
一种仿象鼻结构柔性抓取装置.pdf

是你****平呀

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种仿象鼻结构柔性抓取装置.pdf
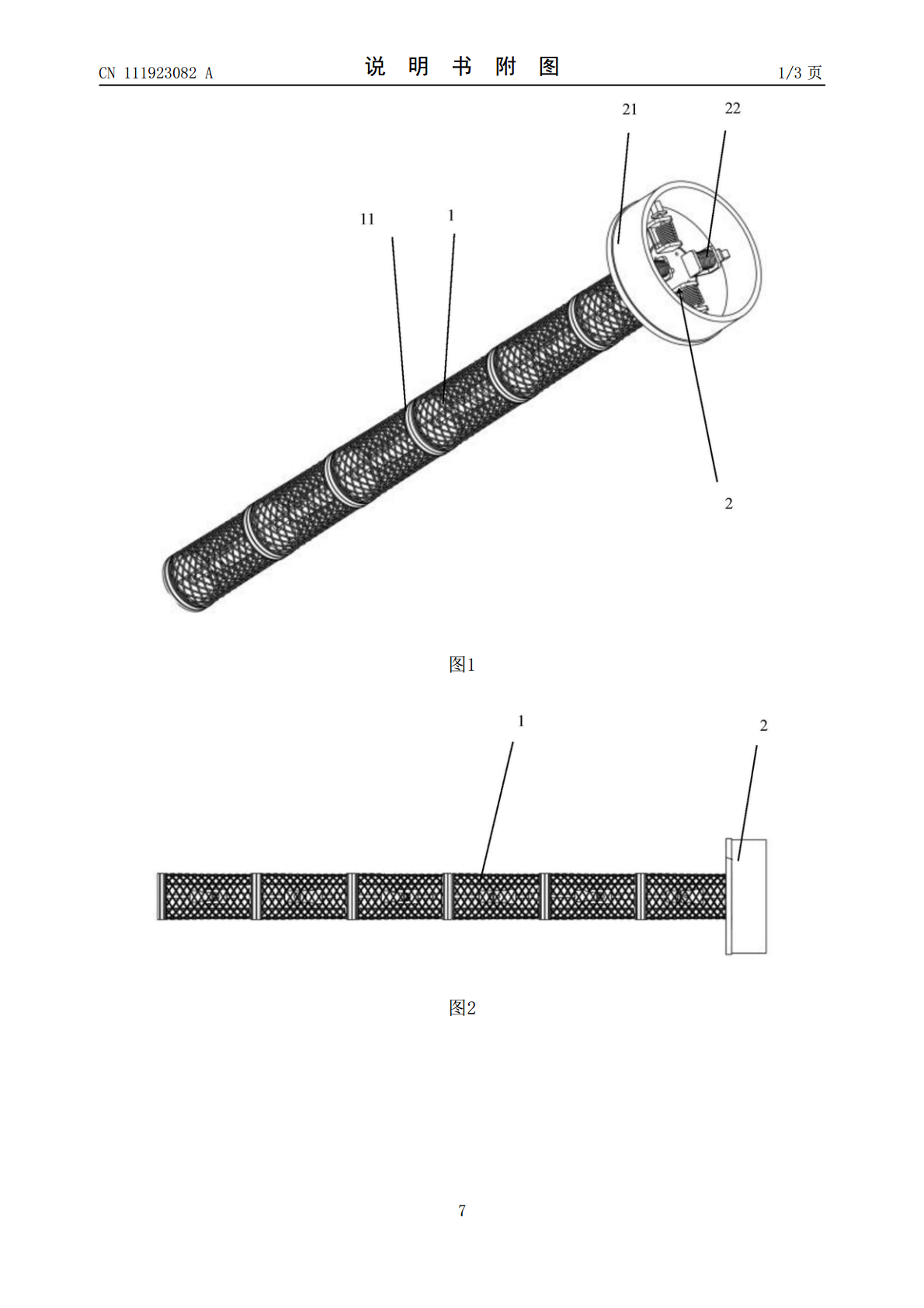
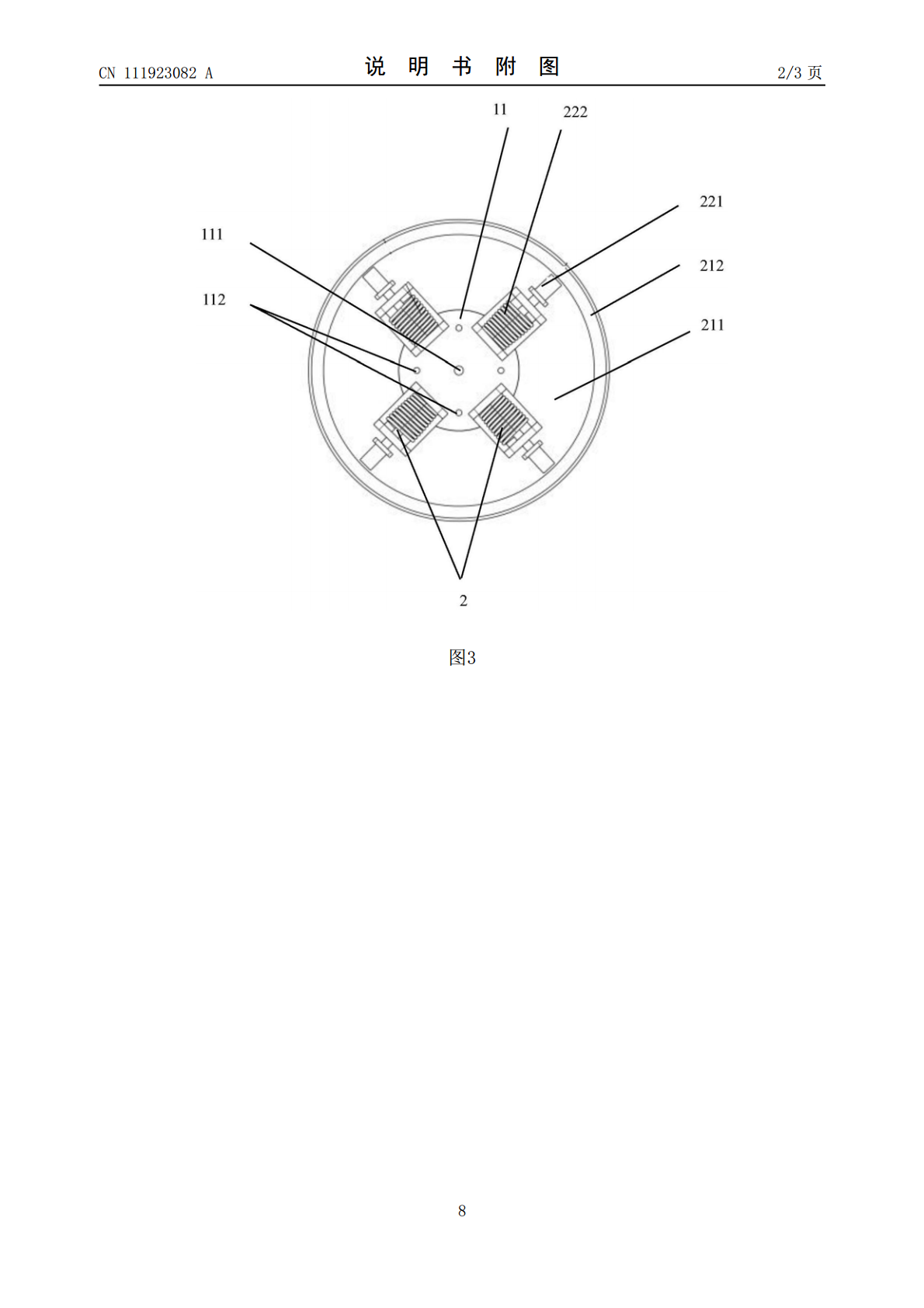
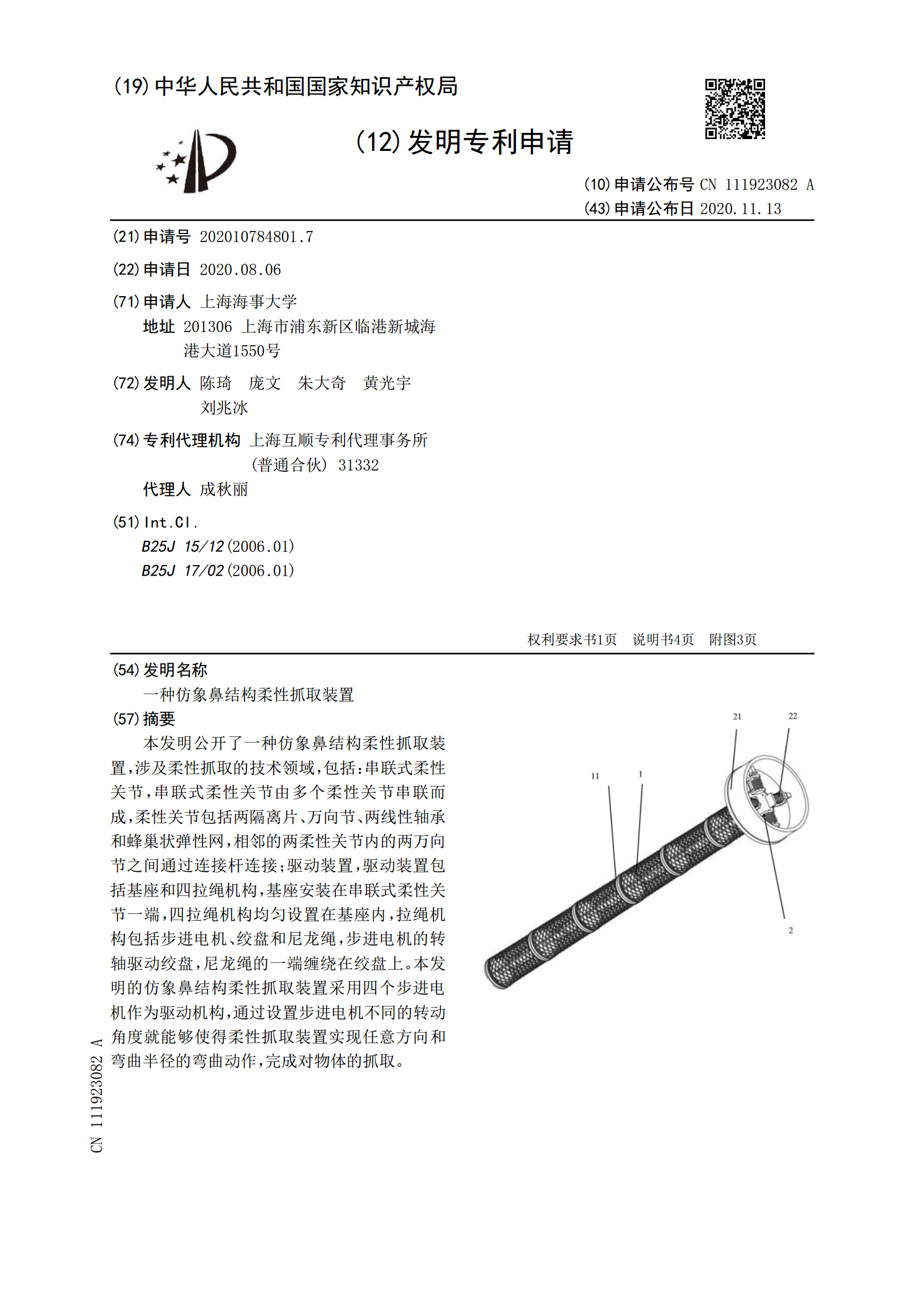
本发明公开了一种仿象鼻结构柔性抓取装置,涉及柔性抓取的技术领域,包括:串联式柔性关节,串联式柔性关节由多个柔性关节串联而成,柔性关节包括两隔离片、万向节、两线性轴承和蜂巢状弹性网,相邻的两柔性关节内的两万向节之间通过连接杆连接;驱动装置,驱动装置包括基座和四拉绳机构,基座安装在串联式柔性关节一端,四拉绳机构均匀设置在基座内,拉绳机构包括步进电机、绞盘和尼龙绳,步进电机的转轴驱动绞盘,尼龙绳的一端缠绕在绞盘上。本发明的仿象鼻结构柔性抓取装置采用四个步进电机作为驱动机构,通过设置步进电机不同的转动角度就能够使
一种柔性抓取装置.pdf
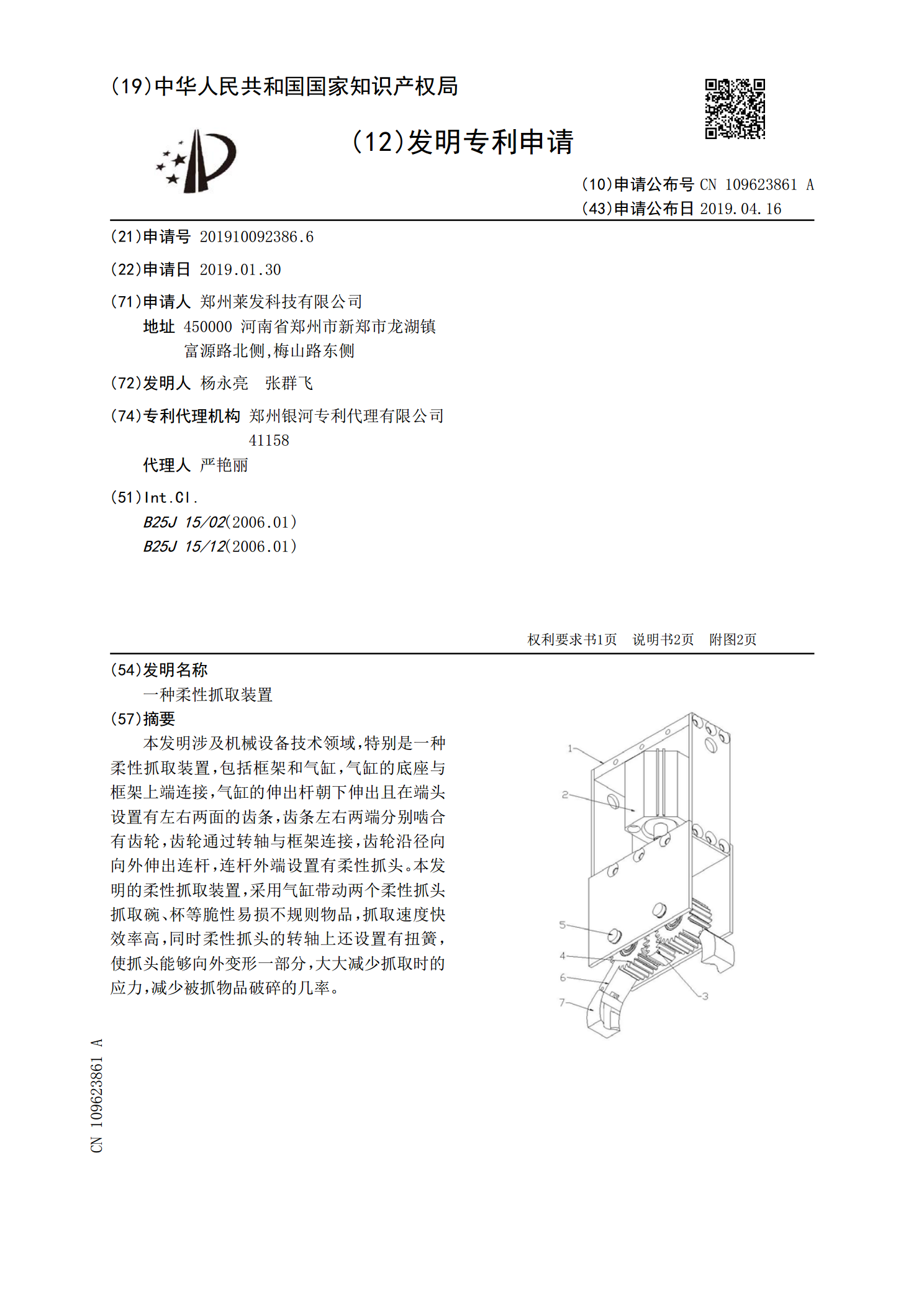
本发明涉及机械设备技术领域,特别是一种柔性抓取装置,包括框架和气缸,气缸的底座与框架上端连接,气缸的伸出杆朝下伸出且在端头设置有左右两面的齿条,齿条左右两端分别啮合有齿轮,齿轮通过转轴与框架连接,齿轮沿径向向外伸出连杆,连杆外端设置有柔性抓头。本发明的柔性抓取装置,采用气缸带动两个柔性抓头抓取碗、杯等脆性易损不规则物品,抓取速度快效率高,同时柔性抓头的转轴上还设置有扭簧,使抓头能够向外变形一部分,大大减少抓取时的应力,减少被抓物品破碎的几率。
一种仿象鼻的柔性机械臂及其应用.pdf
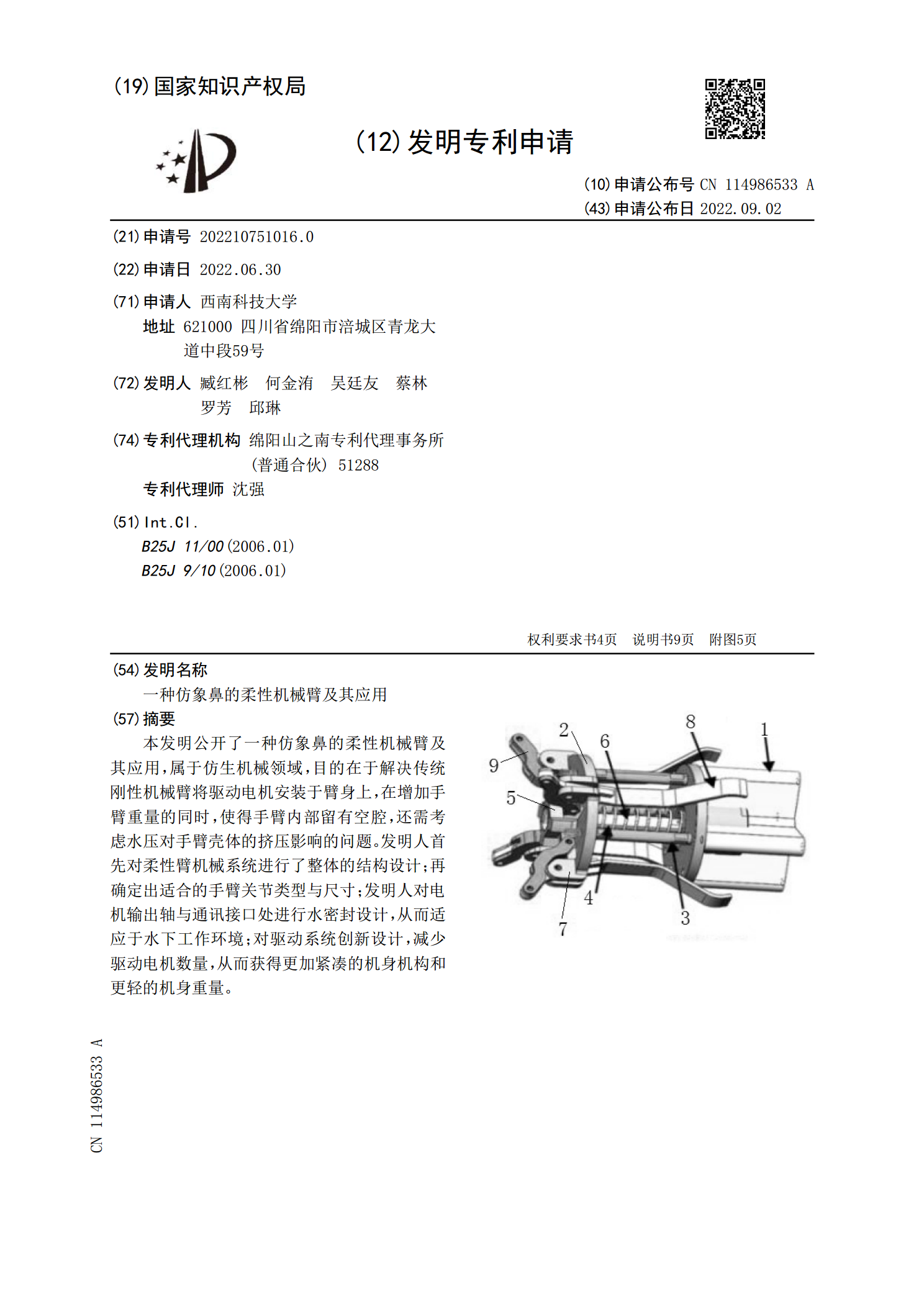
本发明公开了一种仿象鼻的柔性机械臂及其应用,属于仿生机械领域,目的在于解决传统刚性机械臂将驱动电机安装于臂身上,在增加手臂重量的同时,使得手臂内部留有空腔,还需考虑水压对手臂壳体的挤压影响的问题。发明人首先对柔性臂机械系统进行了整体的结构设计;再确定出适合的手臂关节类型与尺寸;发明人对电机输出轴与通讯接口处进行水密封设计,从而适应于水下工作环境;对驱动系统创新设计,减少驱动电机数量,从而获得更加紧凑的机身机构和更轻的机身重量。
柔性抓取装置.pdf
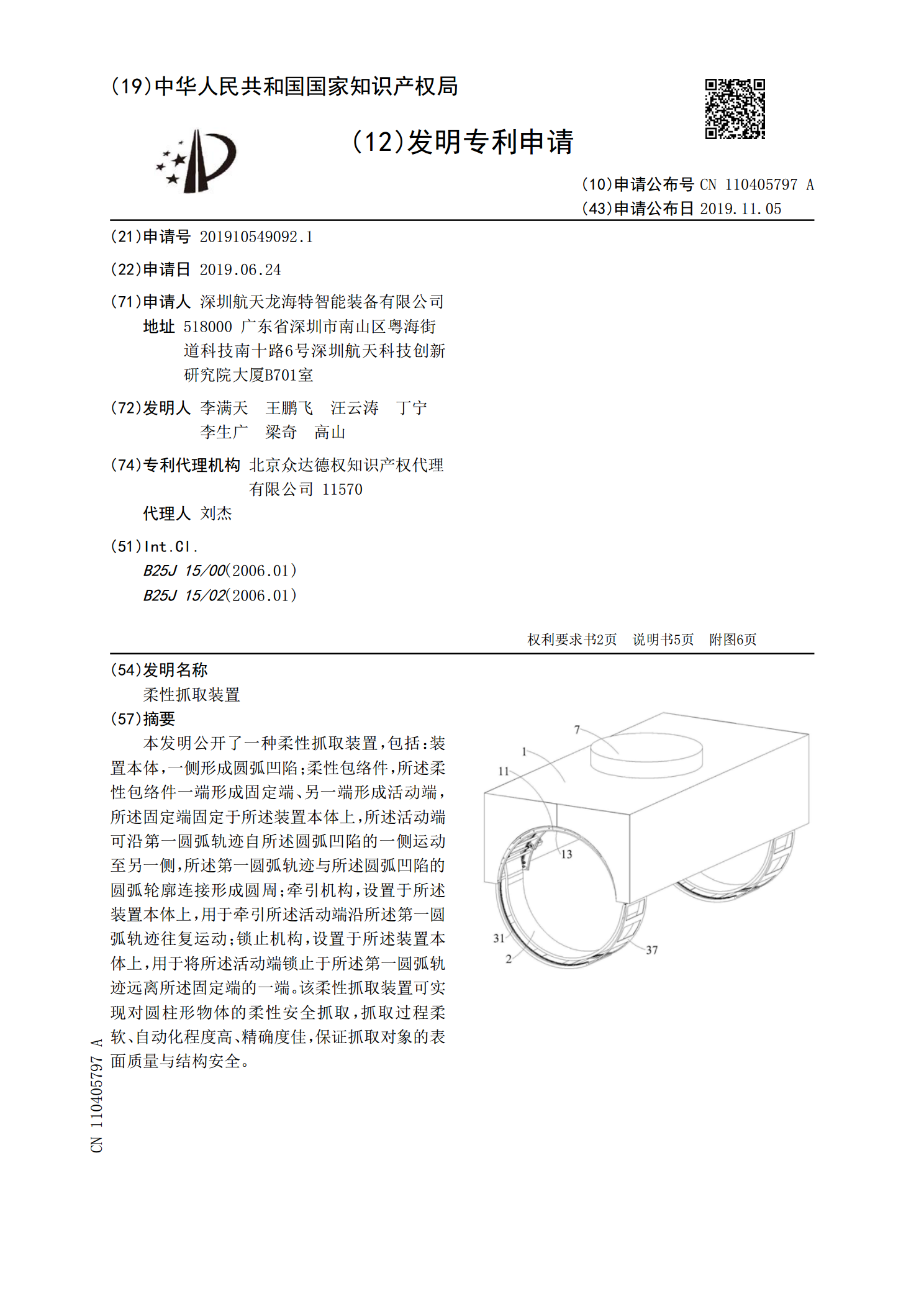
本发明公开了一种柔性抓取装置,包括:装置本体,一侧形成圆弧凹陷;柔性包络件,所述柔性包络件一端形成固定端、另一端形成活动端,所述固定端固定于所述装置本体上,所述活动端可沿第一圆弧轨迹自所述圆弧凹陷的一侧运动至另一侧,所述第一圆弧轨迹与所述圆弧凹陷的圆弧轮廓连接形成圆周;牵引机构,设置于所述装置本体上,用于牵引所述活动端沿所述第一圆弧轨迹往复运动;锁止机构,设置于所述装置本体上,用于将所述活动端锁止于所述第一圆弧轨迹远离所述固定端的一端。该柔性抓取装置可实现对圆柱形物体的柔性安全抓取,抓取过程柔软、自动化程
一种仿鱿鱼柔性喷流推进装置.pdf
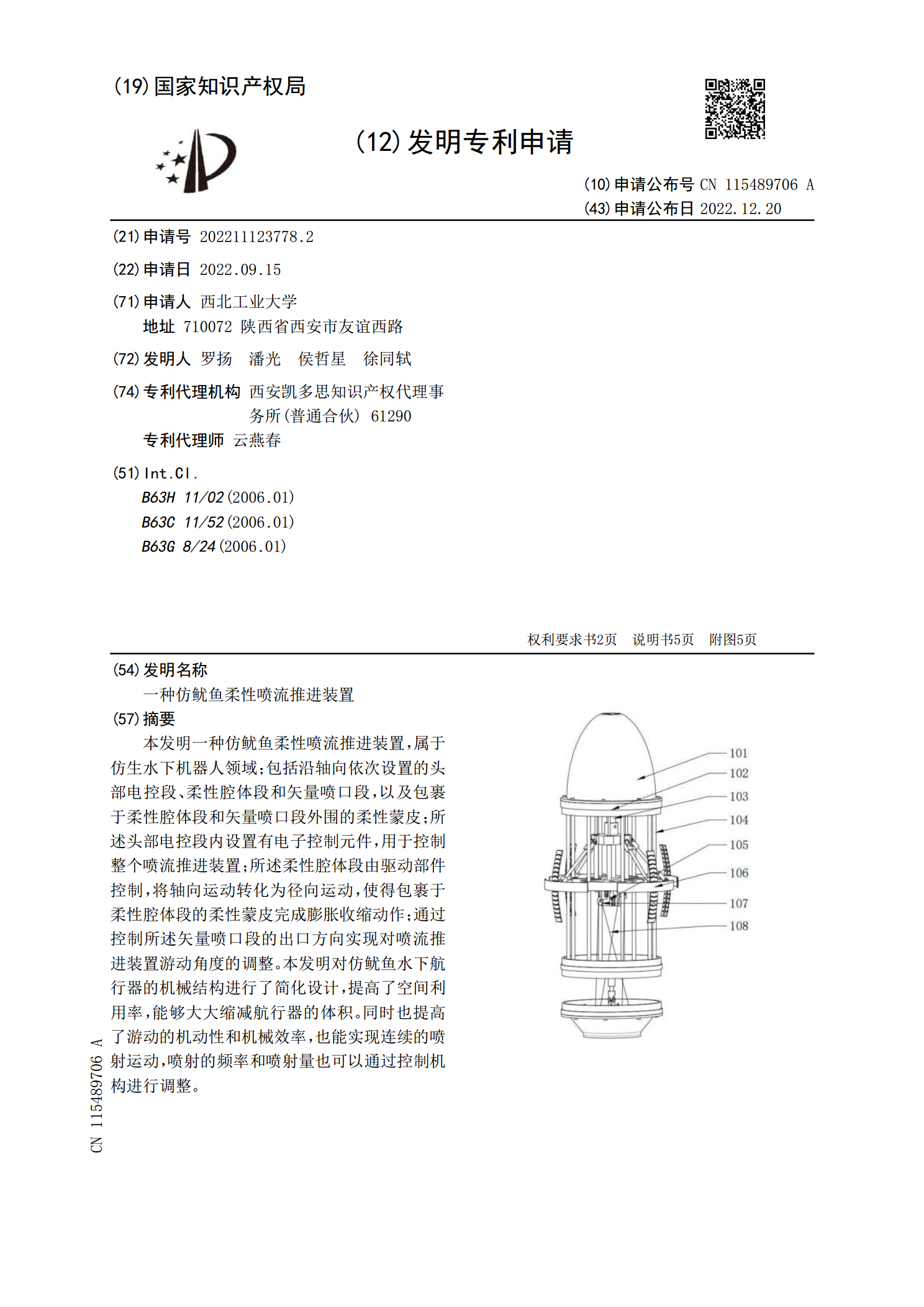
本发明一种仿鱿鱼柔性喷流推进装置,属于仿生水下机器人领域;包括沿轴向依次设置的头部电控段、柔性腔体段和矢量喷口段,以及包裹于柔性腔体段和矢量喷口段外围的柔性蒙皮;所述头部电控段内设置有电子控制元件,用于控制整个喷流推进装置;所述柔性腔体段由驱动部件控制,将轴向运动转化为径向运动,使得包裹于柔性腔体段的柔性蒙皮完成膨胀收缩动作;通过控制所述矢量喷口段的出口方向实现对喷流推进装置游动角度的调整。本发明对仿鱿鱼水下航行器的机械结构进行了简化设计,提高了空间利用率,能够大大缩减航行器的体积。同时也提高了游动的机动