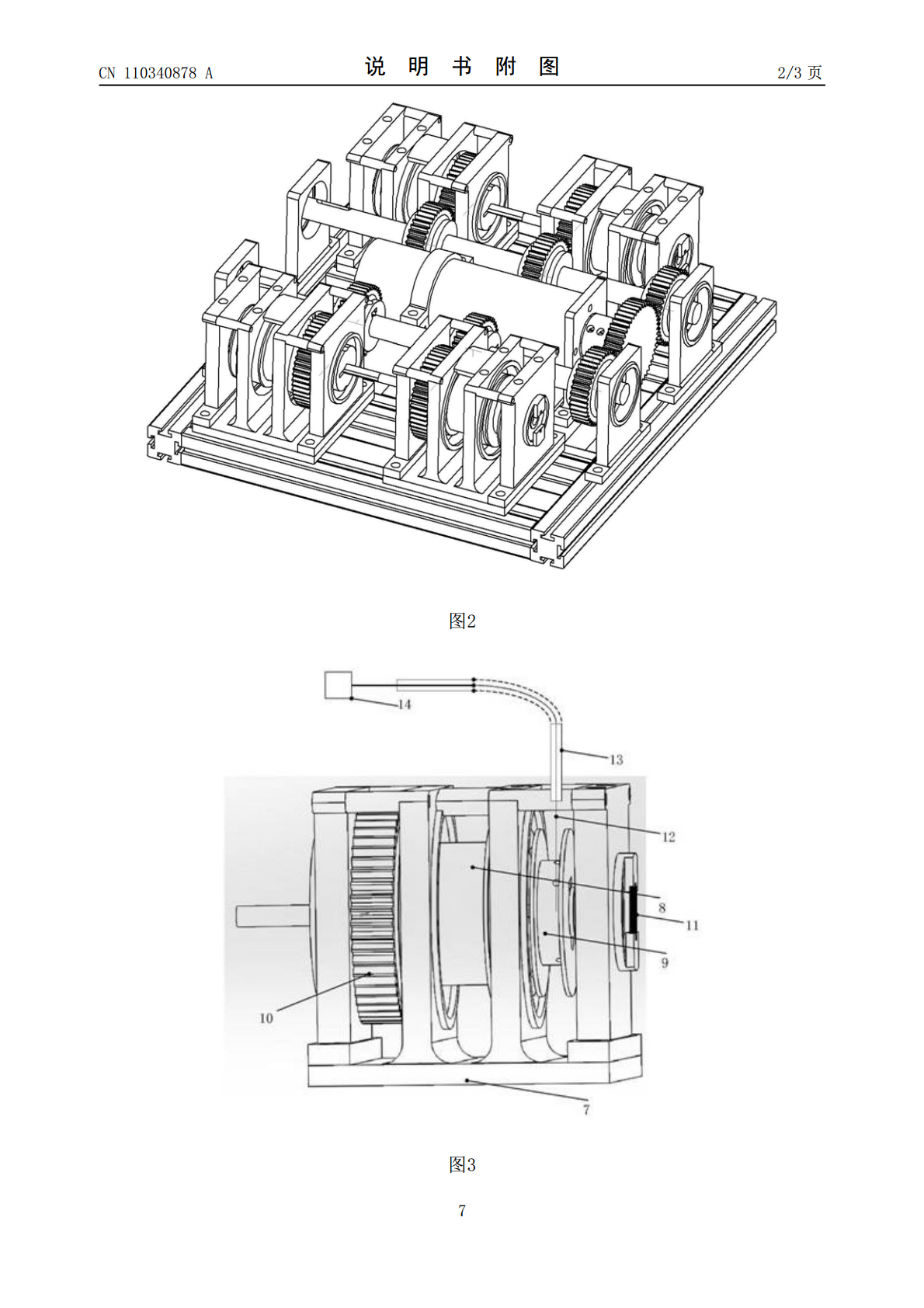
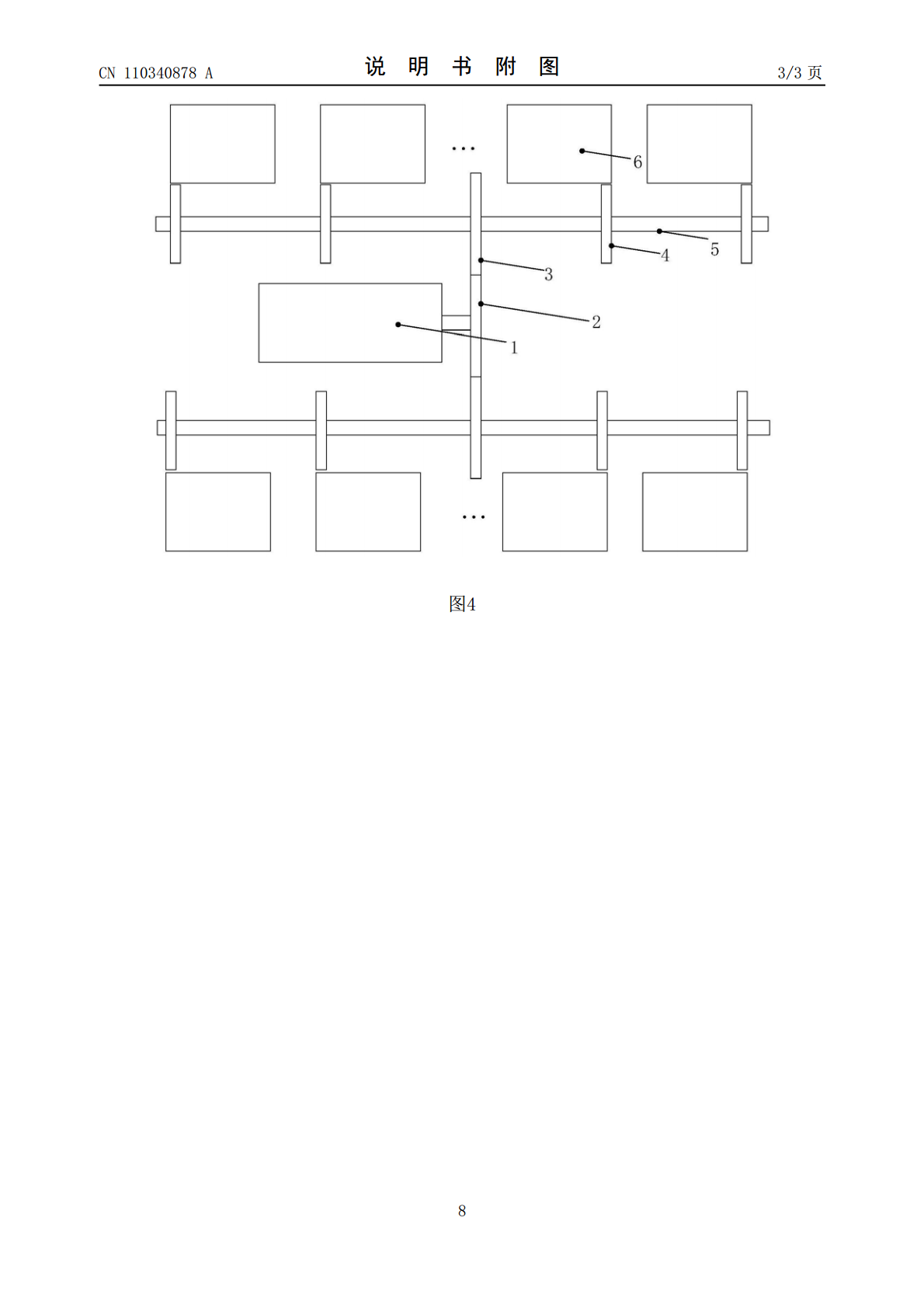
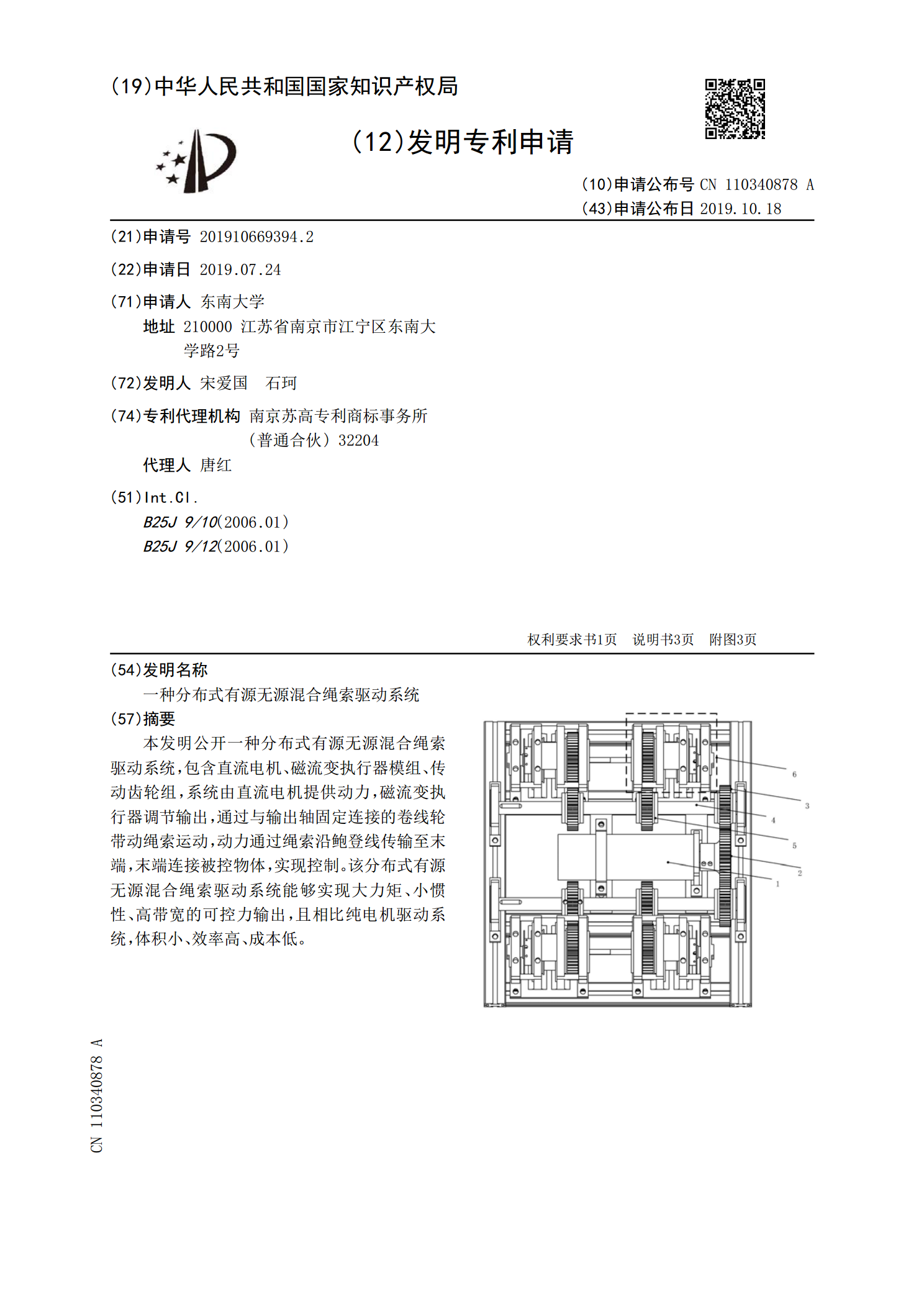
本发明公开一种分布式有源无源混合绳索驱动系统,包含直流电机、磁流变执行器模组、传动齿轮组,系统由直流电机提供动力,磁流变执行器调节输出,通过与输出轴固定连接的卷线轮带动绳索运动,动力通过绳索沿鲍登线传输至末端,末端连接被控物体,实现控制。该分布式有源无源混合绳索驱动系统能够实现大力矩、小惯性、高带宽的可控力输出,且相比纯电机驱动系统,体积小、效率高、成本低。
一种有源无源混合集成天线.pdf
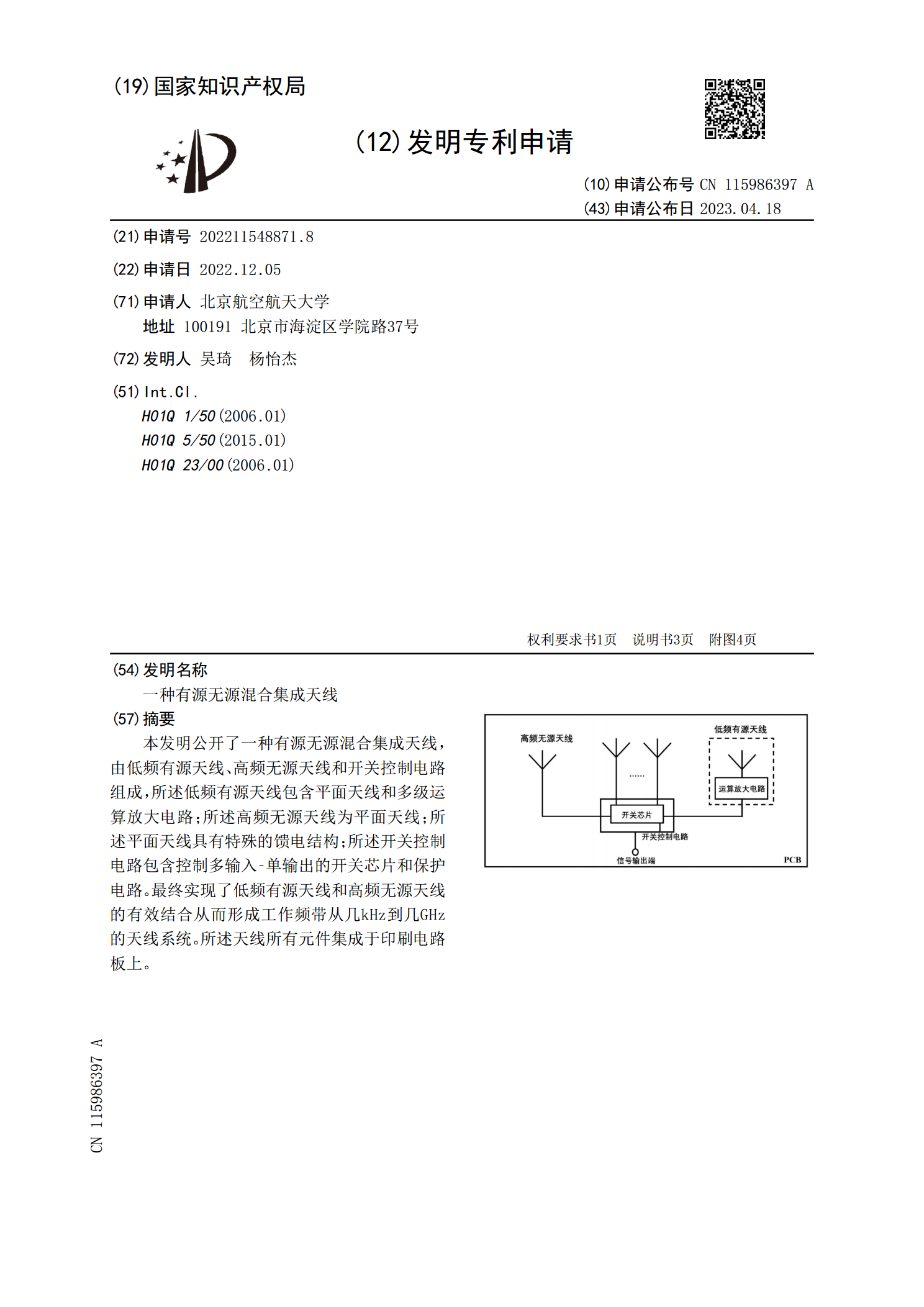
本发明公开了一种有源无源混合集成天线,由低频有源天线、高频无源天线和开关控制电路组成,所述低频有源天线包含平面天线和多级运算放大电路;所述高频无源天线为平面天线;所述平面天线具有特殊的馈电结构;所述开关控制电路包含控制多输入‑单输出的开关芯片和保护电路。最终实现了低频有源天线和高频无源天线的有效结合从而形成工作频带从几kHz到几GHz的天线系统。所述天线所有元件集成于印刷电路板上。
一种混合动力框架车分布式驱动系统.pdf
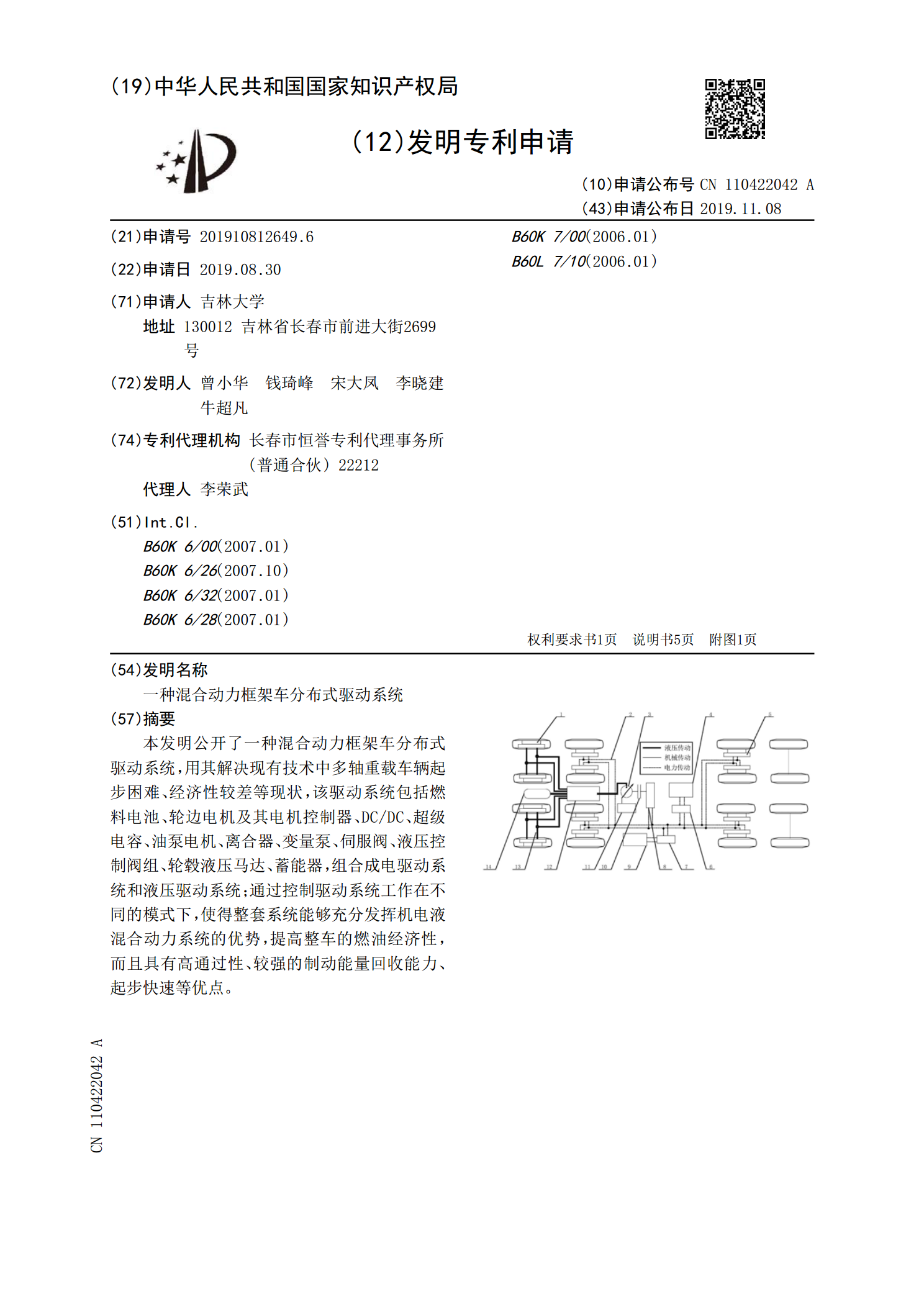
本发明公开了一种混合动力框架车分布式驱动系统,用其解决现有技术中多轴重载车辆起步困难、经济性较差等现状,该驱动系统包括燃料电池、轮边电机及其电机控制器、DC/DC、超级电容、油泵电机、离合器、变量泵、伺服阀、液压控制阀组、轮毂液压马达、蓄能器,组合成电驱动系统和液压驱动系统;通过控制驱动系统工作在不同的模式下,使得整套系统能够充分发挥机电液混合动力系统的优势,提高整车的燃油经济性,而且具有高通过性、较强的制动能量回收能力、起步快速等优点。
一种分布式三轴驱动混合动力系统.pdf
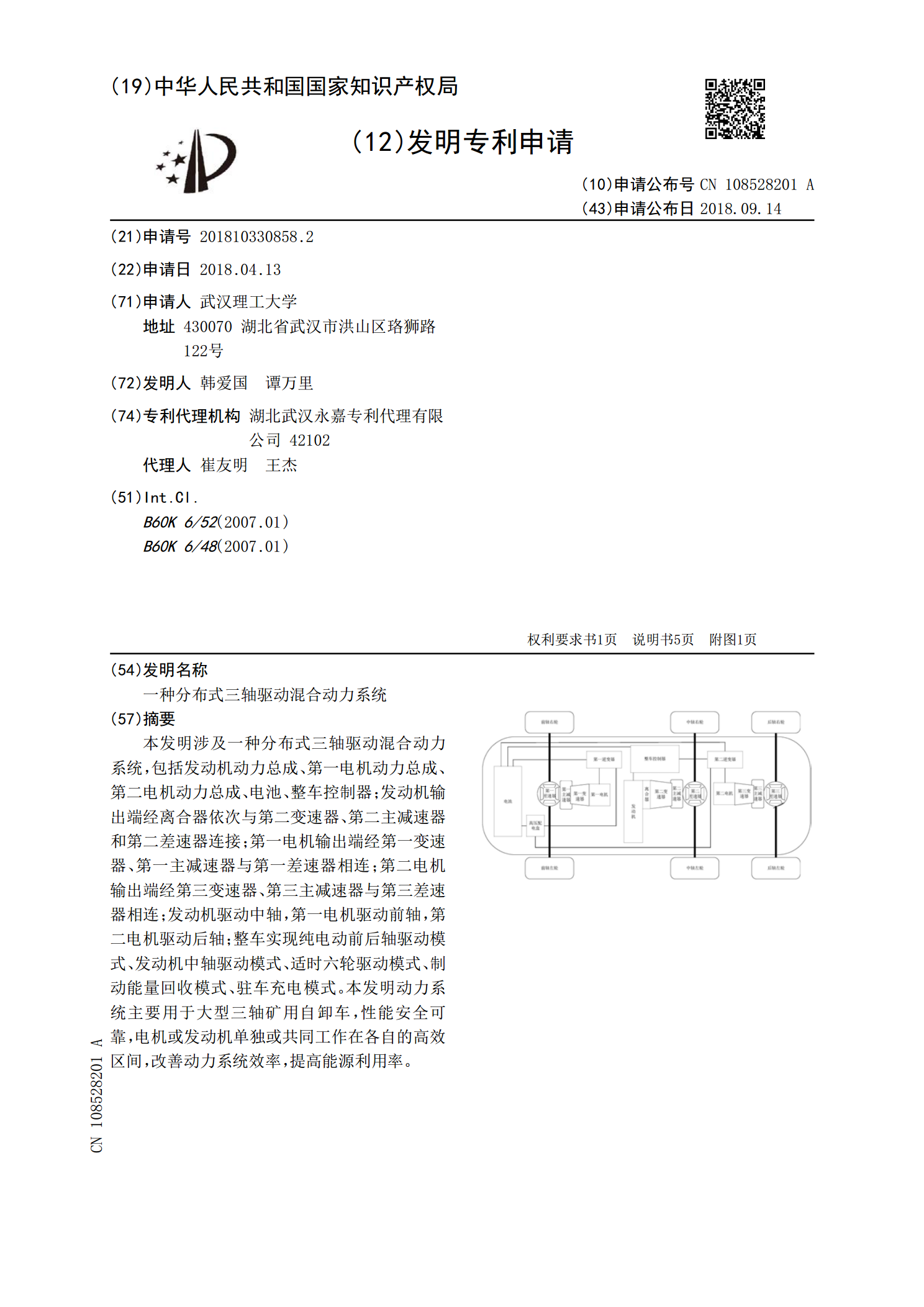
本发明涉及一种分布式三轴驱动混合动力系统,包括发动机动力总成、第一电机动力总成、第二电机动力总成、电池、整车控制器;发动机输出端经离合器依次与第二变速器、第二主减速器和第二差速器连接;第一电机输出端经第一变速器、第一主减速器与第一差速器相连;第二电机输出端经第三变速器、第三主减速器与第三差速器相连;发动机驱动中轴,第一电机驱动前轴,第二电机驱动后轴;整车实现纯电动前后轴驱动模式、发动机中轴驱动模式、适时六轮驱动模式、制动能量回收模式、驻车充电模式。本发明动力系统主要用于大型三轴矿用自卸车,性能安全可靠,电
一种用于传动装置系统的驱动绳索.pdf
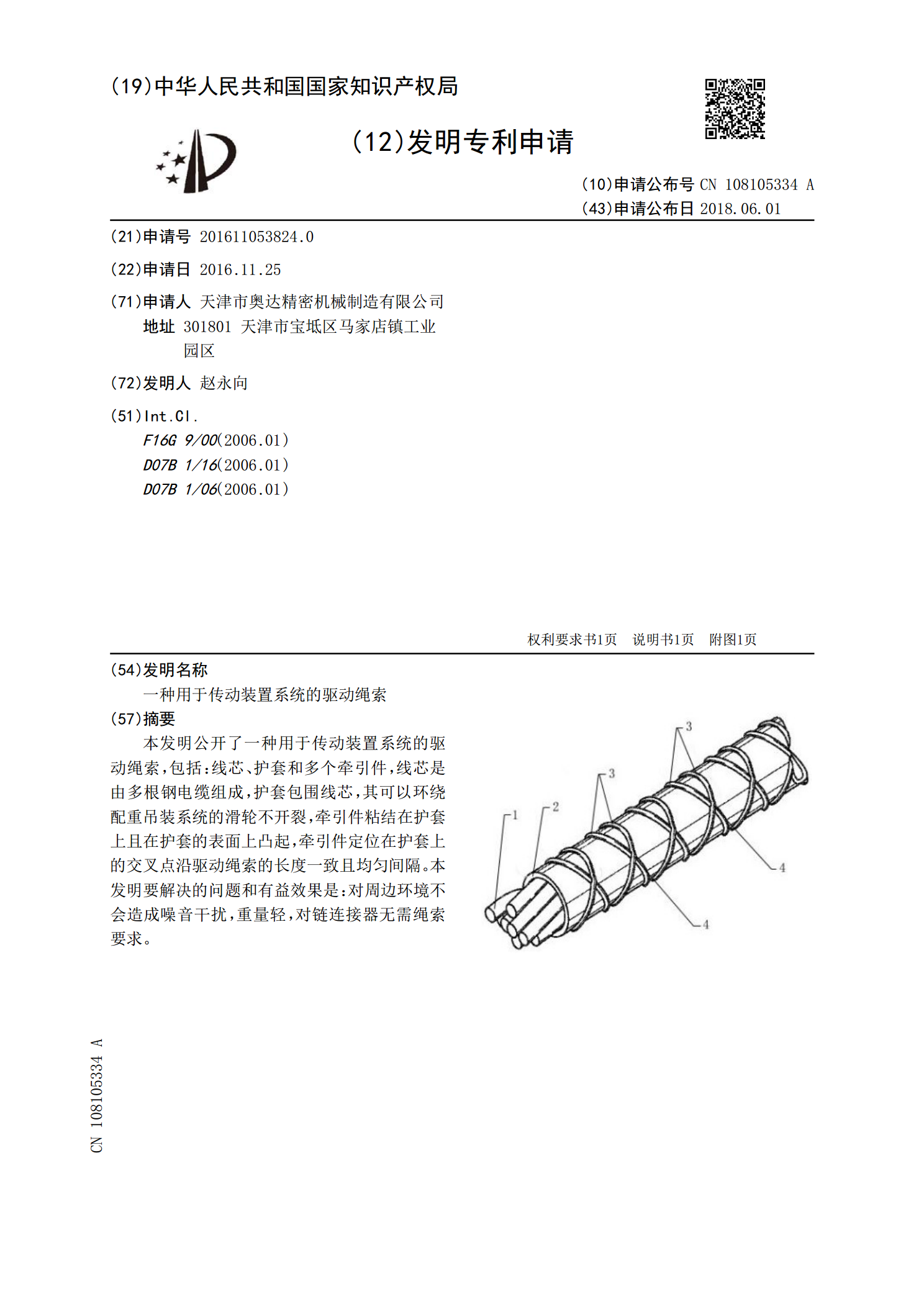
本发明公开了一种用于传动装置系统的驱动绳索,包括:线芯、护套和多个牵引件,线芯是由多根钢电缆组成,护套包围线芯,其可以环绕配重吊装系统的滑轮不开裂,牵引件粘结在护套上且在护套的表面上凸起,牵引件定位在护套上的交叉点沿驱动绳索的长度一致且均匀间隔。本发明要解决的问题和有益效果是:对周边环境不会造成噪音干扰,重量轻,对链连接器无需绳索要求。