
机器人视觉定位方法和装置、视觉标定方法和装置.pdf

邻家****ng


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

机器人视觉定位方法和装置、视觉标定方法和装置.pdf
本发明提出了一种机器人视觉定位方法和装置,该方法包括:获取目标图像,对所述目标图像进行预处理;根据预设的分割参数对图像进行特征分割,对分割后的图像进行滤波处理,对滤波后的图像进行连通域检测提取组成特征标志的亮斑,对提取的亮斑进行过滤处理,判断过滤后的亮斑数目是否符合预设的数目,若否,则重新调整分割参数,进行重新检测,若是,则识别亮斑轮廓线,判断识别出的亮斑轮廓线与预设的模板轮廓线是否匹配,若是,则输出识别出的特征标志。该方法通过自动调整分割参数,使得分割后的轮廓符合初始设置条件,适应光照条件不同的图像检测
机器视觉的标定方法、装置和计算机设备.pdf
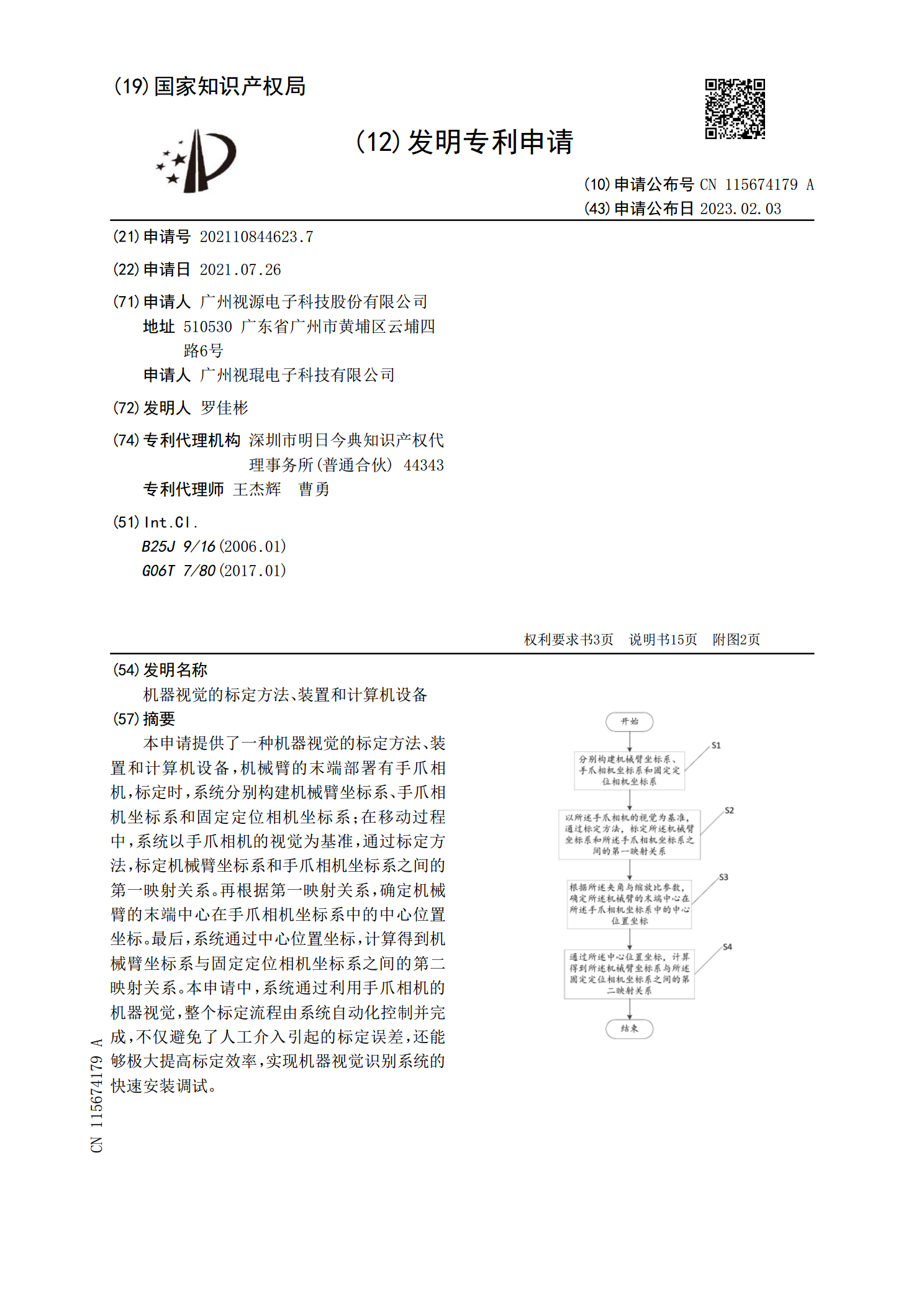
本申请提供了一种机器视觉的标定方法、装置和计算机设备,机械臂的末端部署有手爪相机,标定时,系统分别构建机械臂坐标系、手爪相机坐标系和固定定位相机坐标系;在移动过程中,系统以手爪相机的视觉为基准,通过标定方法,标定机械臂坐标系和手爪相机坐标系之间的第一映射关系。再根据第一映射关系,确定机械臂的末端中心在手爪相机坐标系中的中心位置坐标。最后,系统通过中心位置坐标,计算得到机械臂坐标系与固定定位相机坐标系之间的第二映射关系。本申请中,系统通过利用手爪相机的机器视觉,整个标定流程由系统自动化控制并完成,不仅避免了

基于多视角视觉的分布式目标定位方法、装置和电子设备.pdf
本发明涉及一种基于多视角视觉的分布式目标定位方法、装置和电子设备,基于多视角视觉的分布式目标定位方法包括如下步骤:建立分布式目标定位装置节点间的通信拓扑图模型;建立分布式目标定位问题模型;将分布式目标定位问题转化为最小平方误差(MSE)准则下的凸优化问题;基于双重分布式一致性次梯度算法解定位凸优化问题;检验分布式目标定位结果。本发明仅依靠多节点的相机图像和通讯邻居间的自组织通信,以较少的通信和计算代价,较高的收敛速率实现分布式去中心化对目标高精度定位。

用于无轨导航AGV的视觉定位方法以及装置和系统.pdf
本发明涉及用于无轨导航AGV的视觉定位方法以及装置和系统,该方法包括获取图像数据;对图像数据进行实时自适应二值化处理,获取二值化图像;矫正或扫描二值化图像,检测二值化图像内的轮廓,存储轮廓;剔除存储的轮廓中不符合要求的轮廓;提取符合要求的轮廓的特征以及质心;获取具体的位置信息。本发明通过图像传感器获取图像信息,提取标签信息,并输出给AGV相应的坐标、角度、标签信息,AGV通过提供的信息进行定位,在求平均阈值时采用全局求均值的方法,二值化后图像轮廓比较少,加快后期处理轮廓的速度,通过逻辑方式处理二维码的解码

交易视觉捕获装置、方法和系统.pdf
交易视觉捕获装置、方法和系统(“TVC”)通过TVC部件将移动装置位置坐标信息传送、实时现实视觉捕获和混合手势捕获转换成实时行为敏感产品购买相关信息、购物购买交易通知和电子收据。在一个实现中,TVC在用户进入商店时从用户移动装置获得用户检入信息。TVC基于用户检入信息提取用户标识符,并且针对用户简档访问数据库。TVC从访问的用户简档确定用户先前行为模式,并且从用户移动装置获得用户实时店内行为数据。