
一种机器视觉跟踪转动装置和控制方法.pdf

桂香****盟主

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种机器视觉跟踪转动装置和控制方法.pdf
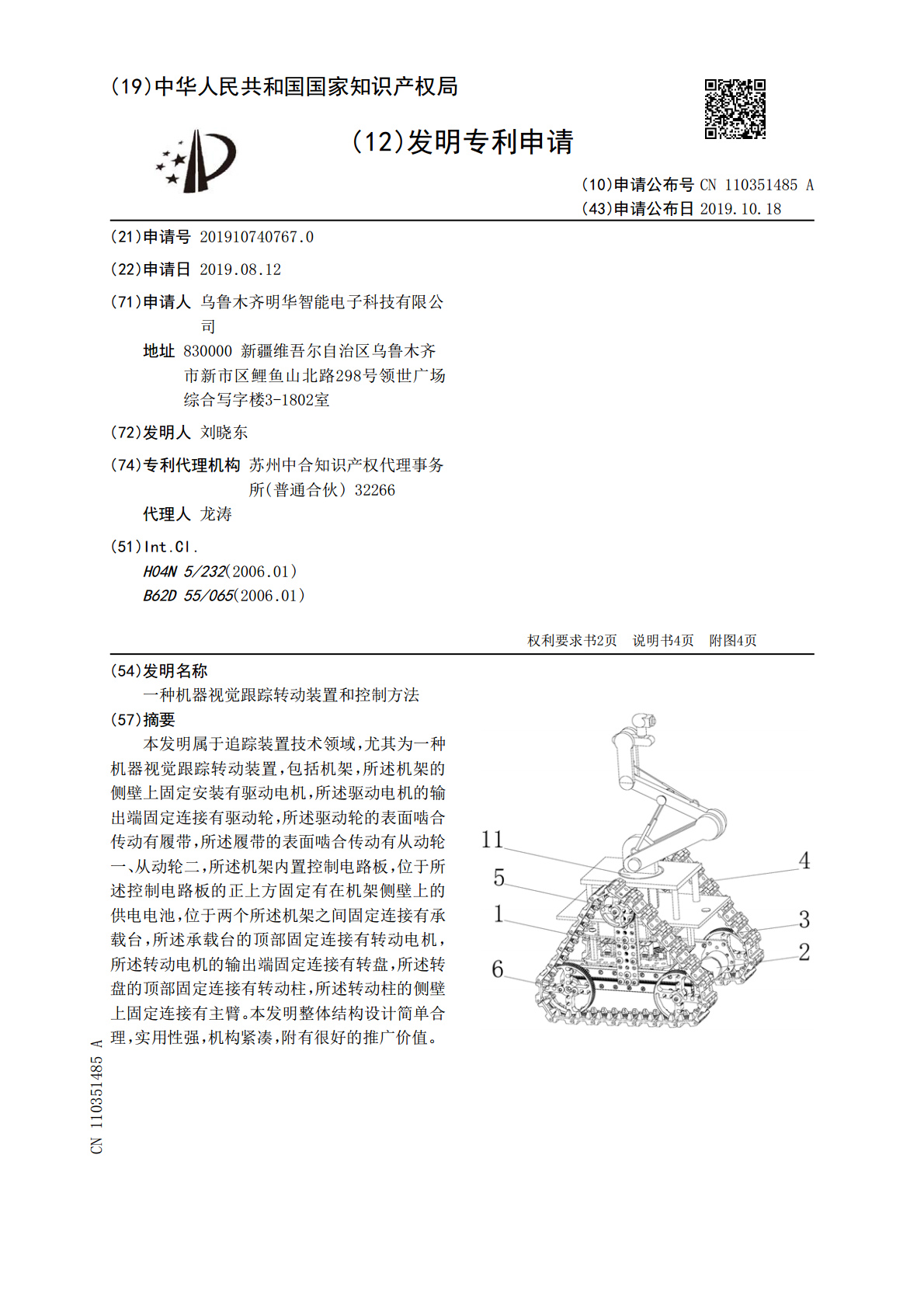
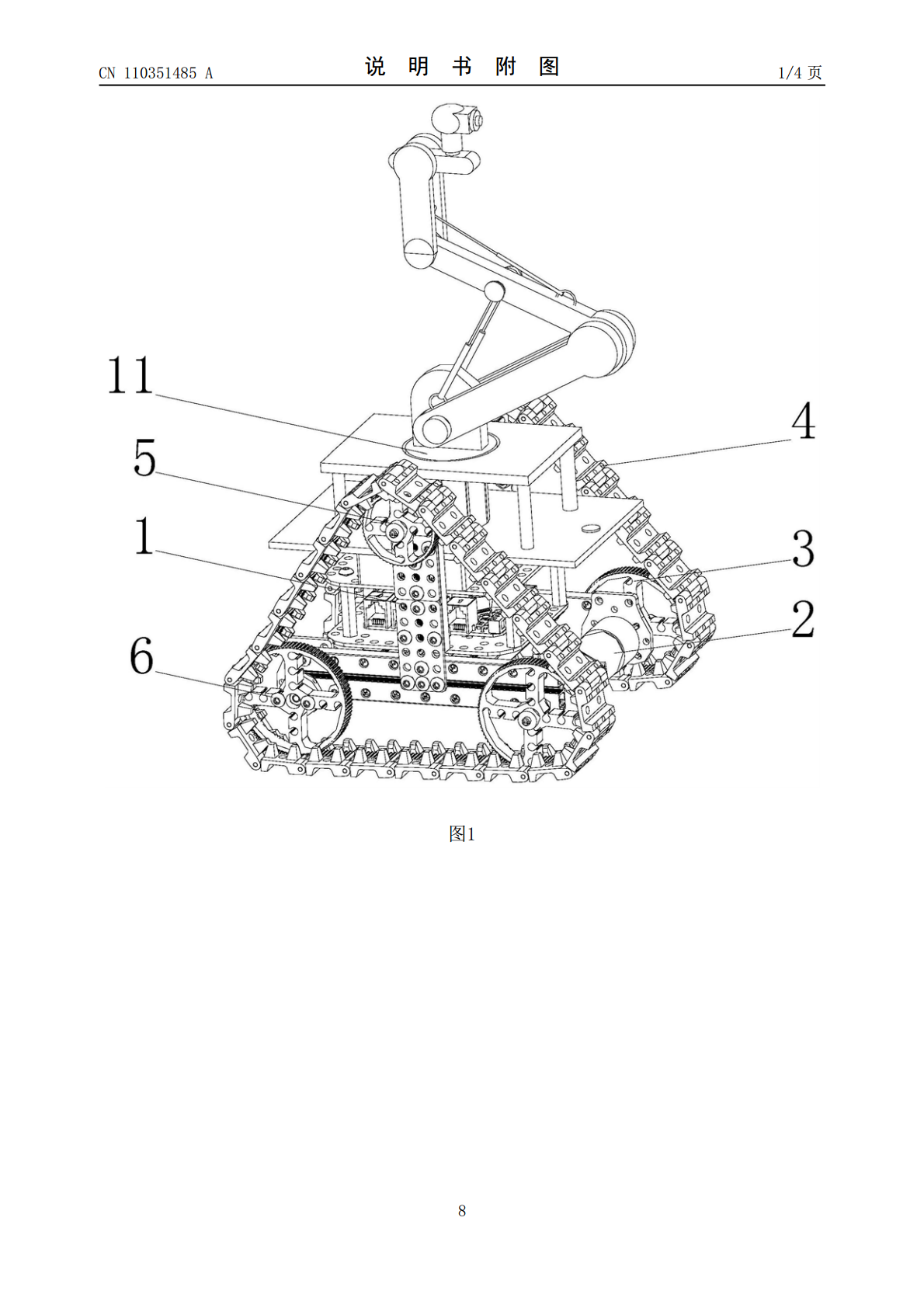
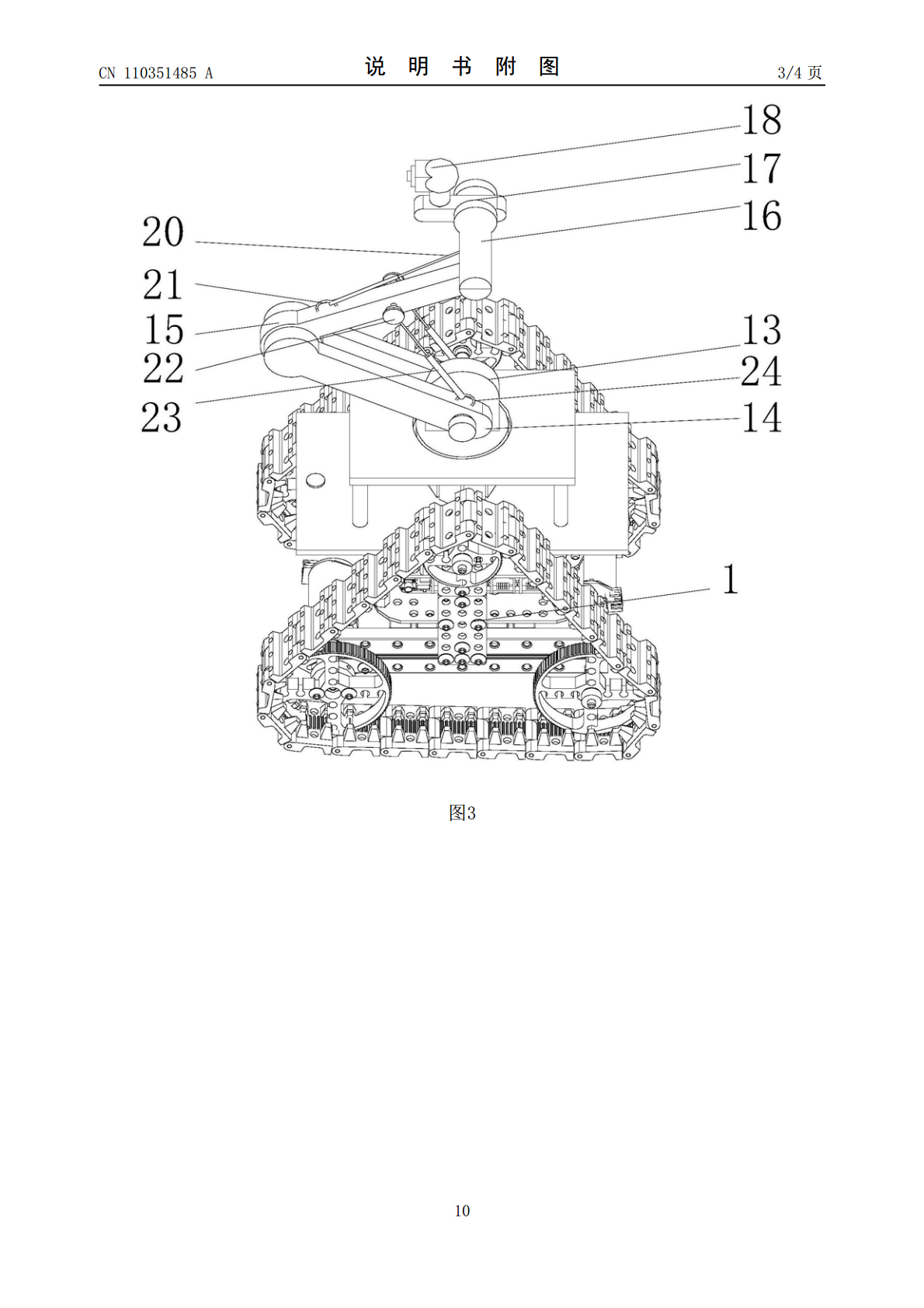
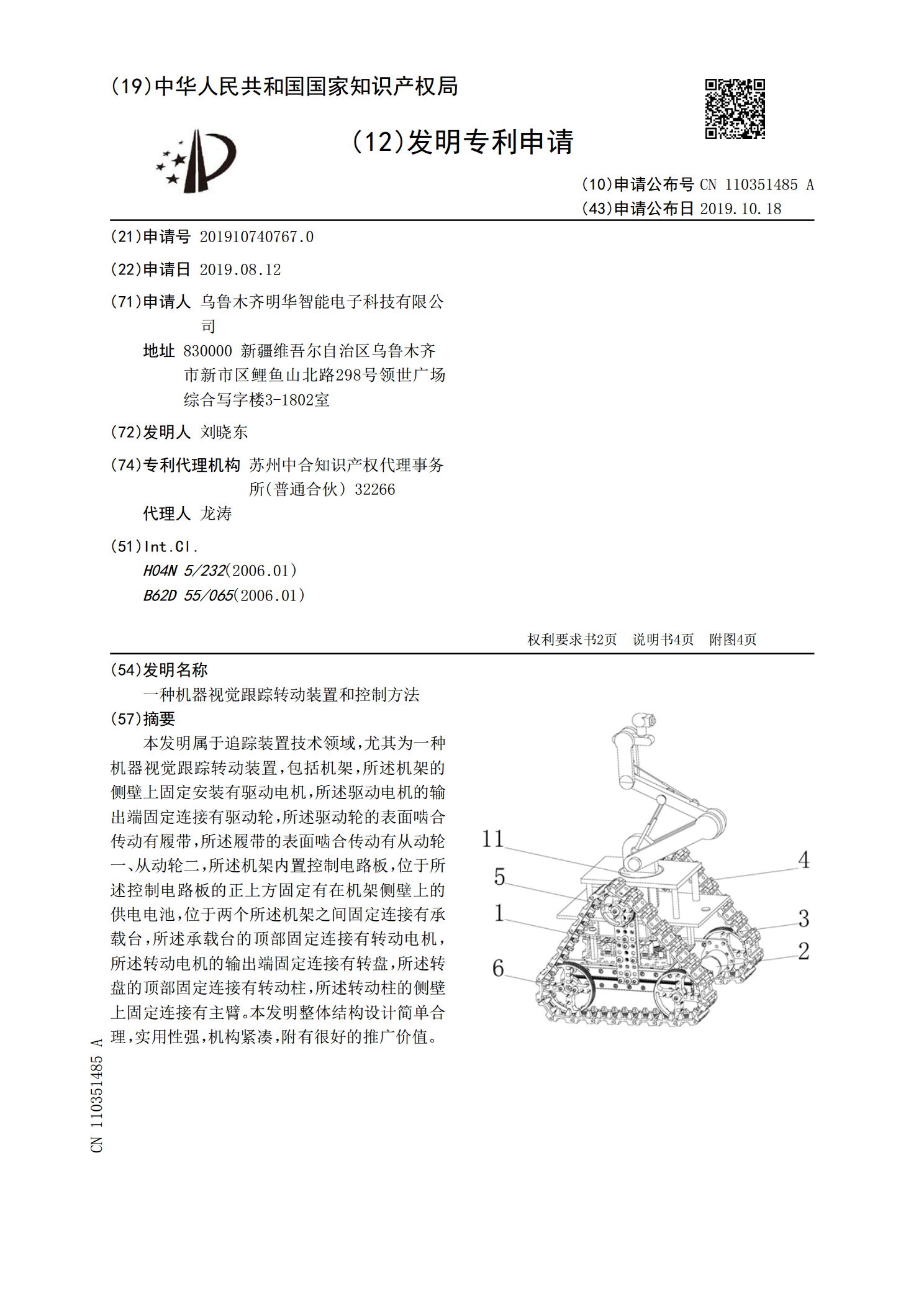
本发明属于追踪装置技术领域,尤其为一种机器视觉跟踪转动装置,包括机架,所述机架的侧壁上固定安装有驱动电机,所述驱动电机的输出端固定连接有驱动轮,所述驱动轮的表面啮合传动有履带,所述履带的表面啮合传动有从动轮一、从动轮二,所述机架内置控制电路板,位于所述控制电路板的正上方固定有在机架侧壁上的供电电池,位于两个所述机架之间固定连接有承载台,所述承载台的顶部固定连接有转动电机,所述转动电机的输出端固定连接有转盘,所述转盘的顶部固定连接有转动柱,所述转动柱的侧壁上固定连接有主臂。本发明整体结构设计简单合理,实用性
一种视觉跟踪方法和跟踪装置.pdf
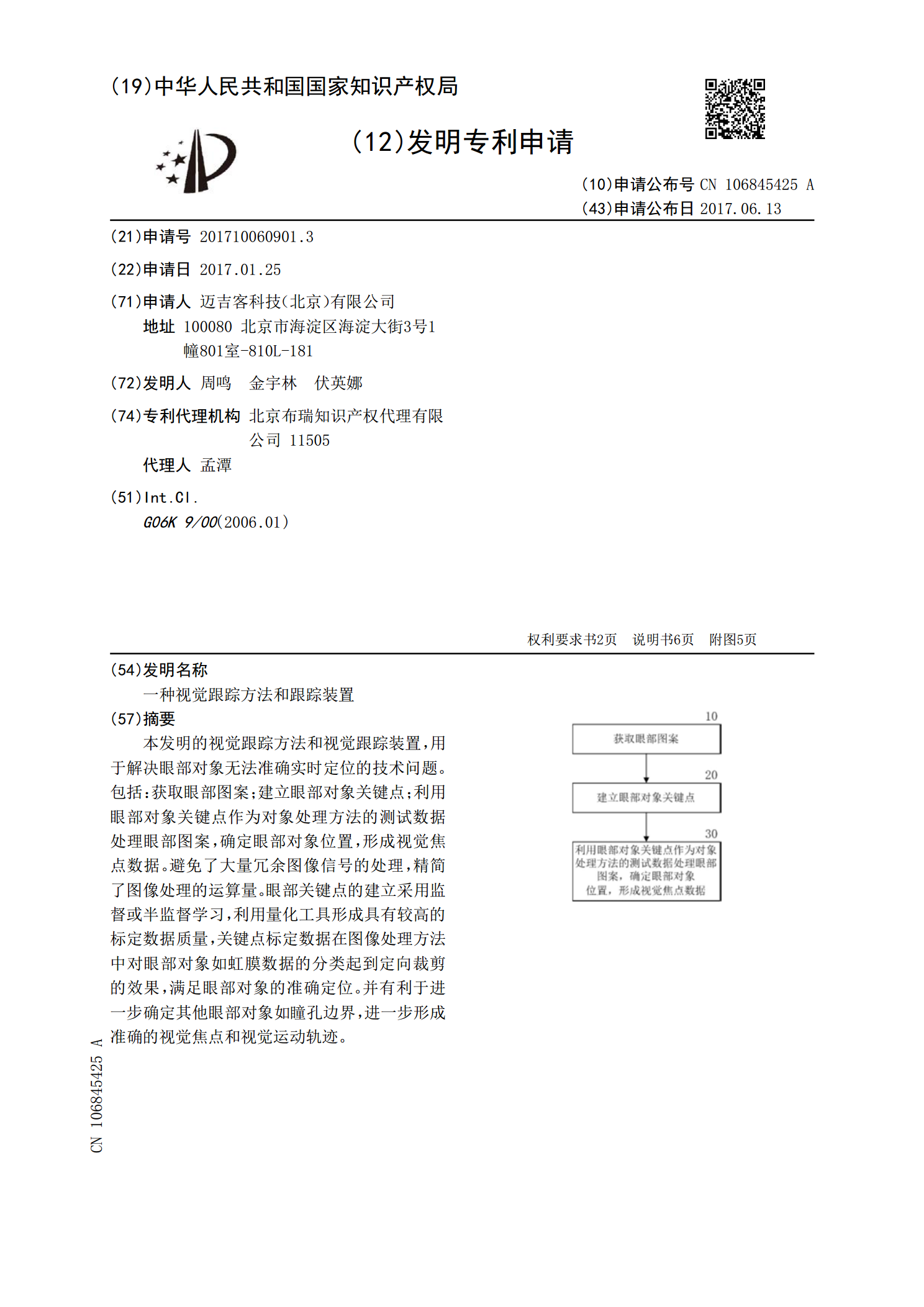
本发明的视觉跟踪方法和视觉跟踪装置,用于解决眼部对象无法准确实时定位的技术问题。包括:获取眼部图案;建立眼部对象关键点;利用眼部对象关键点作为对象处理方法的测试数据处理眼部图案,确定眼部对象位置,形成视觉焦点数据。避免了大量冗余图像信号的处理,精简了图像处理的运算量。眼部关键点的建立采用监督或半监督学习,利用量化工具形成具有较高的标定数据质量,关键点标定数据在图像处理方法中对眼部对象如虹膜数据的分类起到定向裁剪的效果,满足眼部对象的准确定位。并有利于进一步确定其他眼部对象如瞳孔边界,进一步形成准确的视觉焦

一种基于机器视觉的岸桥控制方法和装置.pdf
本申请涉及一种基于机器视觉的岸桥控制方法和装置,属于港口岸桥作业辅助技术领域,解决现有方法的集卡定位精度低和单双箱判断准确性率不足而导致岸桥抓放箱作业效率低的问题。方法包括:对集卡的目标停车位置以及装载集装箱的集卡高度估计进行标定;基于目标矩形区域和目标停车位置计算初定位偏差距离;对车身图像进行图像裁剪以生成车身子图像;利用第二目标检测模型识别出箱孔坐标和文字或车架导板坐标;基于是否是融合区域、箱孔坐标和文字进行单双箱判断;估计集装箱的高度;计算移动偏差距离以将集卡引导至目标停车位置;根据判断的单双箱调整

机器人视觉定位方法和装置、视觉标定方法和装置.pdf
本发明提出了一种机器人视觉定位方法和装置,该方法包括:获取目标图像,对所述目标图像进行预处理;根据预设的分割参数对图像进行特征分割,对分割后的图像进行滤波处理,对滤波后的图像进行连通域检测提取组成特征标志的亮斑,对提取的亮斑进行过滤处理,判断过滤后的亮斑数目是否符合预设的数目,若否,则重新调整分割参数,进行重新检测,若是,则识别亮斑轮廓线,判断识别出的亮斑轮廓线与预设的模板轮廓线是否匹配,若是,则输出识别出的特征标志。该方法通过自动调整分割参数,使得分割后的轮廓符合初始设置条件,适应光照条件不同的图像检测
一种基于视觉跟踪的AGV运动控制方法、装置及介质.pdf
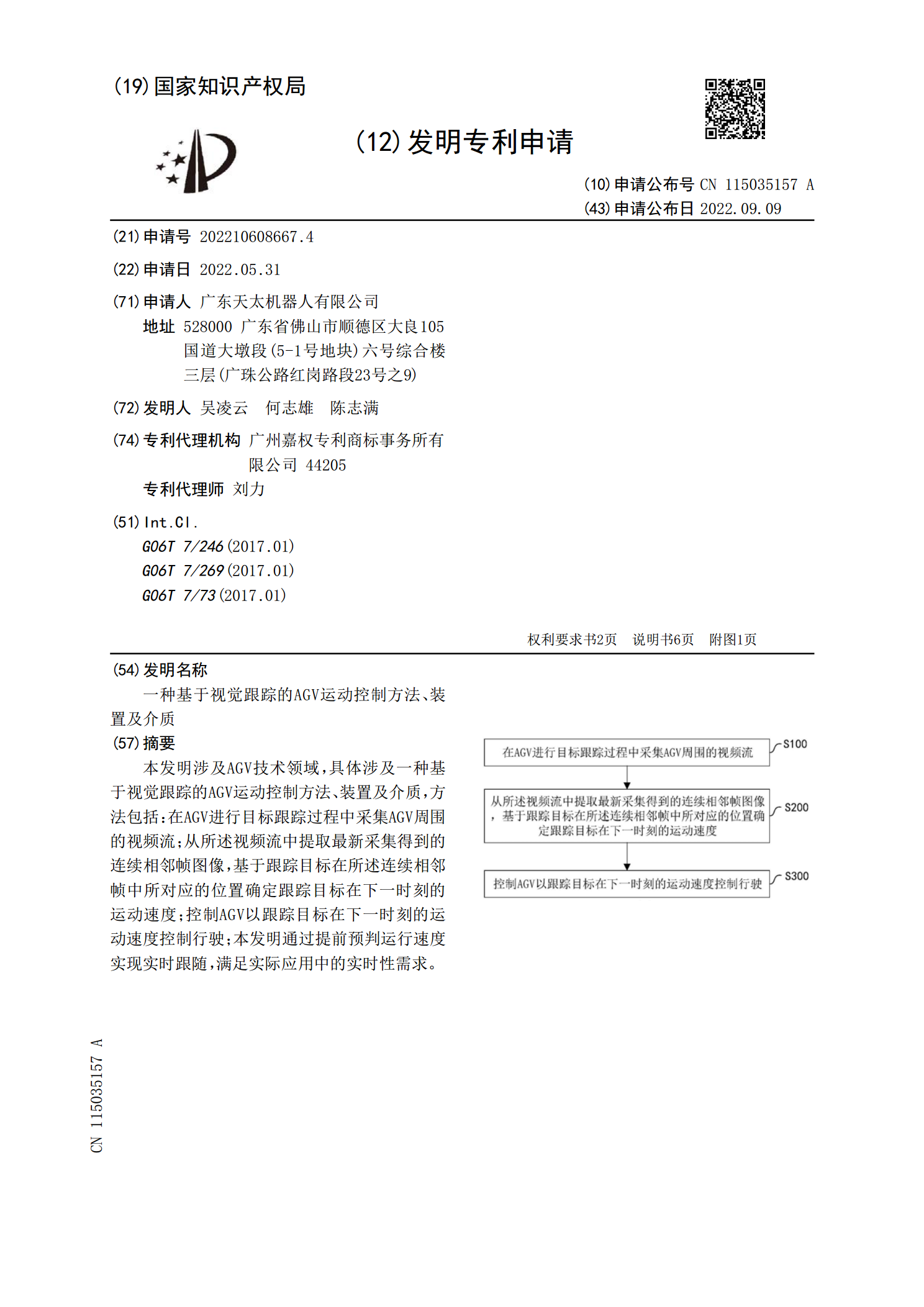
本发明涉及AGV技术领域,具体涉及一种基于视觉跟踪的AGV运动控制方法、装置及介质,方法包括:在AGV进行目标跟踪过程中采集AGV周围的视频流;从所述视频流中提取最新采集得到的连续相邻帧图像,基于跟踪目标在所述连续相邻帧中所对应的位置确定跟踪目标在下一时刻的运动速度;控制AGV以跟踪目标在下一时刻的运动速度控制行驶;本发明通过提前预判运行速度实现实时跟随,满足实际应用中的实时性需求。