
一种基于后视双目相机的多列车铰接角测量方法.pdf

慧颖****23


1/7

2/7

3/7

4/7

5/7
6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于后视双目相机的多列车铰接角测量方法.pdf
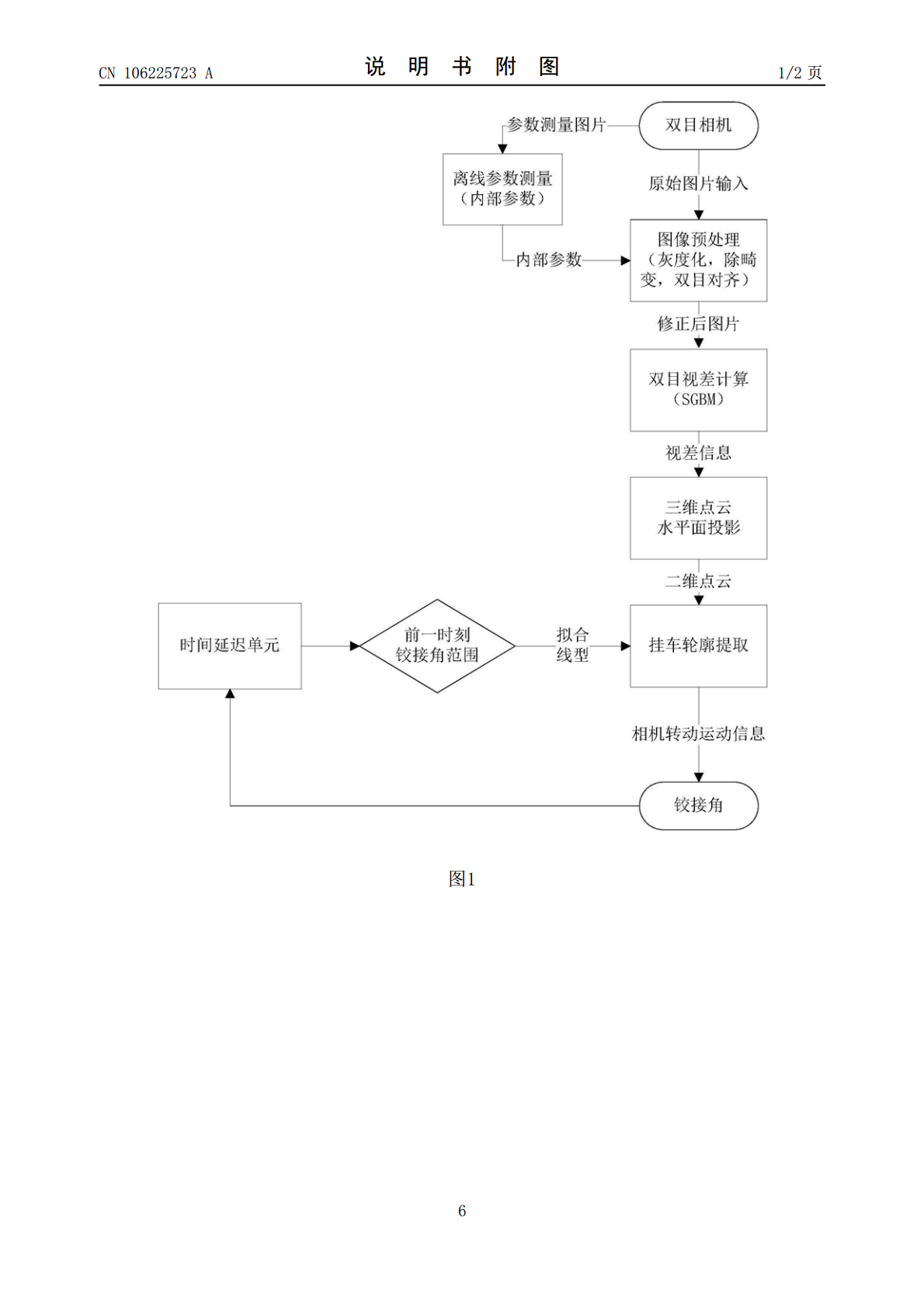
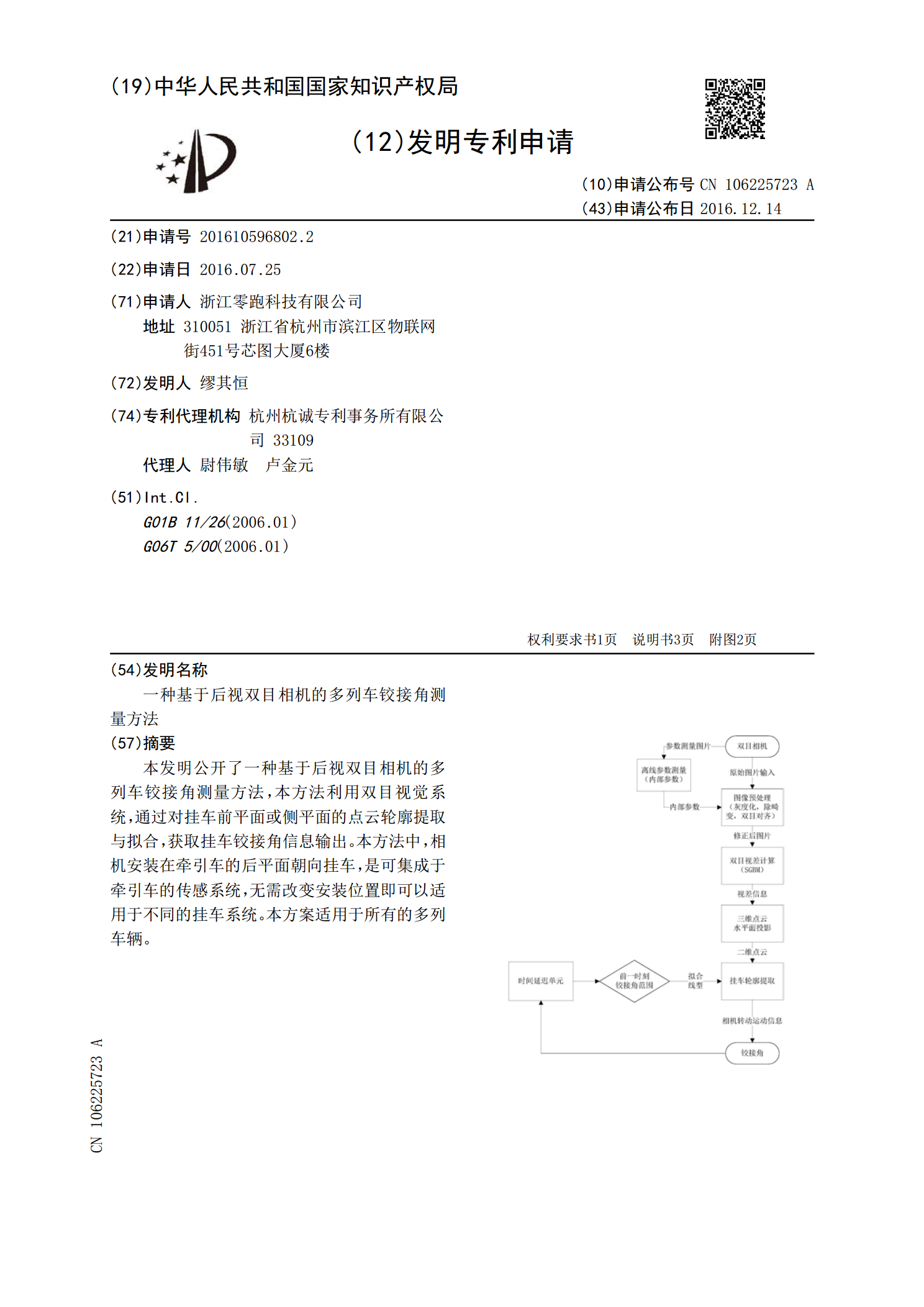
本发明公开了一种基于后视双目相机的多列车铰接角测量方法,本方法利用双目视觉系统,通过对挂车前平面或侧平面的点云轮廓提取与拟合,获取挂车铰接角信息输出。本方法中,相机安装在牵引车的后平面朝向挂车,是可集成于牵引车的传感系统,无需改变安装位置即可以适用于不同的挂车系统。本方案适用于所有的多列车辆。
一种基于侧环视鱼眼相机输入的多列车铰接角测量方法.pdf
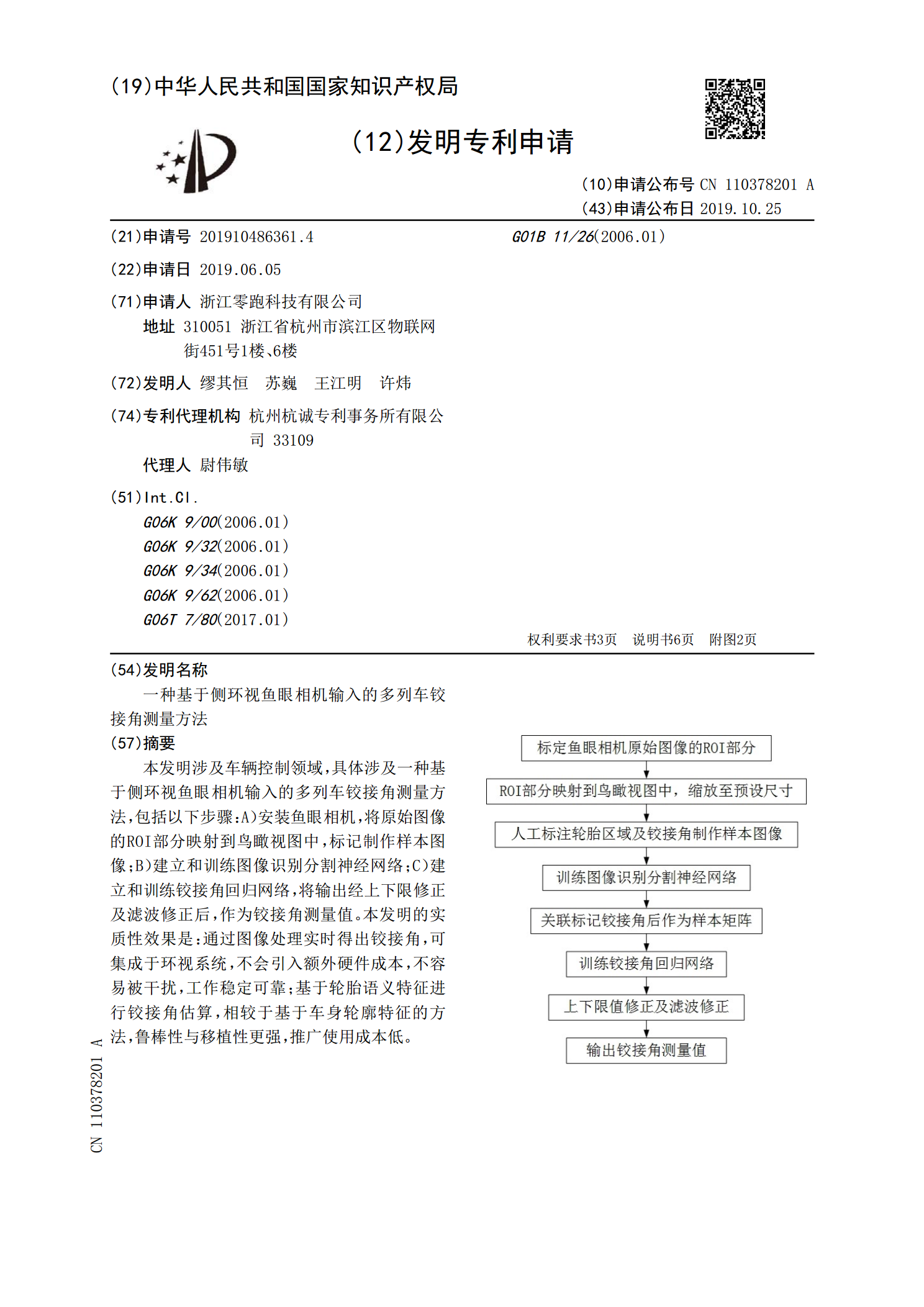
本发明涉及车辆控制领域,具体涉及一种基于侧环视鱼眼相机输入的多列车铰接角测量方法,包括以下步骤:A)安装鱼眼相机,将原始图像的ROI部分映射到鸟瞰视图中,标记制作样本图像;B)建立和训练图像识别分割神经网络;C)建立和训练铰接角回归网络,将输出经上下限修正及滤波修正后,作为铰接角测量值。本发明的实质性效果是:通过图像处理实时得出铰接角,可集成于环视系统,不会引入额外硬件成本,不容易被干扰,工作稳定可靠;基于轮胎语义特征进行铰接角估算,相较于基于车身轮廓特征的方法,鲁棒性与移植性更强,推广使用成本低。

一种基于双目相机的智能快递箱尺寸测量方法及系统.pdf
本发明实施例公开了一种基于双目相机的智能快递箱尺寸测量方法及系统,采用双目相机实现无接触的测量方式,可实现流水线上的实时测量;通过一系列图像处理算法,可以实时高效地从一张图像中检测出快递箱的长宽高,并且检测精度和鲁棒性高;本方案构建的系统可以以相同的精度测量不同尺寸大小的快递箱尺寸。
基于单后视相机及多雷达的自动泊车方法.pdf
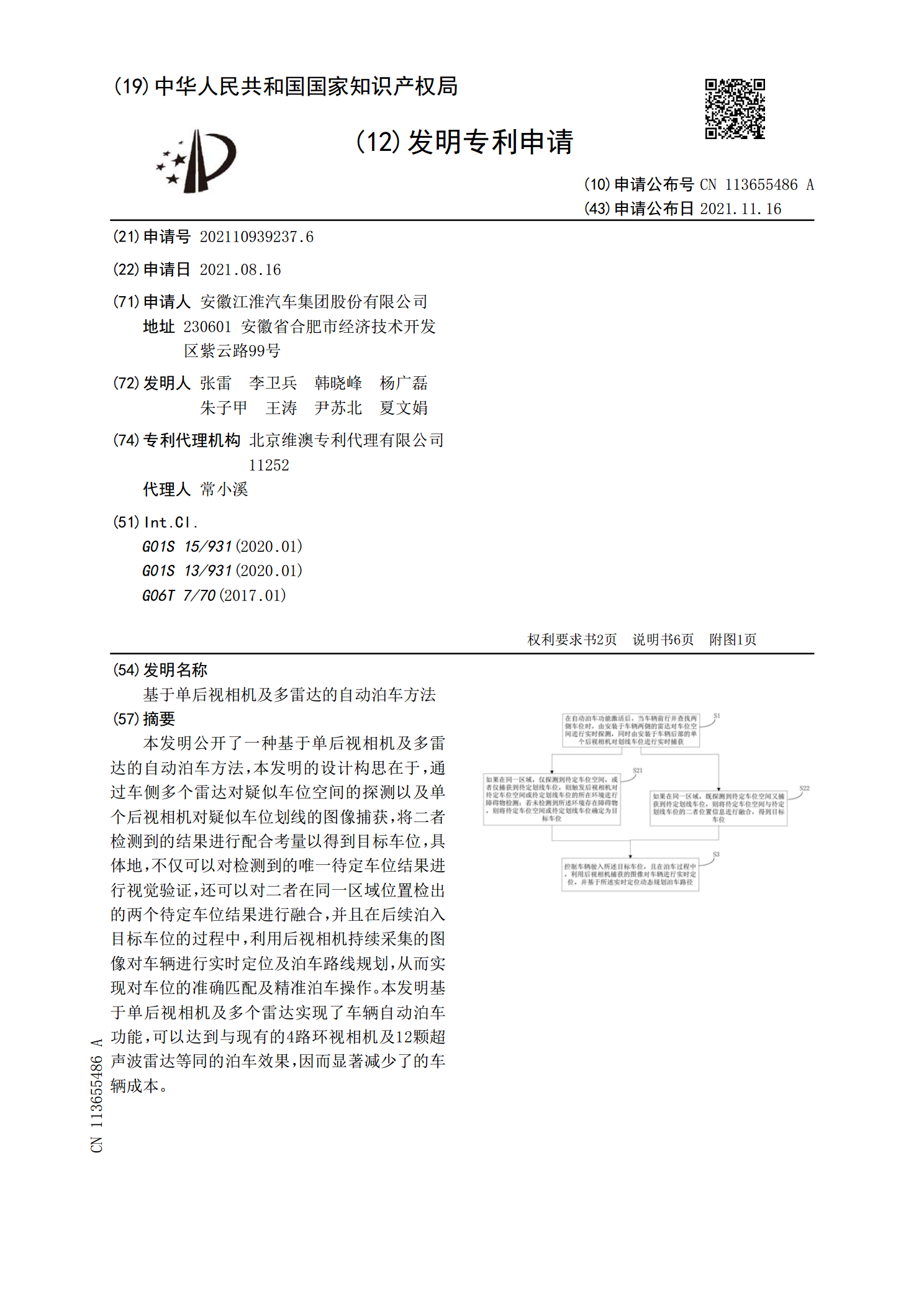
本发明公开了一种基于单后视相机及多雷达的自动泊车方法,本发明的设计构思在于,通过车侧多个雷达对疑似车位空间的探测以及单个后视相机对疑似车位划线的图像捕获,将二者检测到的结果进行配合考量以得到目标车位,具体地,不仅可以对检测到的唯一待定车位结果进行视觉验证,还可以对二者在同一区域位置检出的两个待定车位结果进行融合,并且在后续泊入目标车位的过程中,利用后视相机持续采集的图像对车辆进行实时定位及泊车路线规划,从而实现对车位的准确匹配及精准泊车操作。本发明基于单后视相机及多个雷达实现了车辆自动泊车功能,可以达到与
一种基于车载后视广角相机的盲区预警系统及方法.pdf
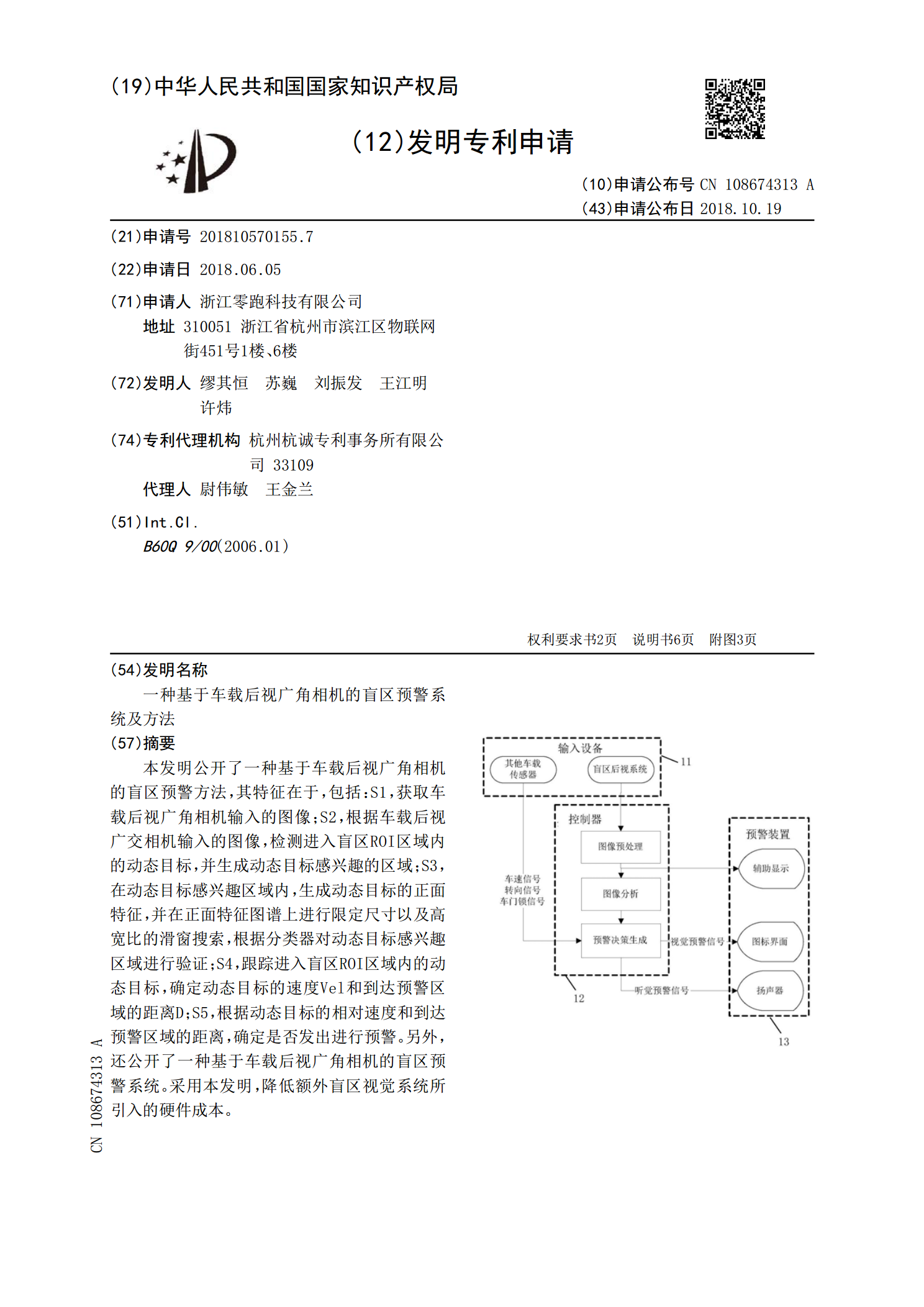
本发明公开了一种基于车载后视广角相机的盲区预警方法,其特征在于,包括:S1,获取车载后视广角相机输入的图像;S2,根据车载后视广交相机输入的图像,检测进入盲区ROI区域内的动态目标,并生成动态目标感兴趣的区域;S3,在动态目标感兴趣区域内,生成动态目标的正面特征,并在正面特征图谱上进行限定尺寸以及高宽比的滑窗搜索,根据分类器对动态目标感兴趣区域进行验证;S4,跟踪进入盲区ROI区域内的动态目标,确定动态目标的速度Vel和到达预警区域的距离D;S5,根据动态目标的相对速度和到达预警区域的距离,确定是否发出进