
柔性抓取装置.pdf

阳炎****找我

1/10

2/10
3/10
4/10

5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
柔性抓取装置.pdf
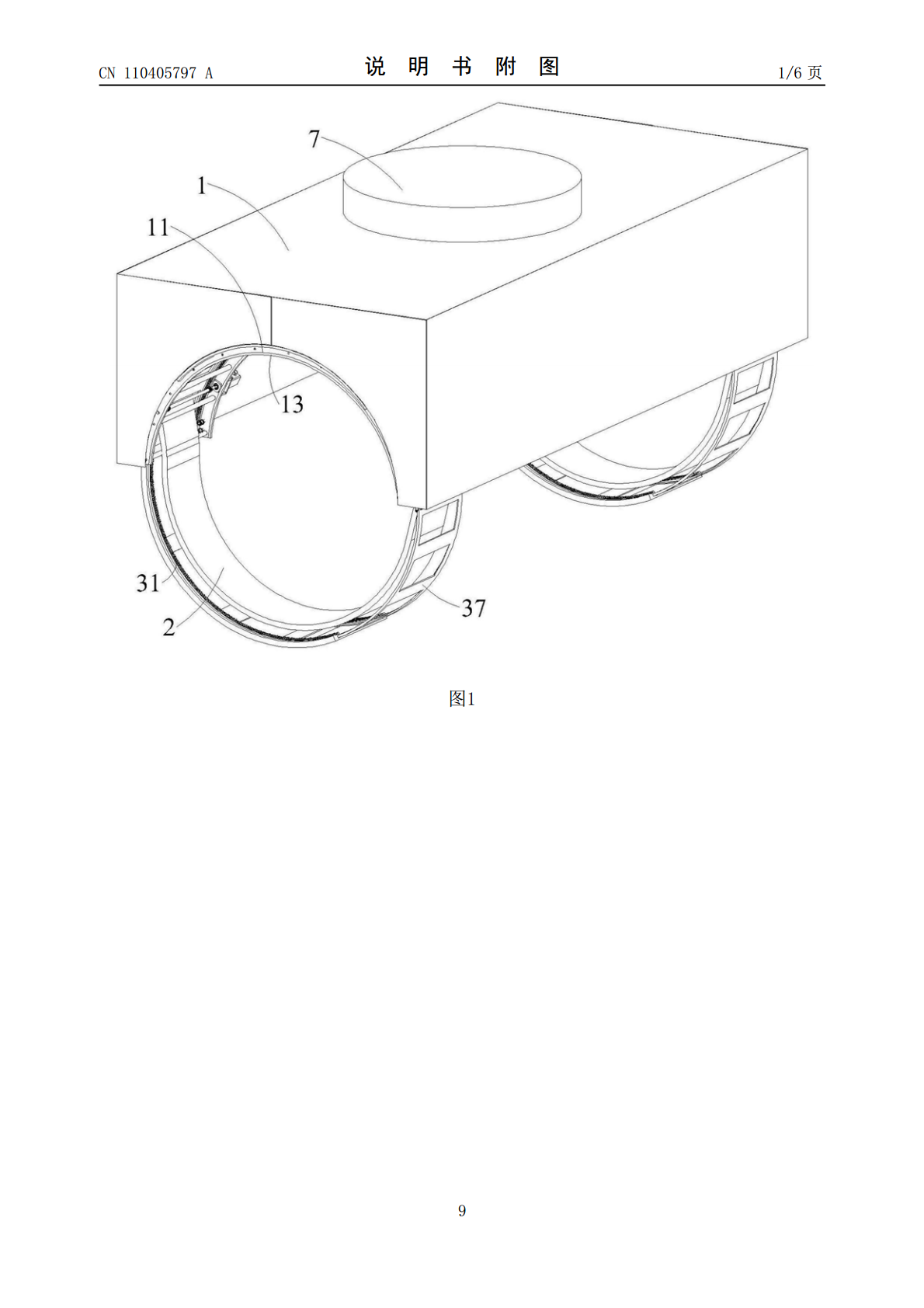
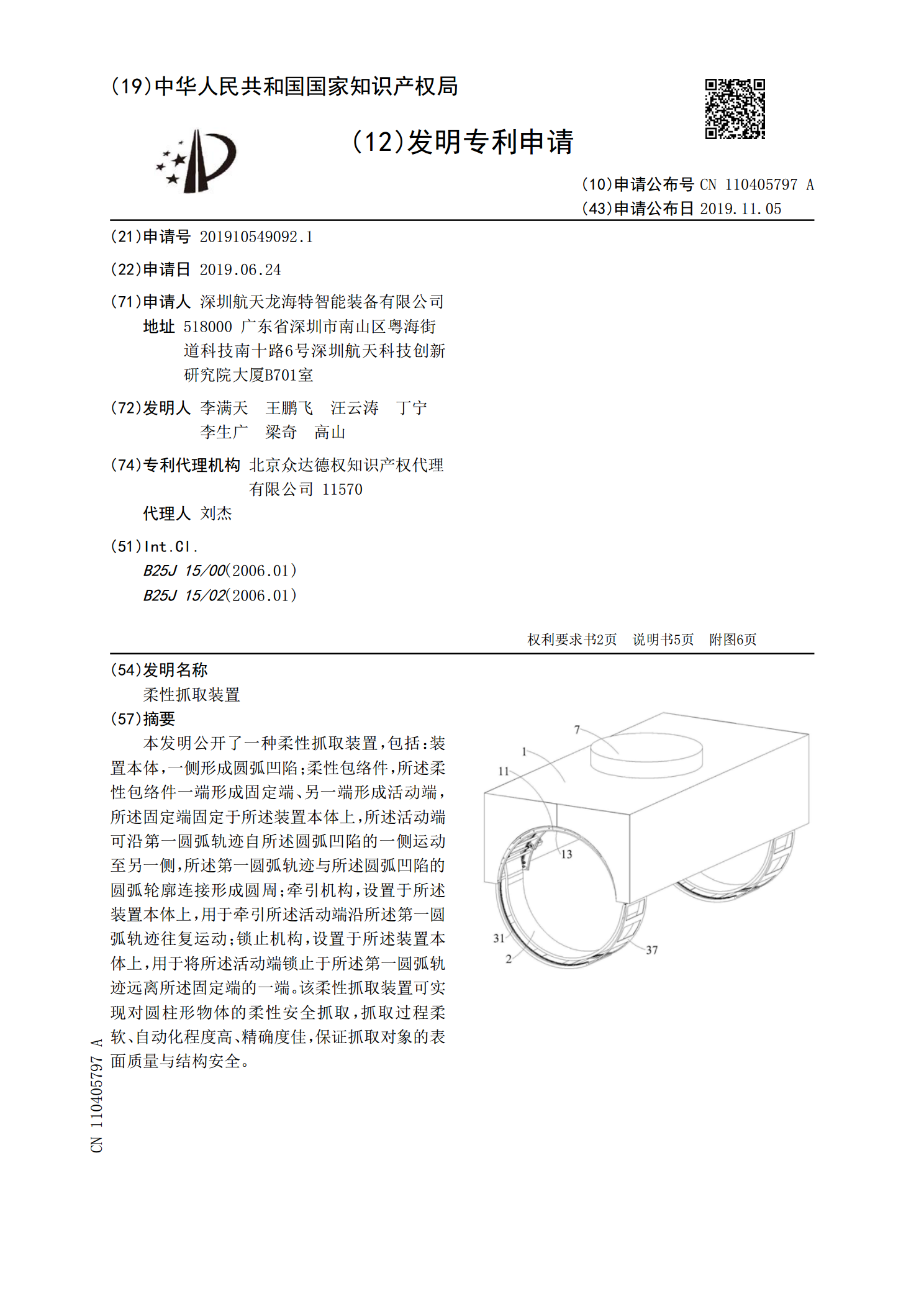
本发明公开了一种柔性抓取装置,包括:装置本体,一侧形成圆弧凹陷;柔性包络件,所述柔性包络件一端形成固定端、另一端形成活动端,所述固定端固定于所述装置本体上,所述活动端可沿第一圆弧轨迹自所述圆弧凹陷的一侧运动至另一侧,所述第一圆弧轨迹与所述圆弧凹陷的圆弧轮廓连接形成圆周;牵引机构,设置于所述装置本体上,用于牵引所述活动端沿所述第一圆弧轨迹往复运动;锁止机构,设置于所述装置本体上,用于将所述活动端锁止于所述第一圆弧轨迹远离所述固定端的一端。该柔性抓取装置可实现对圆柱形物体的柔性安全抓取,抓取过程柔软、自动化程
一种柔性抓取装置.pdf
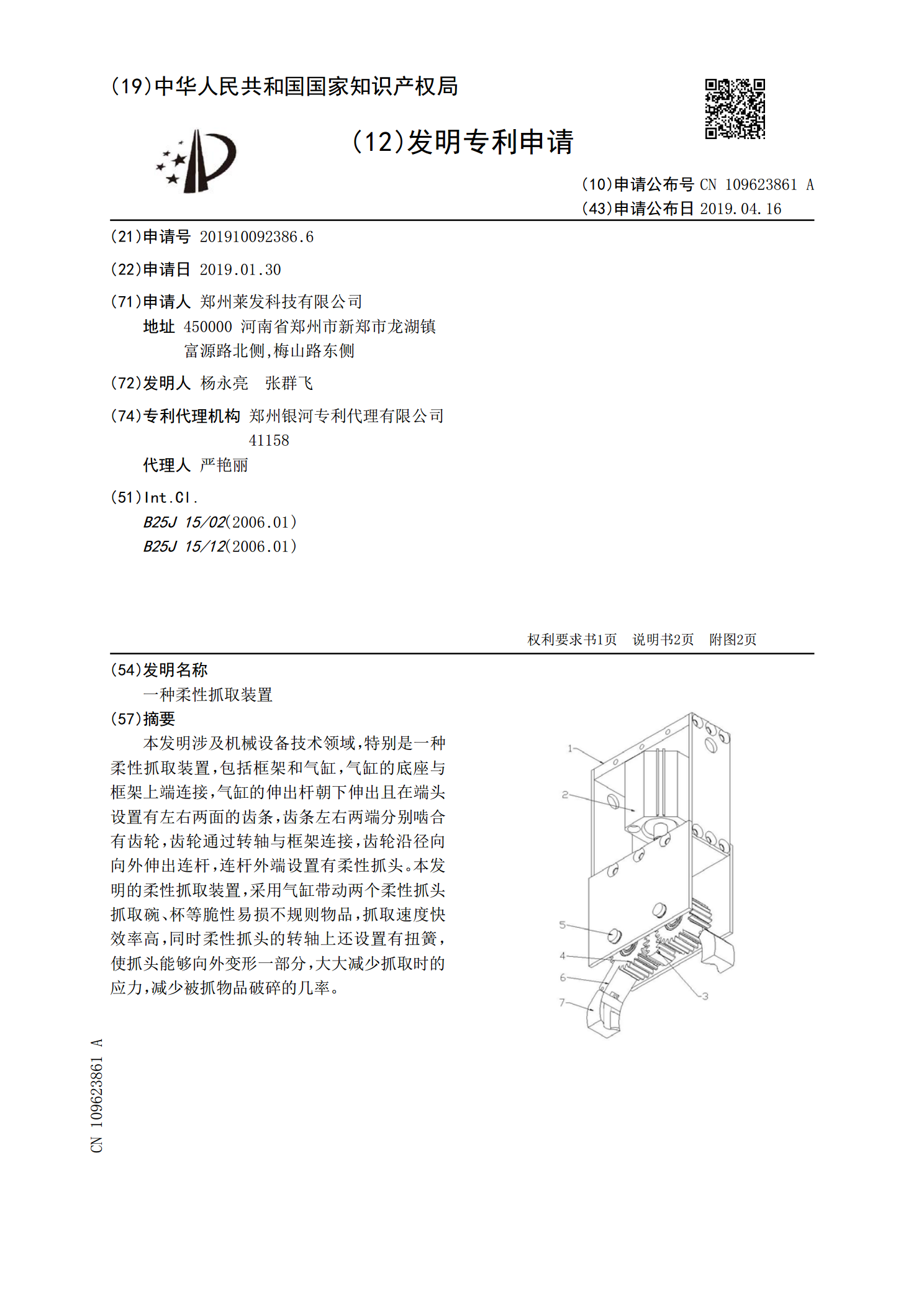
本发明涉及机械设备技术领域,特别是一种柔性抓取装置,包括框架和气缸,气缸的底座与框架上端连接,气缸的伸出杆朝下伸出且在端头设置有左右两面的齿条,齿条左右两端分别啮合有齿轮,齿轮通过转轴与框架连接,齿轮沿径向向外伸出连杆,连杆外端设置有柔性抓头。本发明的柔性抓取装置,采用气缸带动两个柔性抓头抓取碗、杯等脆性易损不规则物品,抓取速度快效率高,同时柔性抓头的转轴上还设置有扭簧,使抓头能够向外变形一部分,大大减少抓取时的应力,减少被抓物品破碎的几率。
一种仿象鼻结构柔性抓取装置.pdf
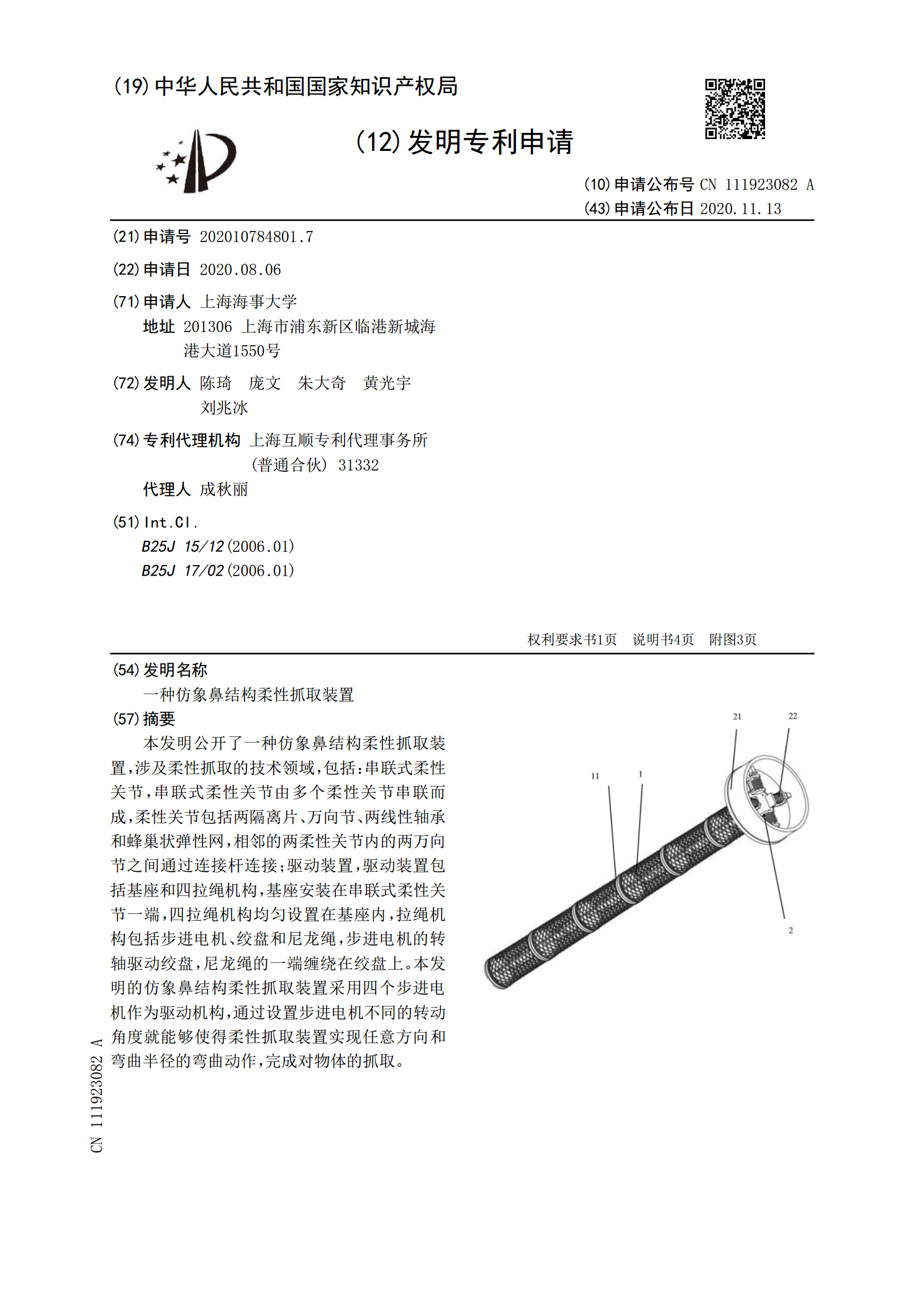
本发明公开了一种仿象鼻结构柔性抓取装置,涉及柔性抓取的技术领域,包括:串联式柔性关节,串联式柔性关节由多个柔性关节串联而成,柔性关节包括两隔离片、万向节、两线性轴承和蜂巢状弹性网,相邻的两柔性关节内的两万向节之间通过连接杆连接;驱动装置,驱动装置包括基座和四拉绳机构,基座安装在串联式柔性关节一端,四拉绳机构均匀设置在基座内,拉绳机构包括步进电机、绞盘和尼龙绳,步进电机的转轴驱动绞盘,尼龙绳的一端缠绕在绞盘上。本发明的仿象鼻结构柔性抓取装置采用四个步进电机作为驱动机构,通过设置步进电机不同的转动角度就能够使
柔性掌面自适应快速抓取机器人手装置.pdf
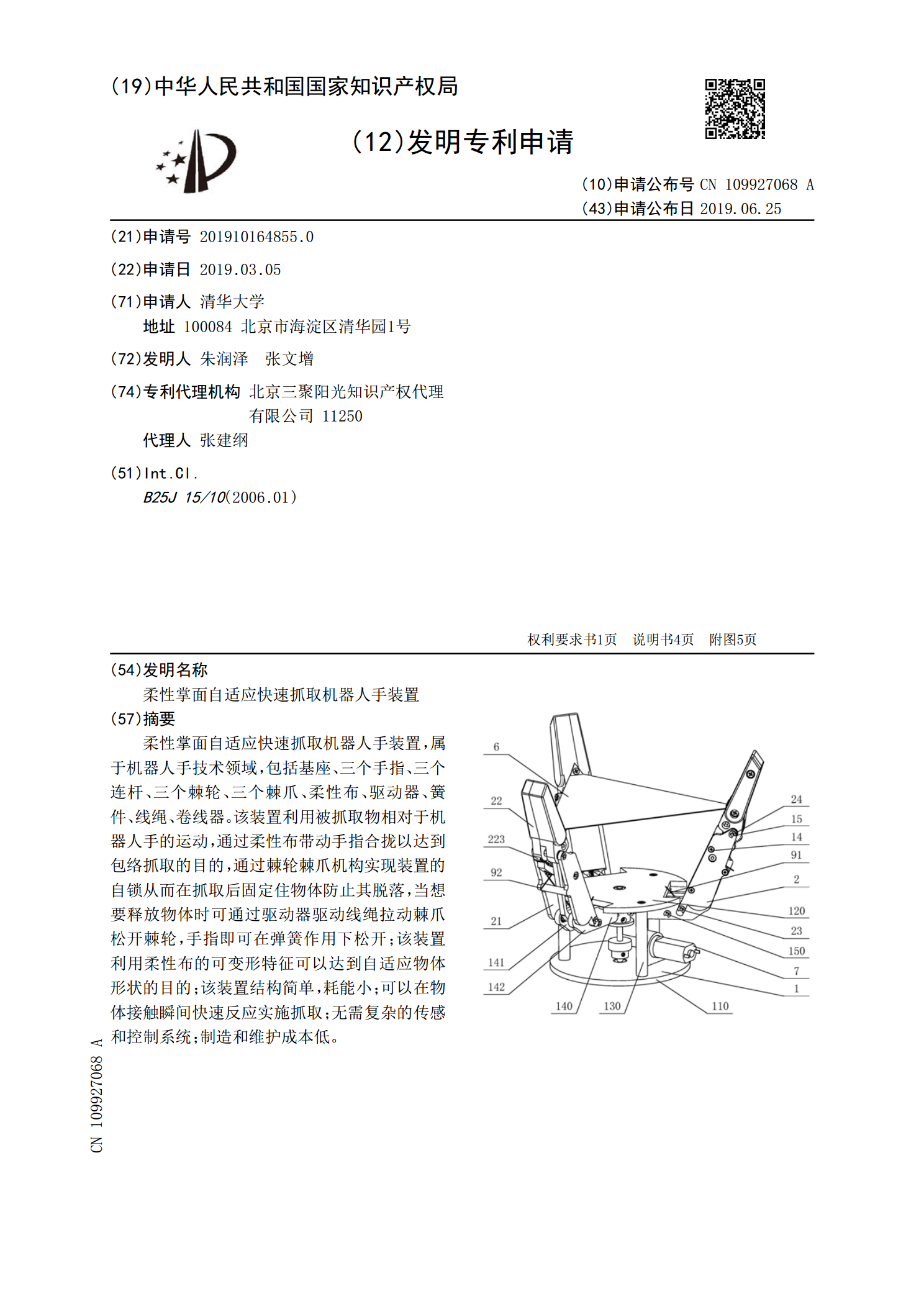
柔性掌面自适应快速抓取机器人手装置,属于机器人手技术领域,包括基座、三个手指、三个连杆、三个棘轮、三个棘爪、柔性布、驱动器、簧件、线绳、卷线器。该装置利用被抓取物相对于机器人手的运动,通过柔性布带动手指合拢以达到包络抓取的目的,通过棘轮棘爪机构实现装置的自锁从而在抓取后固定住物体防止其脱落,当想要释放物体时可通过驱动器驱动线绳拉动棘爪松开棘轮,手指即可在弹簧作用下松开;该装置利用柔性布的可变形特征可以达到自适应物体形状的目的;该装置结构简单,耗能小;可以在物体接触瞬间快速反应实施抓取;无需复杂的传感和控制

锥齿轮柔性件复合抓取机器人手指装置.pdf
锥齿轮柔性件复合抓取机器人手指装置,属于仿人机器手技术领域,包括基座、电机、减速器、近关节轴、中部指段、远关节轴、末端指段、三个锥齿轮、主动轮、从动轮、两个传动件和簧件。本发明装置采用单个电机、多个锥齿轮、交叉柔性件传动机构及簧件等综合实现了复合欠驱动抓取效果:手指先耦合转动抓向物体然后再自适应抓取物体;抓取过程拟人,动作灵巧,抓取物体稳定,可自动适应抓取不同尺寸、形状的物体,对控制系统要求低,操控容易;同时结构简单、紧凑,能量损耗小,传动效率高,成本低廉,装配维护便利,且外形与人手指相近,适用于仿人机器