
一种基于视觉跟踪的AGV运动控制方法、装置及介质.pdf

靖烟****魔王

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于视觉跟踪的AGV运动控制方法、装置及介质.pdf
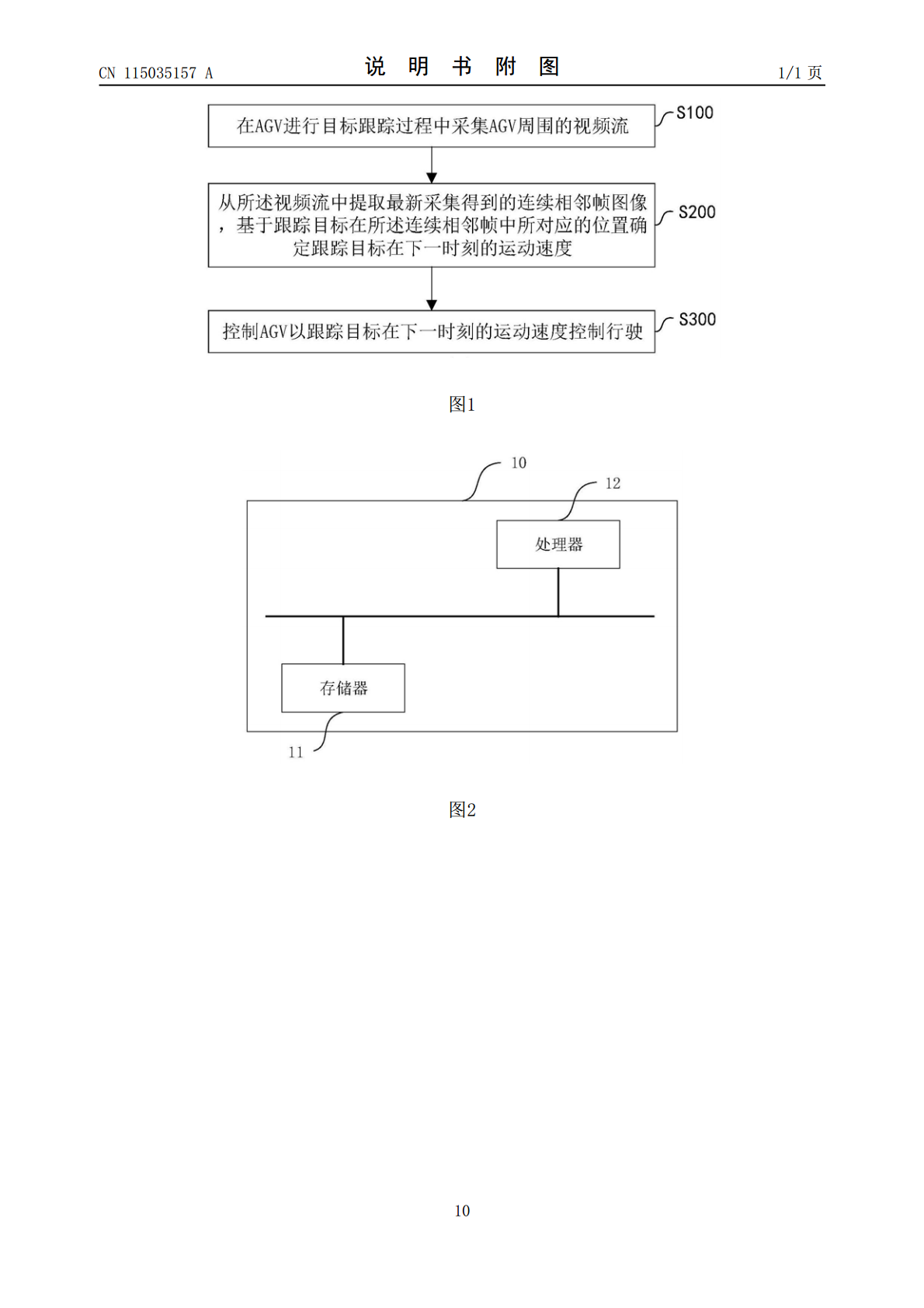
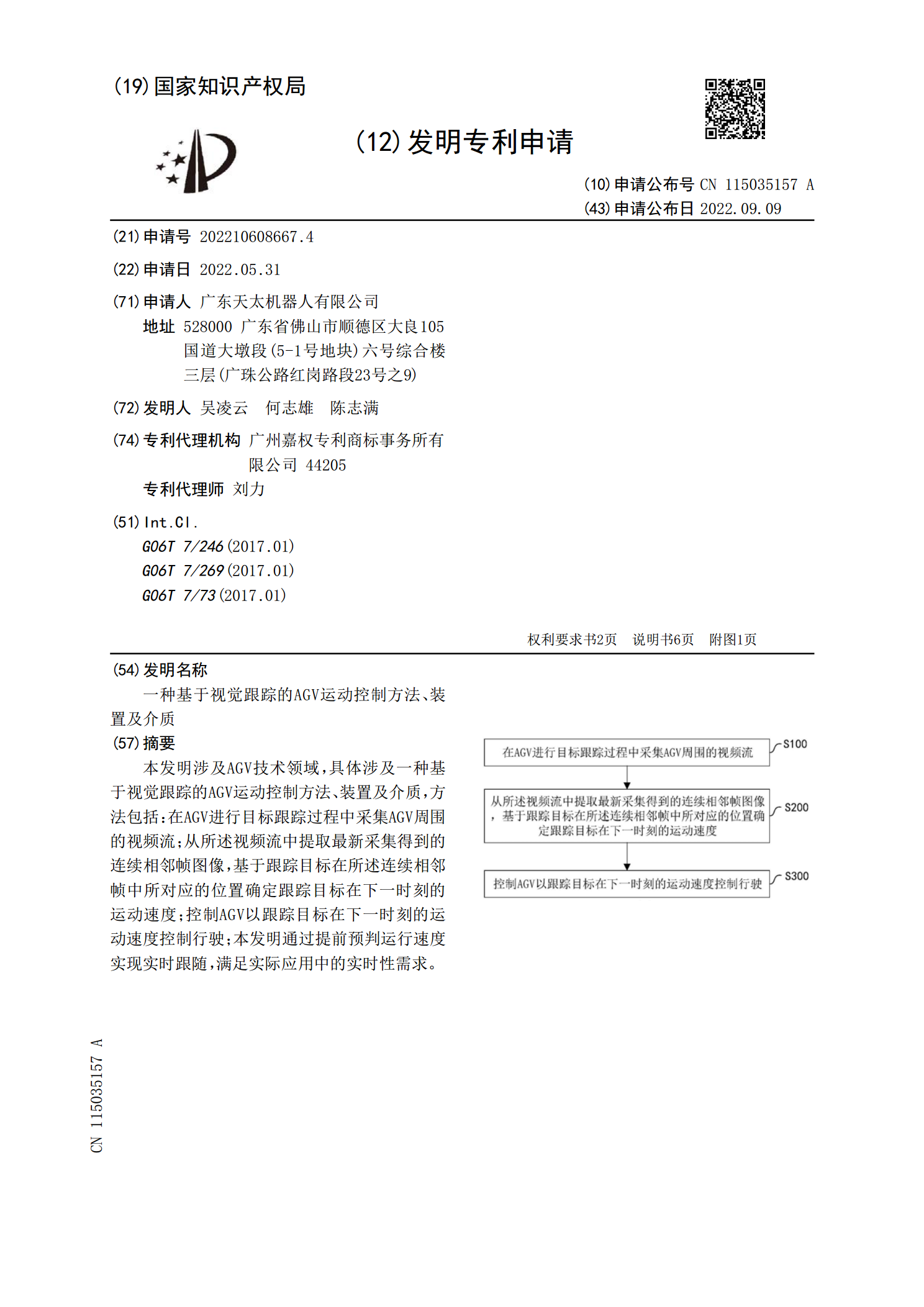
本发明涉及AGV技术领域,具体涉及一种基于视觉跟踪的AGV运动控制方法、装置及介质,方法包括:在AGV进行目标跟踪过程中采集AGV周围的视频流;从所述视频流中提取最新采集得到的连续相邻帧图像,基于跟踪目标在所述连续相邻帧中所对应的位置确定跟踪目标在下一时刻的运动速度;控制AGV以跟踪目标在下一时刻的运动速度控制行驶;本发明通过提前预判运行速度实现实时跟随,满足实际应用中的实时性需求。
基于视觉纠偏的AGV堆垛方法、装置、设备及介质.pdf
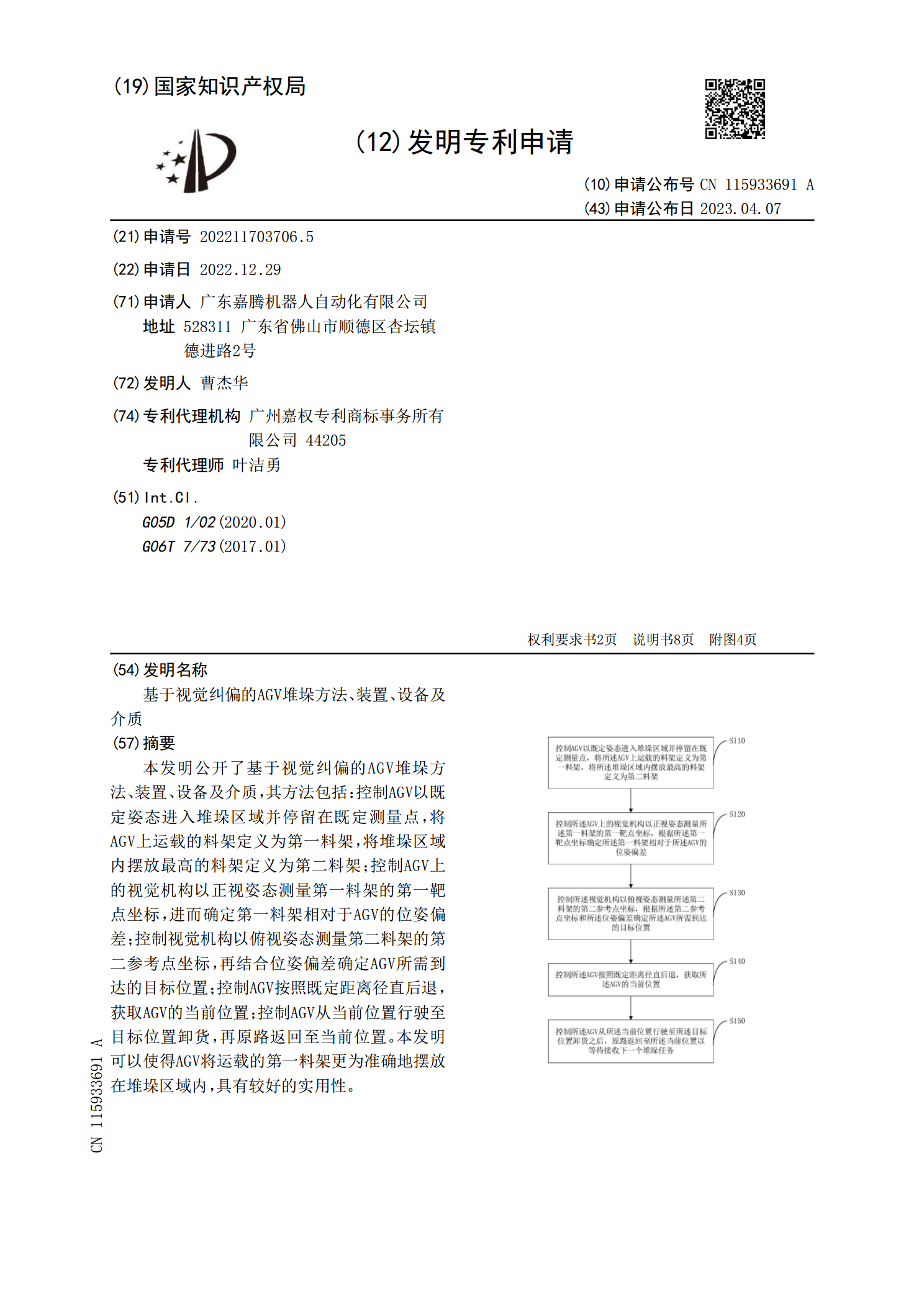
本发明公开了基于视觉纠偏的AGV堆垛方法、装置、设备及介质,其方法包括:控制AGV以既定姿态进入堆垛区域并停留在既定测量点,将AGV上运载的料架定义为第一料架,将堆垛区域内摆放最高的料架定义为第二料架;控制AGV上的视觉机构以正视姿态测量第一料架的第一靶点坐标,进而确定第一料架相对于AGV的位姿偏差;控制视觉机构以俯视姿态测量第二料架的第二参考点坐标,再结合位姿偏差确定AGV所需到达的目标位置;控制AGV按照既定距离径直后退,获取AGV的当前位置;控制AGV从当前位置行驶至目标位置卸货,再原路返回至当前位
一种基于MPC控制的AGV路径跟踪方法及系统.pdf
本发明公开了一种基于MPC控制的AGV路径跟踪方法及系统,基于MPC控制算法,对实时返回的位置偏差和角度偏差进行最优化控制,结合目标函数和约束条件进行最优求解得到当前时刻的AGV线速度和角速度,实现AGV路径跟踪。充分利用MPC算法结果鲁棒,适应场景广的优势,同时结合AGV实际需求忽略动力学进行计算简化,降低算力要求,实现AGV精准快速的路径跟踪。
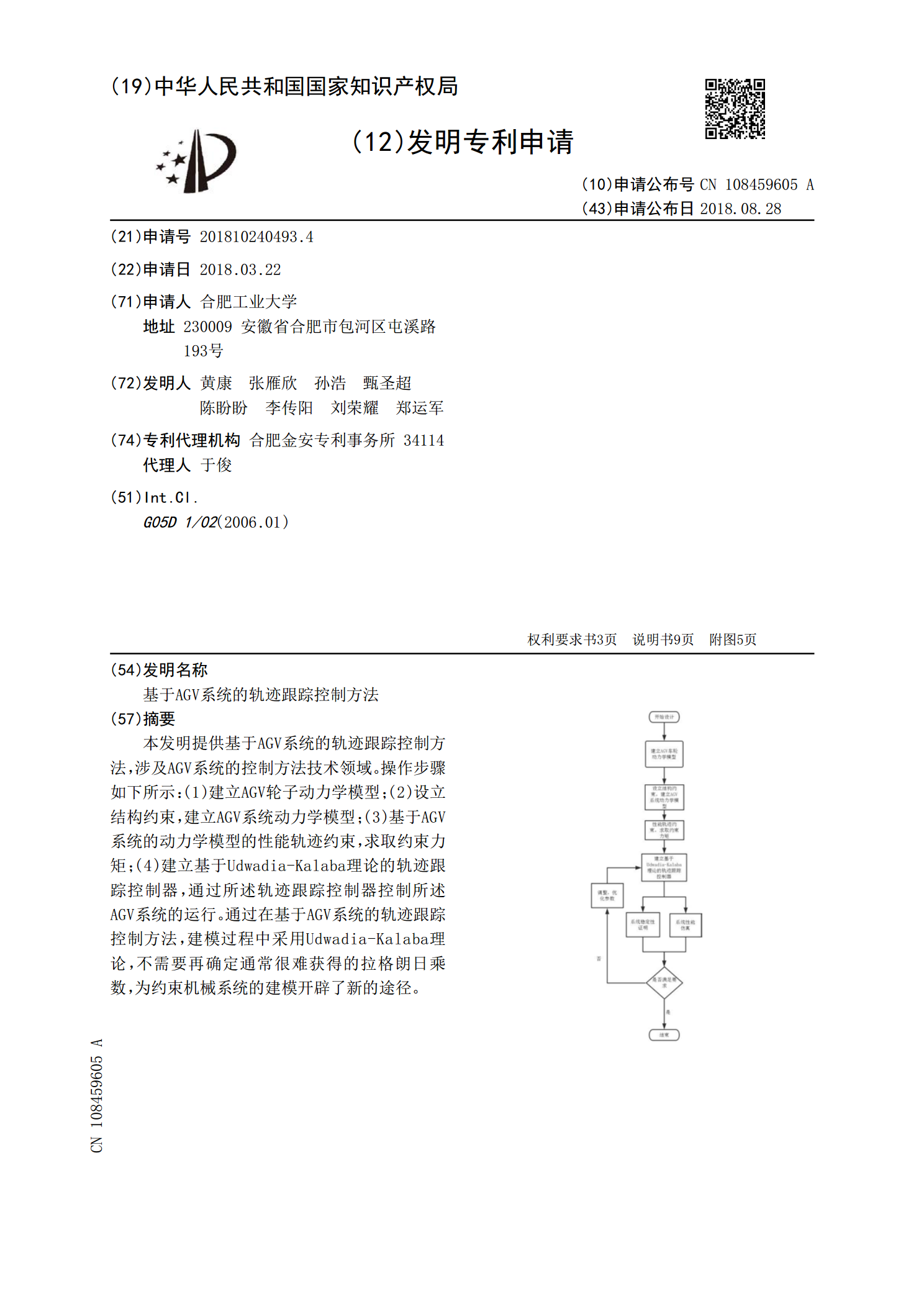
基于AGV系统的轨迹跟踪控制方法.pdf
本发明提供基于AGV系统的轨迹跟踪控制方法,涉及AGV系统的控制方法技术领域。操作步骤如下所示:(1)建立AGV轮子动力学模型;(2)设立结构约束,建立AGV系统动力学模型;(3)基于AGV系统的动力学模型的性能轨迹约束,求取约束力矩;(4)建立基于Udwadia‑Kalaba理论的轨迹跟踪控制器,通过所述轨迹跟踪控制器控制所述AGV系统的运行。通过在基于AGV系统的轨迹跟踪控制方法,建模过程中采用Udwadia‑Kalaba理论,不需要再确定通常很难获得的拉格朗日乘数,为约束机械系统的建模开辟了新的途径
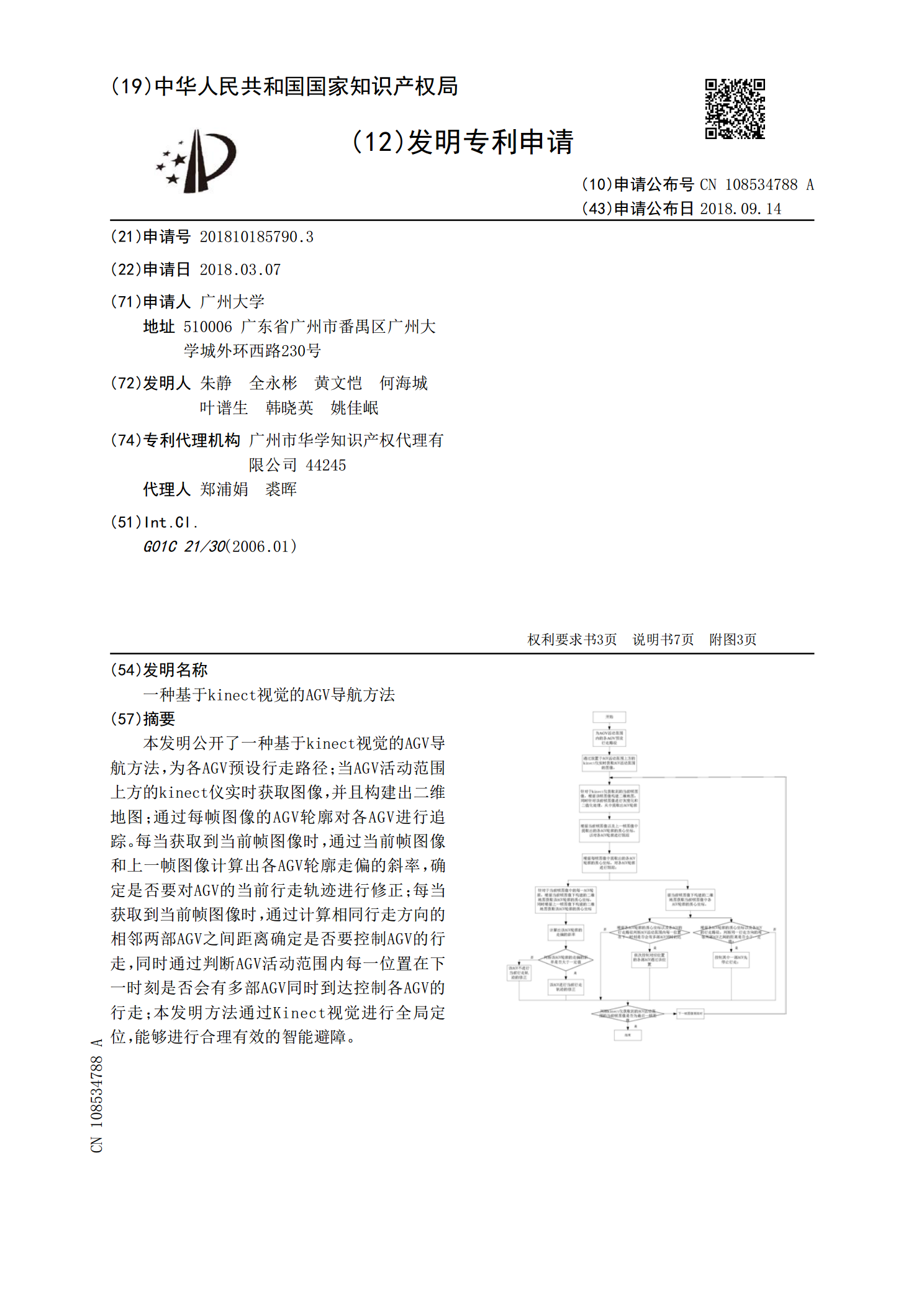
一种基于kinect视觉的AGV导航方法.pdf
本发明公开了一种基于kinect视觉的AGV导航方法,为各AGV预设行走路径;当AGV活动范围上方的kinect仪实时获取图像,并且构建出二维地图;通过每帧图像的AGV轮廓对各AGV进行追踪。每当获取到当前帧图像时,通过当前帧图像和上一帧图像计算出各AGV轮廓走偏的斜率,确定是否要对AGV的当前行走轨迹进行修正;每当获取到当前帧图像时,通过计算相同行走方向的相邻两部AGV之间距离确定是否要控制AGV的行走,同时通过判断AGV活动范围内每一位置在下一时刻是否会有多部AGV同时到达控制各AGV的行走;本发明方