
单自由度轮/履形态可重构行走机构.pdf

一吃****昕靓


1/10

2/10
3/10
4/10

5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

单自由度轮/履形态可重构行走机构.pdf
本发明涉及一种单自由度轮/履形态可重构行走机构,其包括轮体架、驱动装置、行走装置和形态转换装置,轮体架包括两个对称设置的辐板组件、上连接件和下连接件,两个辐板组件的对称面为横向对称面,辐板组件包括外轮辐板和两个从动齿轮,两个从动齿轮的对称面为纵向对称面,驱动装置包括驱动主轴和两个驱动齿轮,行走装置包括两个结构相同的内齿轮,两个从动齿轮分别与两个内齿轮啮合传动,形态转换装置包括驱动液压缸、两个对称布置的收展机构和中心连接件,通过两个收展机构的收展变形可以实现行走机构轮/履运动形式的切换。本发明为过约束机构,

一种高刚度可重构轮/履变形行走机构.pdf
本发明提供一种高刚度可重构轮/履变形行走机构,其包括机体、驱动组件、车轮组件和重构组件,机体包括两个对称布置的外轮单元以及连接件,两个外轮单元的对称面为横向中面;驱动组件包括主轴和两个关于横向中面对称布置的驱动齿轮,对称安装在主轴上组成驱动组件;车轮组件包括两个关于横向中面对称布置的内齿轮,内齿轮与机体通过转动副连接,两个驱动齿轮分别和两个内齿轮相啮合,从而实现传动;重构组件包括两个变形机构,通过两个变形机构的收展变形可以实现行走机构轮/履运动形式的切换;本发明为过约束机构,刚度高,稳定性高,可应用于灾后
一种轮履形态可重构移动救援机器人.pdf
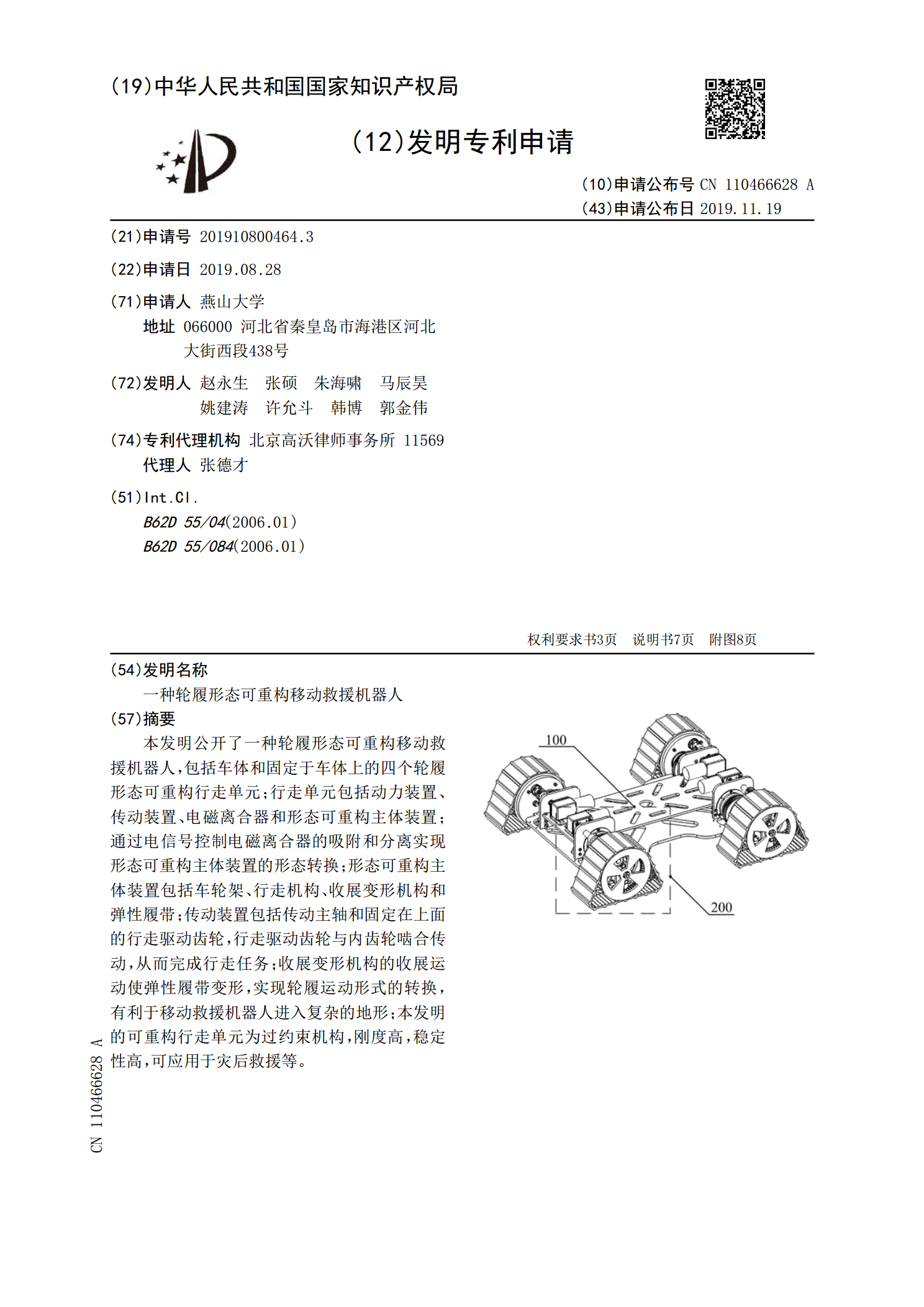
本发明公开了一种轮履形态可重构移动救援机器人,包括车体和固定于车体上的四个轮履形态可重构行走单元;行走单元包括动力装置、传动装置、电磁离合器和形态可重构主体装置;通过电信号控制电磁离合器的吸附和分离实现形态可重构主体装置的形态转换;形态可重构主体装置包括车轮架、行走机构、收展变形机构和弹性履带;传动装置包括传动主轴和固定在上面的行走驱动齿轮,行走驱动齿轮与内齿轮啮合传动,从而完成行走任务;收展变形机构的收展运动使弹性履带变形,实现轮履运动形式的转换,有利于移动救援机器人进入复杂的地形;本发明的可重构行走单

一种轮履式可重构变形轮.pdf
本发明公开一种轮履式可重构变形轮,包括固定装置、轮履形态变形装置和履带行进装置;固定装置包括变形轮支撑架和U型支撑架;变形轮支撑架为变形轮的受力主体;U型支撑架安装在变形轮支撑架上并位于变形轮内部;轮履形态变形装置包括变形传动机构和变形连杆结构,变形传动机构用于驱动变形连杆结构可相对于变形轮支撑架伸出或缩回;履带行走装置的传动部分安装在变形轮支撑架上,弹性履带包覆于变形轮的外部轮廓并与变形连杆结构相接触。该轮履式可重构变形轮,具有自由切换两种形态能力和高承载能力,并且实施方式简单,可靠性高,在较多领域应用

形态可重构移动机器人行走机构设计与分析.docx
形态可重构移动机器人行走机构设计与分析形态可重构移动机器人行走机构设计与分析摘要:形态可重构移动机器人是一种具有多种形态和功能的机器人系统,能够通过改变自身形态适应不同的工作环境和任务需求。本文主要介绍形态可重构移动机器人的行走机构设计与分析。首先,对形态可重构移动机器人的定义和特点进行了介绍。然后,根据机器人的形态调整需求,对行走机构的设计进行了分析,并给出了几种常见的设计方案。最后,通过实验验证了行走机构的性能和效果,进一步验证了设计方案的可行性和有效性。关键词:形态可重构移动机器人;行走机构;设计;