
一种基于侧环视鱼眼相机输入的多列车铰接角测量方法.pdf

依波****bc


1/10
2/10

3/10

4/10
5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于侧环视鱼眼相机输入的多列车铰接角测量方法.pdf
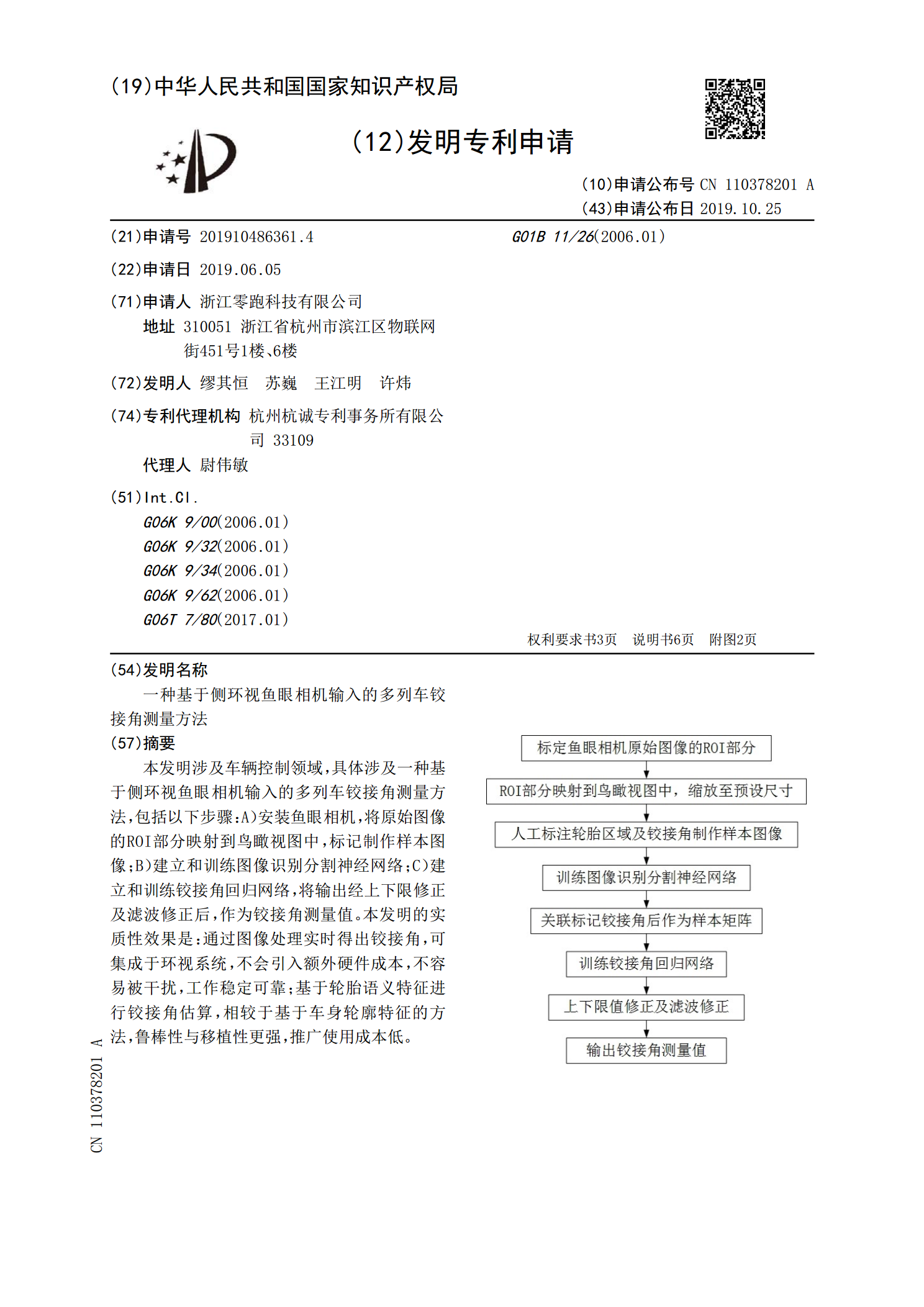
本发明涉及车辆控制领域,具体涉及一种基于侧环视鱼眼相机输入的多列车铰接角测量方法,包括以下步骤:A)安装鱼眼相机,将原始图像的ROI部分映射到鸟瞰视图中,标记制作样本图像;B)建立和训练图像识别分割神经网络;C)建立和训练铰接角回归网络,将输出经上下限修正及滤波修正后,作为铰接角测量值。本发明的实质性效果是:通过图像处理实时得出铰接角,可集成于环视系统,不会引入额外硬件成本,不容易被干扰,工作稳定可靠;基于轮胎语义特征进行铰接角估算,相较于基于车身轮廓特征的方法,鲁棒性与移植性更强,推广使用成本低。
一种基于后视双目相机的多列车铰接角测量方法.pdf
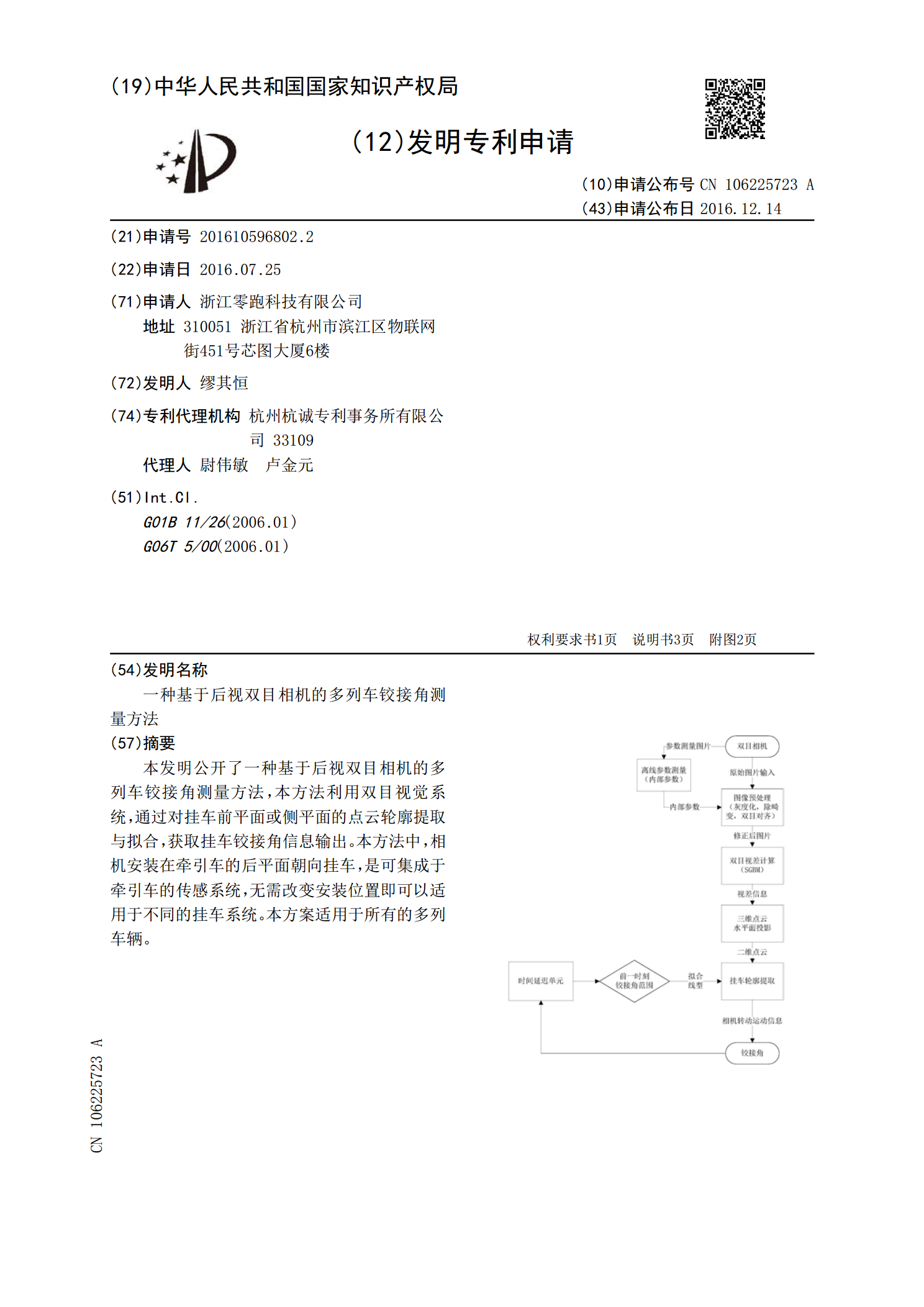
本发明公开了一种基于后视双目相机的多列车铰接角测量方法,本方法利用双目视觉系统,通过对挂车前平面或侧平面的点云轮廓提取与拟合,获取挂车铰接角信息输出。本方法中,相机安装在牵引车的后平面朝向挂车,是可集成于牵引车的传感系统,无需改变安装位置即可以适用于不同的挂车系统。本方案适用于所有的多列车辆。
基于鱼眼相机的环视图像合成方法和装置.pdf
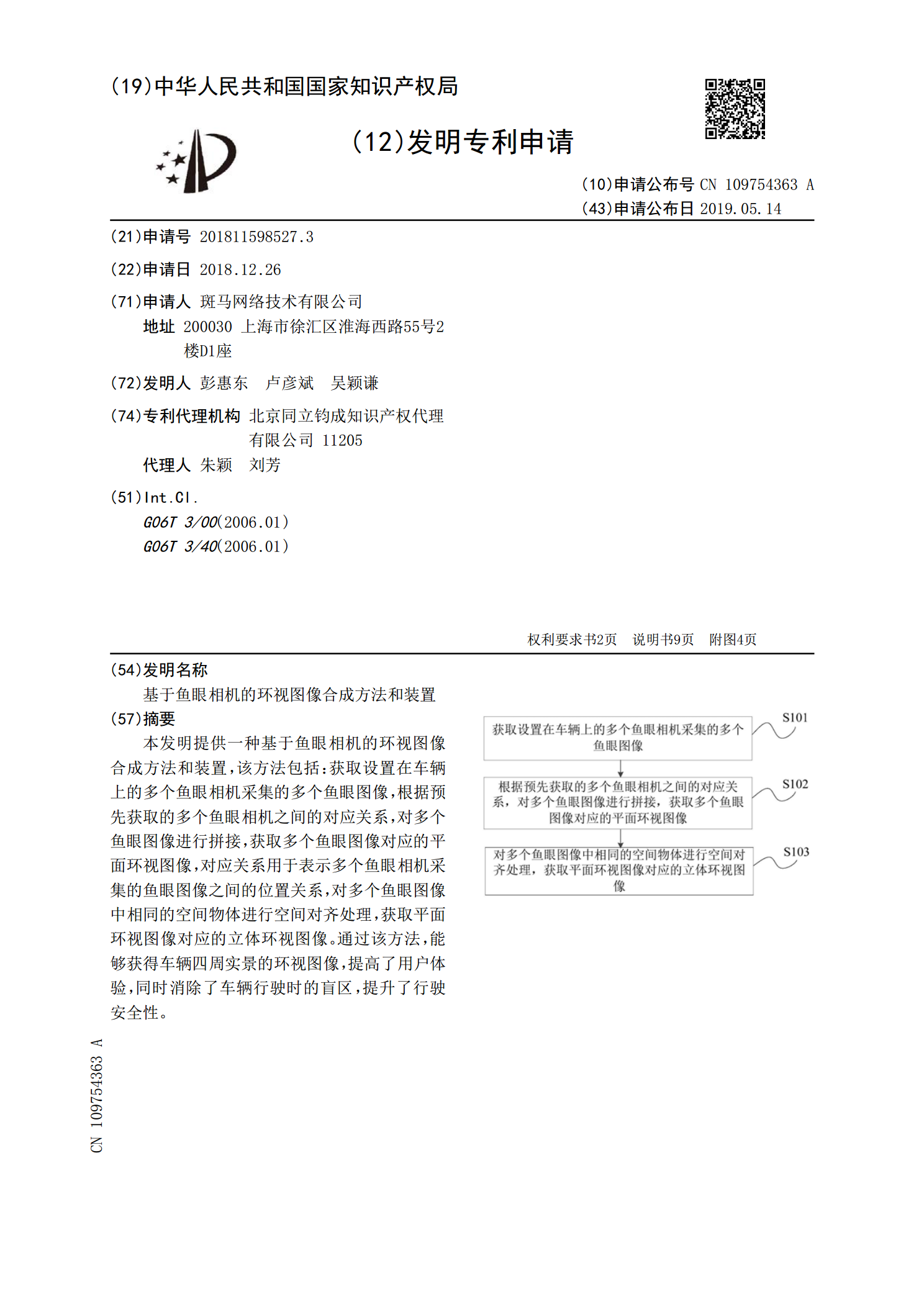
本发明提供一种基于鱼眼相机的环视图像合成方法和装置,该方法包括:获取设置在车辆上的多个鱼眼相机采集的多个鱼眼图像,根据预先获取的多个鱼眼相机之间的对应关系,对多个鱼眼图像进行拼接,获取多个鱼眼图像对应的平面环视图像,对应关系用于表示多个鱼眼相机采集的鱼眼图像之间的位置关系,对多个鱼眼图像中相同的空间物体进行空间对齐处理,获取平面环视图像对应的立体环视图像。通过该方法,能够获得车辆四周实景的环视图像,提高了用户体验,同时消除了车辆行驶时的盲区,提升了行驶安全性。

一种基于铰接角补偿的重型铰接车环视实现方法.pdf
本发明公开了一种基于铰接角补偿的重型铰接车环视实现方法,包括有,采集单元:用于采集车速、方向盘转角以及车辆档位信号,与处理终端电连接;处理终端:对采集单元采集的信息进行分析处理,与交互终端电连接;交互终端:用于向用户展示处理终端的输出结果;包括如下步骤:S1、离线系统标定;S2、系统应用模式设定;S3、在线铰接角补偿;S4、场景信息融合。该技术方案以多个辅助视角显示车辆周围环境,辅助驾驶员进行低速车辆操作,最大限度支持多传感以及智能视觉分析融合,以降低此类车辆的驾驶盲区,辅助驾驶员进行低速车辆操作,从而提
车载环视中基于单张图的鱼眼相机内参标定方法.pdf
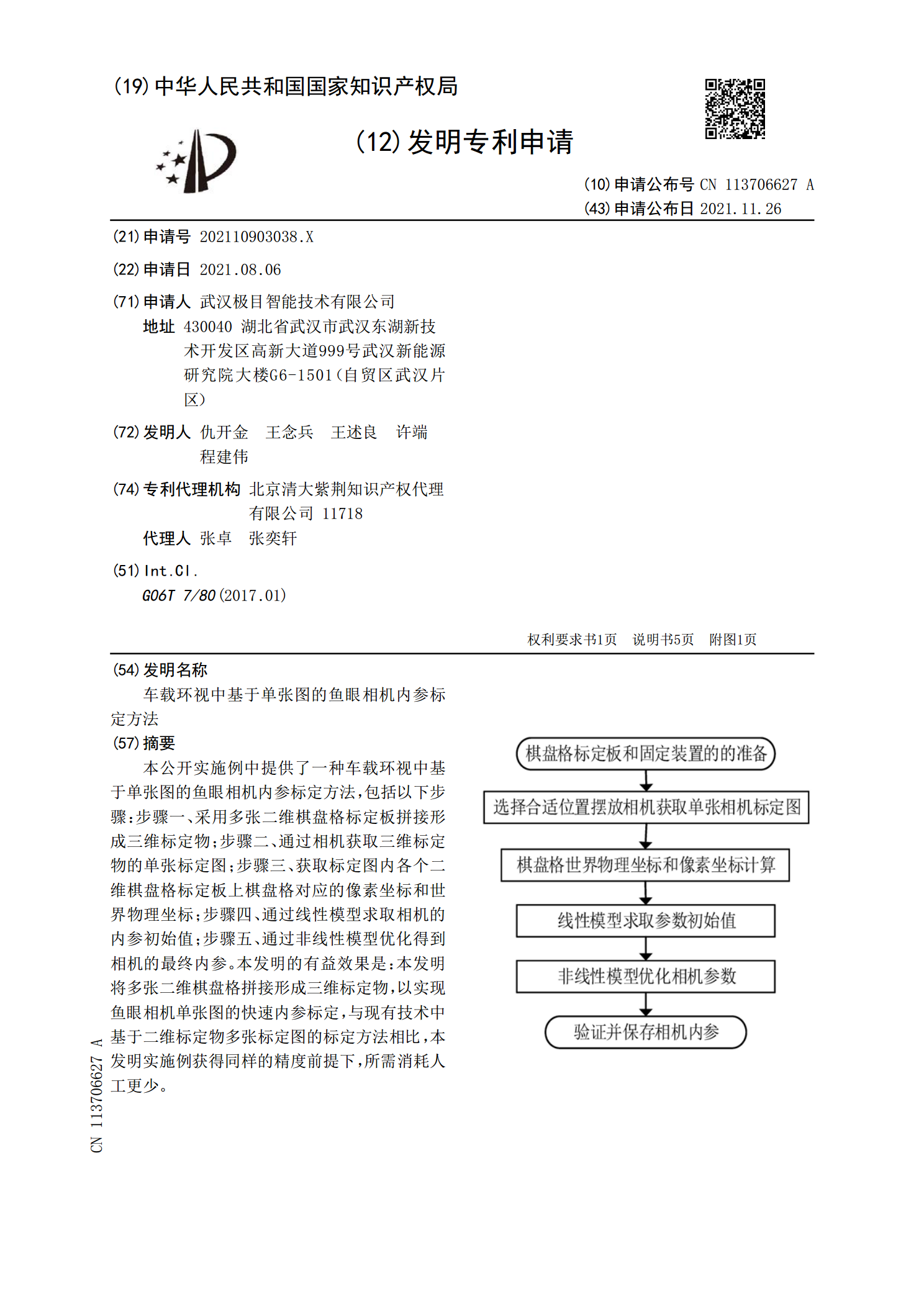
本公开实施例中提供了一种车载环视中基于单张图的鱼眼相机内参标定方法,包括以下步骤:步骤一、采用多张二维棋盘格标定板拼接形成三维标定物;步骤二、通过相机获取三维标定物的单张标定图;步骤三、获取标定图内各个二维棋盘格标定板上棋盘格对应的像素坐标和世界物理坐标;步骤四、通过线性模型求取相机的内参初始值;步骤五、通过非线性模型优化得到相机的最终内参。本发明的有益效果是:本发明将多张二维棋盘格拼接形成三维标定物,以实现鱼眼相机单张图的快速内参标定,与现有技术中基于二维标定物多张标定图的标定方法相比,本发明实施例获得