
柔性掌面自适应快速抓取机器人手装置.pdf

猫巷****盟主


1/10

2/10
3/10

4/10
5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
柔性掌面自适应快速抓取机器人手装置.pdf
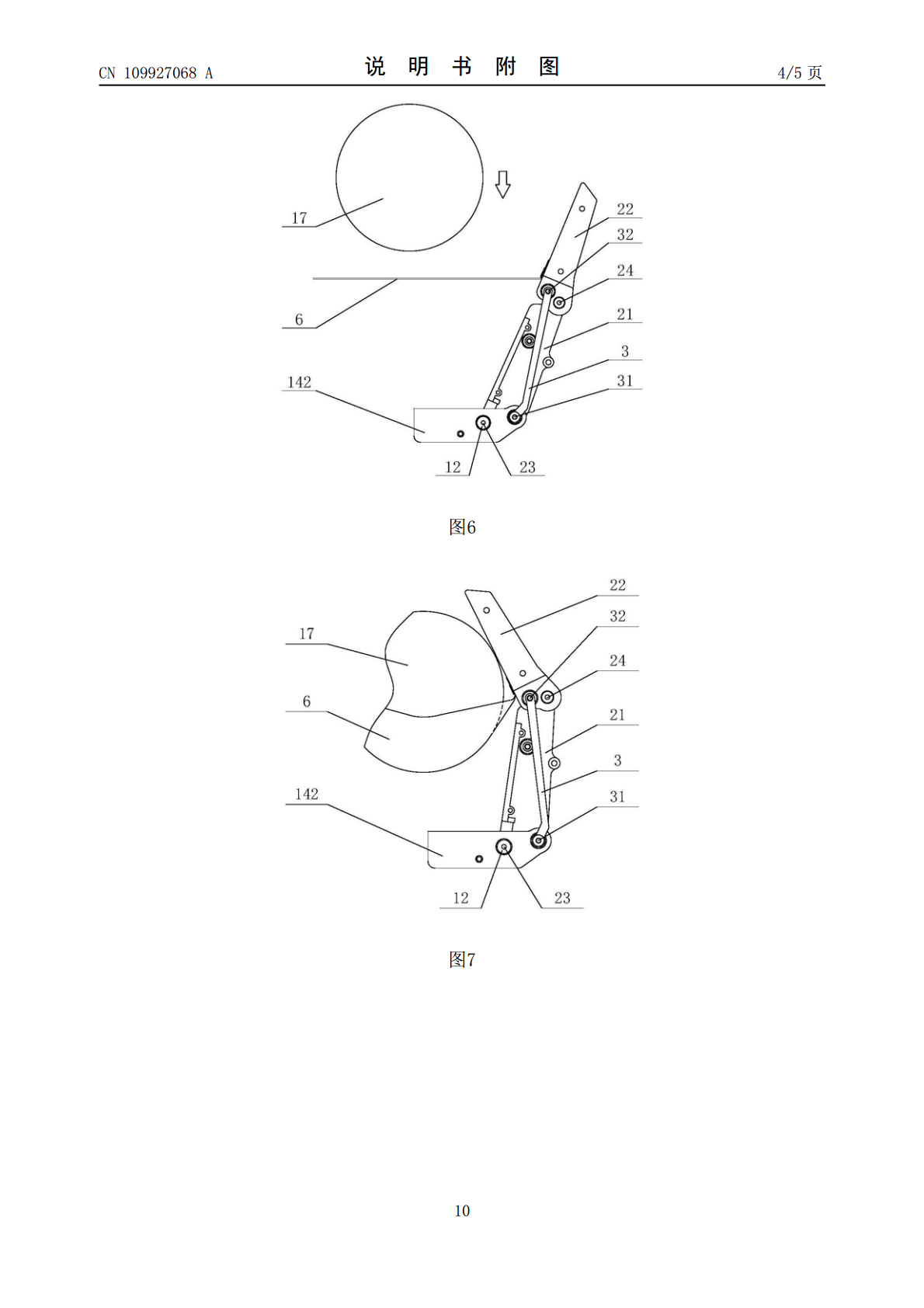
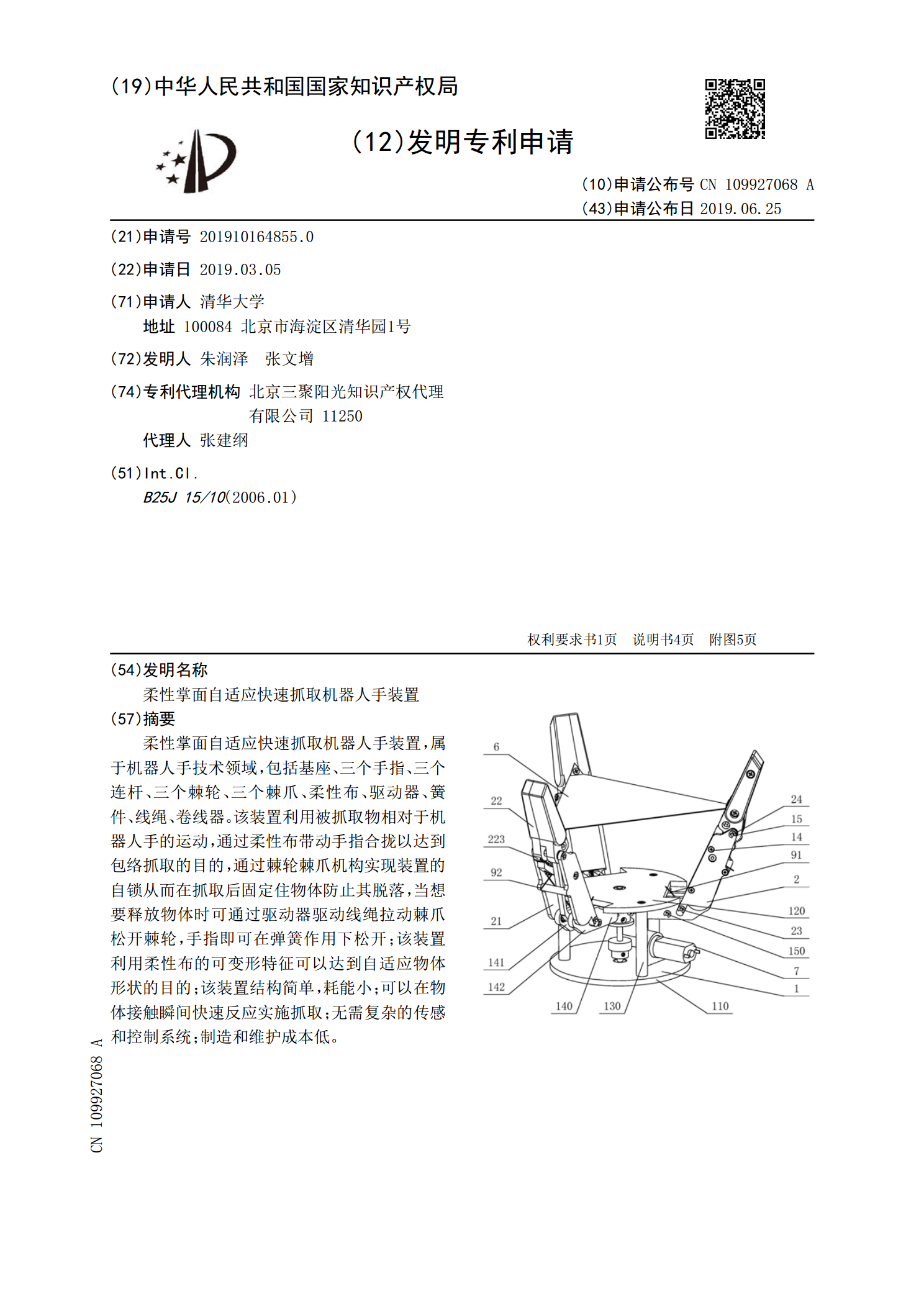
柔性掌面自适应快速抓取机器人手装置,属于机器人手技术领域,包括基座、三个手指、三个连杆、三个棘轮、三个棘爪、柔性布、驱动器、簧件、线绳、卷线器。该装置利用被抓取物相对于机器人手的运动,通过柔性布带动手指合拢以达到包络抓取的目的,通过棘轮棘爪机构实现装置的自锁从而在抓取后固定住物体防止其脱落,当想要释放物体时可通过驱动器驱动线绳拉动棘爪松开棘轮,手指即可在弹簧作用下松开;该装置利用柔性布的可变形特征可以达到自适应物体形状的目的;该装置结构简单,耗能小;可以在物体接触瞬间快速反应实施抓取;无需复杂的传感和控制
聚拢式快速抓取滑杆自适应机器人手装置.pdf
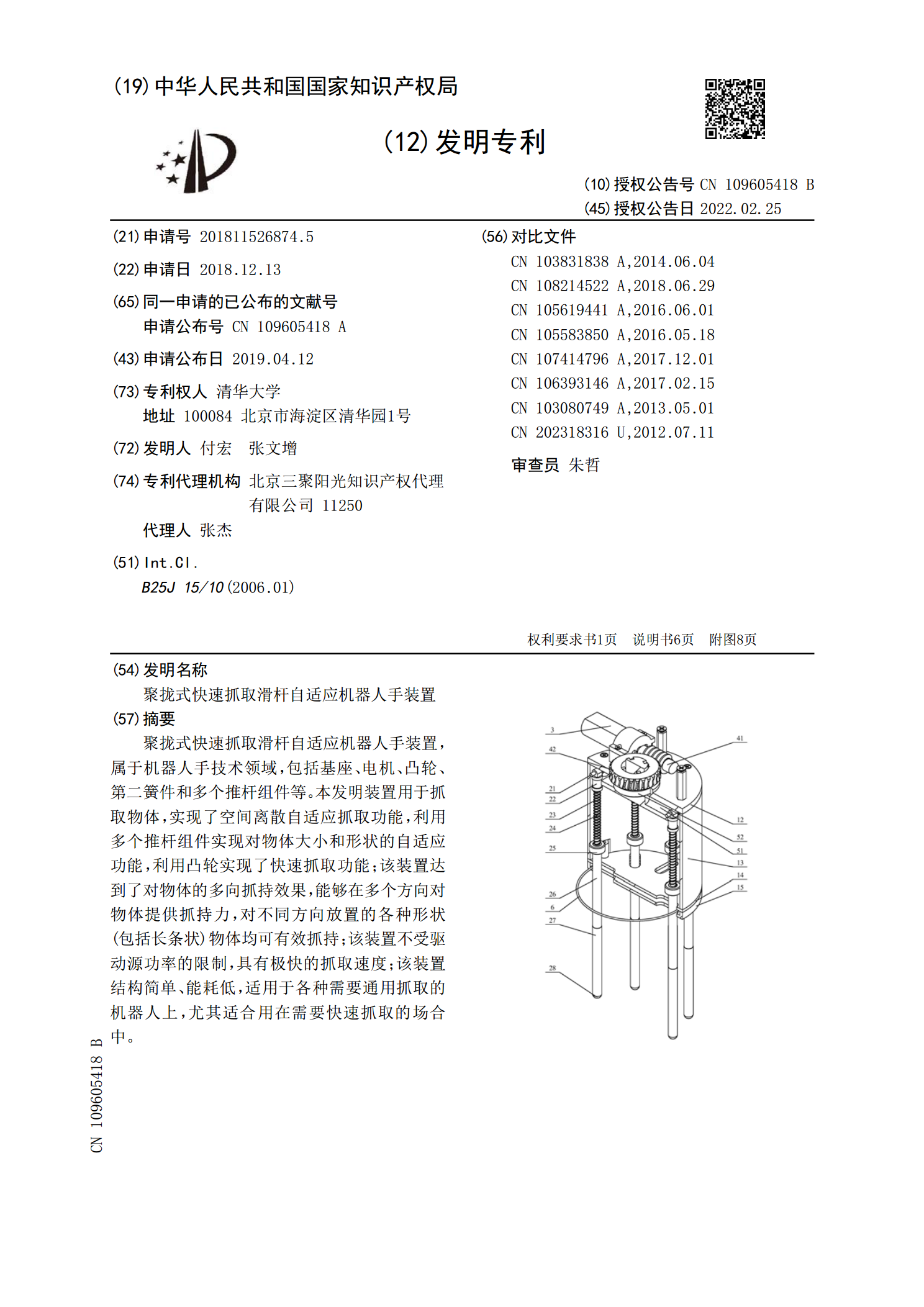
聚拢式快速抓取滑杆自适应机器人手装置,属于机器人手技术领域,包括基座、电机、凸轮、第二簧件和多个推杆组件等。本发明装置用于抓取物体,实现了空间离散自适应抓取功能,利用多个推杆组件实现对物体大小和形状的自适应功能,利用凸轮实现了快速抓取功能;该装置达到了对物体的多向抓持效果,能够在多个方向对物体提供抓持力,对不同方向放置的各种形状(包括长条状)物体均可有效抓持;该装置不受驱动源功率的限制,具有极快的抓取速度;该装置结构简单、能耗低,适用于各种需要通用抓取的机器人上,尤其适合用在需要快速抓取的场合中。

快速包络抓取平夹自适应机器人手指装置.pdf
快速包络抓取平夹自适应机器人手指装置,属于机器人手技术领域,包括基座、驱动器、两个指段、两个关节轴、多个齿轮、中间传动机构、柔性传动件、滑块、限位盘、簧件和限位盘等。该装置实现了双关节机器人手指平行夹持及自适应抓取的功能。根据目标物体形状和位置的不同,该装置自动采用平夹或自适应包络模式抓取。该装置既能末端平行夹持物体;也能用两个指段自适应包络不同形状、大小的物体,抓取稳定。该装置在自适应抓取时第二指段响应快速,抓取效率高;抓取范围大;采用欠驱动的方式,利用一个驱动器驱动两个关节,无需复杂的传感和控制系统;
可控力的快速抓取杆簇自适应机器人手装置.pdf
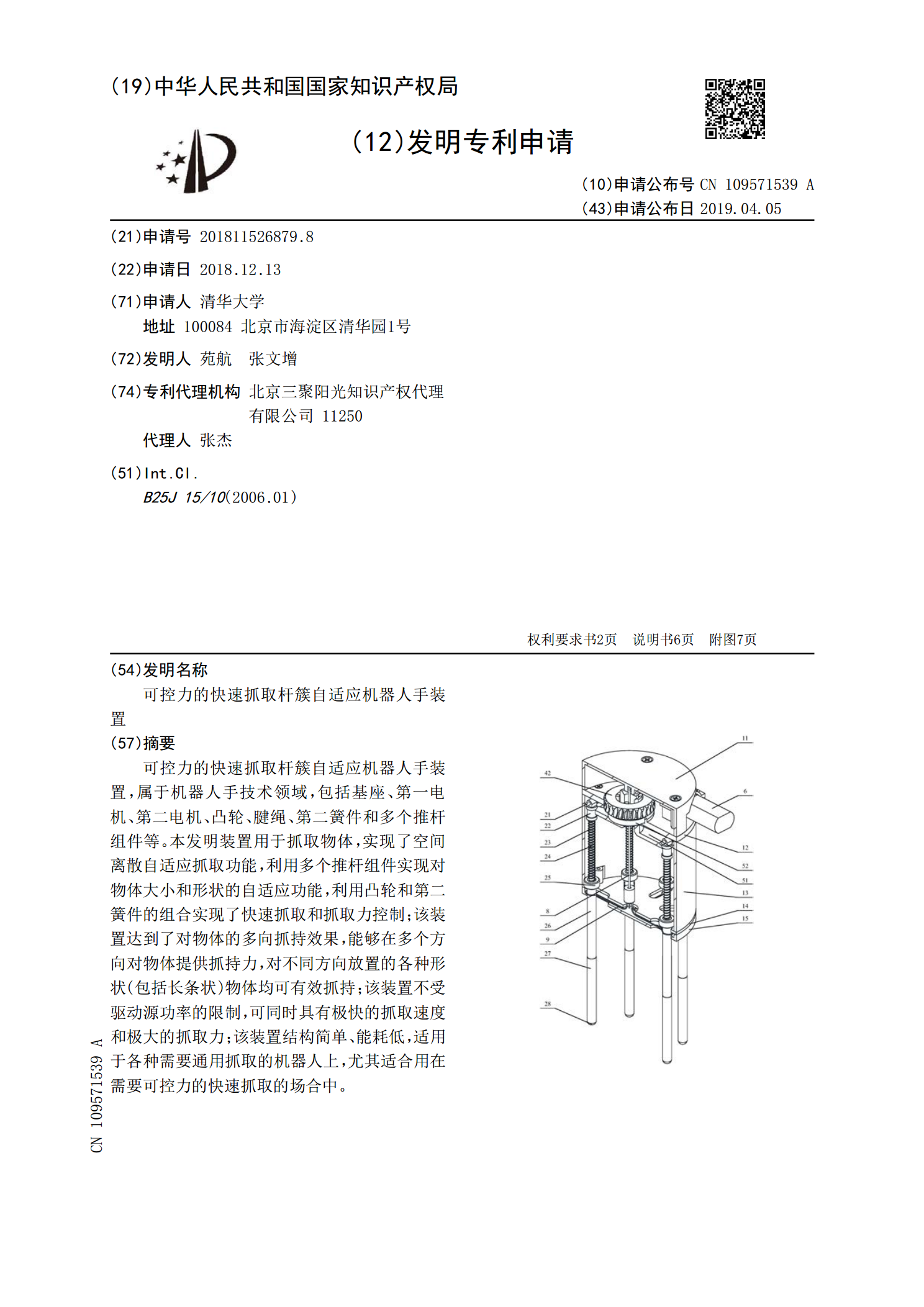
可控力的快速抓取杆簇自适应机器人手装置,属于机器人手技术领域,包括基座、第一电机、第二电机、凸轮、腱绳、第二簧件和多个推杆组件等。本发明装置用于抓取物体,实现了空间离散自适应抓取功能,利用多个推杆组件实现对物体大小和形状的自适应功能,利用凸轮和第二簧件的组合实现了快速抓取和抓取力控制;该装置达到了对物体的多向抓持效果,能够在多个方向对物体提供抓持力,对不同方向放置的各种形状(包括长条状)物体均可有效抓持;该装置不受驱动源功率的限制,可同时具有极快的抓取速度和极大的抓取力;该装置结构简单、能耗低,适用于各种

快速抓取欠驱动机器人手装置.pdf
快速抓取欠驱动机器人手装置,属于机器人手技术领域,主要包括手掌、至少两个手指、主轴、电机、减速器、具有不完全齿的第一齿轮、第二齿轮、手指张开到位检测的传感器、物体到位检测的传感器和控制模块等。手指为腱绳-扭簧式多关节手指。本发明装置具有自动快速抓取物体的功能,抓取过程包括手指储能张开、手指张开到位检测、物体到位检测和瞬时释放抓取四个过程;该装置能实现快速抓取;检测到物体后可自动抓取;具有自适应抓取不同形状和尺寸物体;结构紧凑,手掌体积小,抓取空间大;传动平稳精确,传动效率高;仅采用一个电机驱动多个手指的多