
一种基于机器视觉的岸桥控制方法和装置.pdf

猫巷****正德

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于机器视觉的岸桥控制方法和装置.pdf
本申请涉及一种基于机器视觉的岸桥控制方法和装置,属于港口岸桥作业辅助技术领域,解决现有方法的集卡定位精度低和单双箱判断准确性率不足而导致岸桥抓放箱作业效率低的问题。方法包括:对集卡的目标停车位置以及装载集装箱的集卡高度估计进行标定;基于目标矩形区域和目标停车位置计算初定位偏差距离;对车身图像进行图像裁剪以生成车身子图像;利用第二目标检测模型识别出箱孔坐标和文字或车架导板坐标;基于是否是融合区域、箱孔坐标和文字进行单双箱判断;估计集装箱的高度;计算移动偏差距离以将集卡引导至目标停车位置;根据判断的单双箱调整
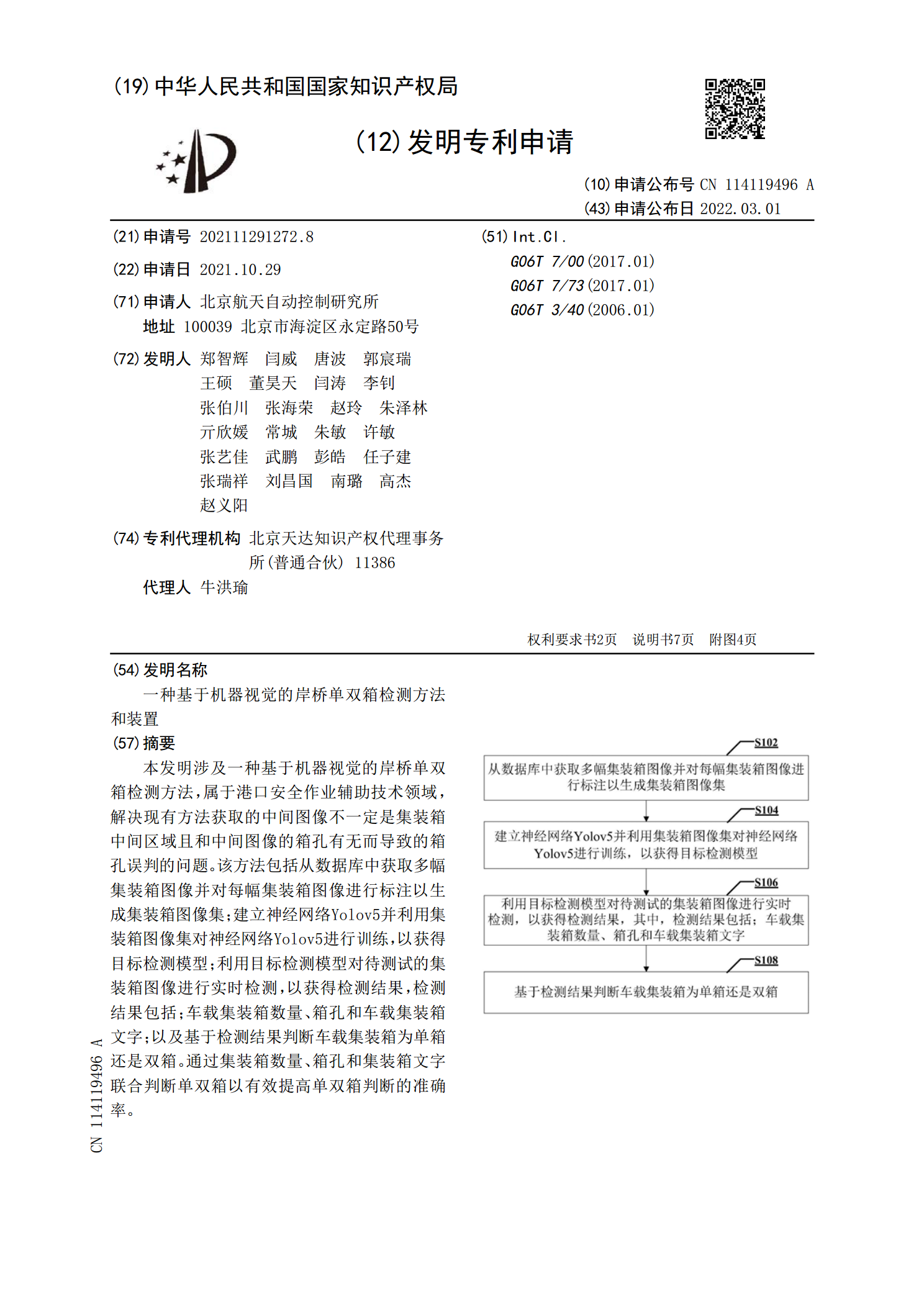
一种基于机器视觉的岸桥单双箱检测方法和装置.pdf
本发明涉及一种基于机器视觉的岸桥单双箱检测方法,属于港口安全作业辅助技术领域,解决现有方法获取的中间图像不一定是集装箱中间区域且和中间图像的箱孔有无而导致的箱孔误判的问题。该方法包括从数据库中获取多幅集装箱图像并对每幅集装箱图像进行标注以生成集装箱图像集;建立神经网络Yolov5并利用集装箱图像集对神经网络Yolov5进行训练,以获得目标检测模型;利用目标检测模型对待测试的集装箱图像进行实时检测,以获得检测结果,检测结果包括;车载集装箱数量、箱孔和车载集装箱文字;以及基于检测结果判断车载集装箱为单箱还是双
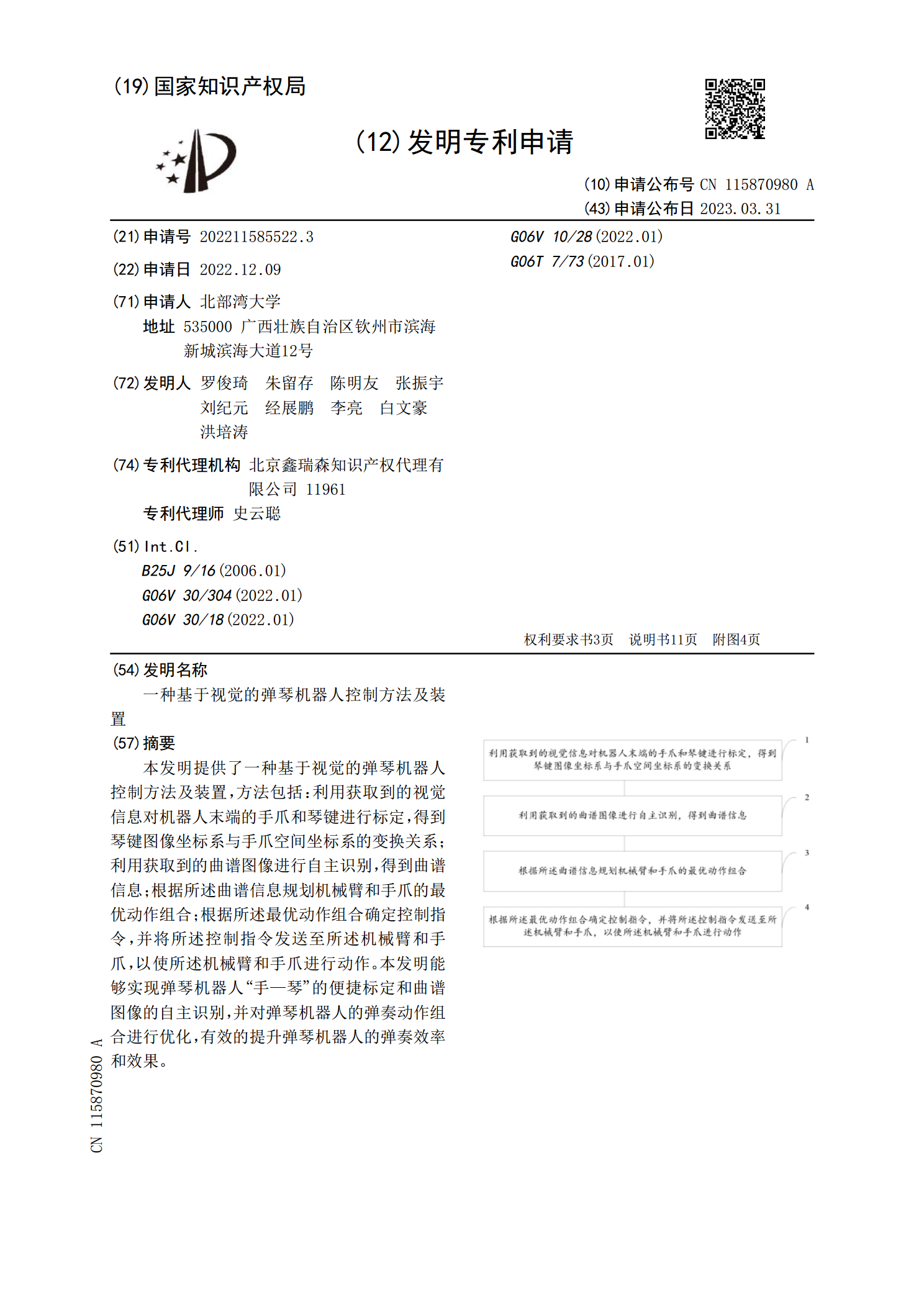
一种基于视觉的弹琴机器人控制方法及装置.pdf
本发明提供了一种基于视觉的弹琴机器人控制方法及装置,方法包括:利用获取到的视觉信息对机器人末端的手爪和琴键进行标定,得到琴键图像坐标系与手爪空间坐标系的变换关系;利用获取到的曲谱图像进行自主识别,得到曲谱信息;根据所述曲谱信息规划机械臂和手爪的最优动作组合;根据所述最优动作组合确定控制指令,并将所述控制指令发送至所述机械臂和手爪,以使所述机械臂和手爪进行动作。本发明能够实现弹琴机器人“手—琴”的便捷标定和曲谱图像的自主识别,并对弹琴机器人的弹奏动作组合进行优化,有效的提升弹琴机器人的弹奏效率和效果。

一种基于机器视觉的自动陶瓷涂胶装置和方法.pdf
本发明公开了一种基于机器视觉的自动陶瓷涂胶装置和方法,装置包括有主控制系统、光源系统、图像采集系统、光幕检测系统、测距系统、运动系统、电气控制系统和涂胶系统,方法包括以下步骤:光幕检测系统检测光幕到位后,测距系统测量陶瓷器件的高度,由图像采集系统采集陶瓷器件图像数据,并由主控制系统得到涂胶轨迹;主控制系统驱动运动系统,控制涂胶系统按照涂胶轨迹对陶瓷器件进行涂胶。本发明通过主控制系统、运动系统、涂胶系统结合图像采集系统等,实现对陶瓷器件涂胶轨迹的计算以及自动涂胶,尤其是涂胶形状复杂时,自动涂胶的效率高、涂胶
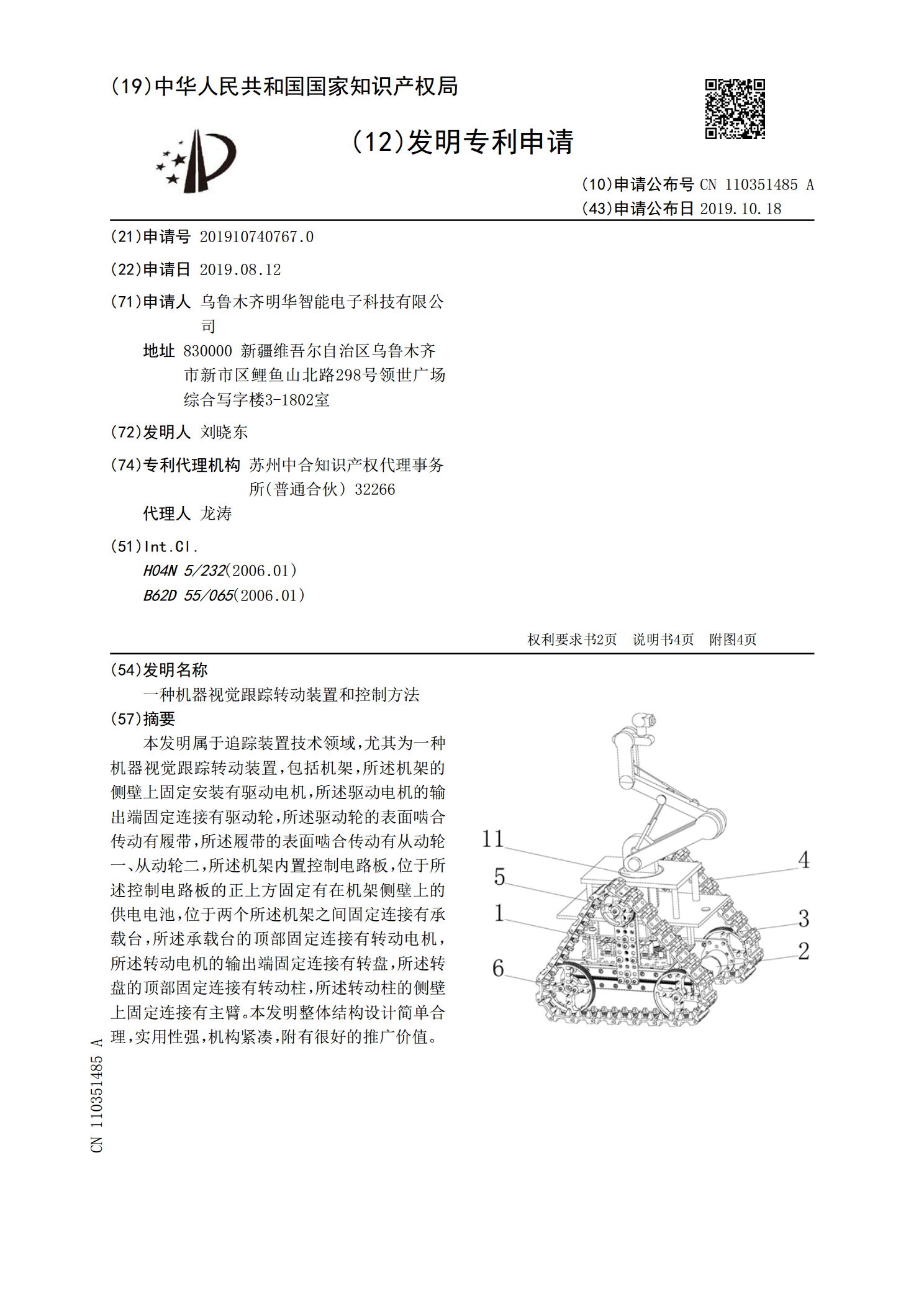
一种机器视觉跟踪转动装置和控制方法.pdf
本发明属于追踪装置技术领域,尤其为一种机器视觉跟踪转动装置,包括机架,所述机架的侧壁上固定安装有驱动电机,所述驱动电机的输出端固定连接有驱动轮,所述驱动轮的表面啮合传动有履带,所述履带的表面啮合传动有从动轮一、从动轮二,所述机架内置控制电路板,位于所述控制电路板的正上方固定有在机架侧壁上的供电电池,位于两个所述机架之间固定连接有承载台,所述承载台的顶部固定连接有转动电机,所述转动电机的输出端固定连接有转盘,所述转盘的顶部固定连接有转动柱,所述转动柱的侧壁上固定连接有主臂。本发明整体结构设计简单合理,实用性