
一种轮毂电机车辆失效控制方法及整车控制器.pdf

是你****岺呀


1/10

2/10

3/10

4/10
5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种轮毂电机车辆失效控制方法及整车控制器.pdf
本发明涉及轮毂电机车辆失效控制技术领域,公开了一种轮毂电机车辆失效控制方法,包括以下步骤:根据轮毂电机的失效状态选择驱动模式;进入两驱模式时进行纵向驱动力的分配:根据二阶滑模控制方法建立横摆力矩控制器,计算期望横摆力矩;结合驾驶员意图参数和车辆姿态参数设定分配权重系数;采用根据所述期望横摆力矩和分配权重系数进行纵向驱动力的分配;结合所述驱动模式以及纵向驱动力的分配结果对车辆进行失效控制。本发明提供的轮毂电机车辆失效控制方法能够在保证汽车安全行驶的前提下发挥剩余动力性,保证汽车在电机失效状态下安全行驶。

整车控制器、车辆及整车控制器的控制方法.pdf
本发明公开了一种整车控制器、车辆及整车控制器的控制方法,该整车控制器包括:从芯片,所述从芯片具有CAN通道,用于将报文通过所述CAN通道发送给目标节点,并通过所述CAN通道接收来自所述目标节点反馈的响应结果;主芯片,所述主芯片与所述从芯片相连,用于向所述从芯片发送所述报文,并接收来自所述从芯片发送的所述目标节点反馈的响应结果。本发明的整车控制器降低了主芯片上CAN通道的报文负载率,提高了报文的响应速度,减少了报文丢失情况的出现。
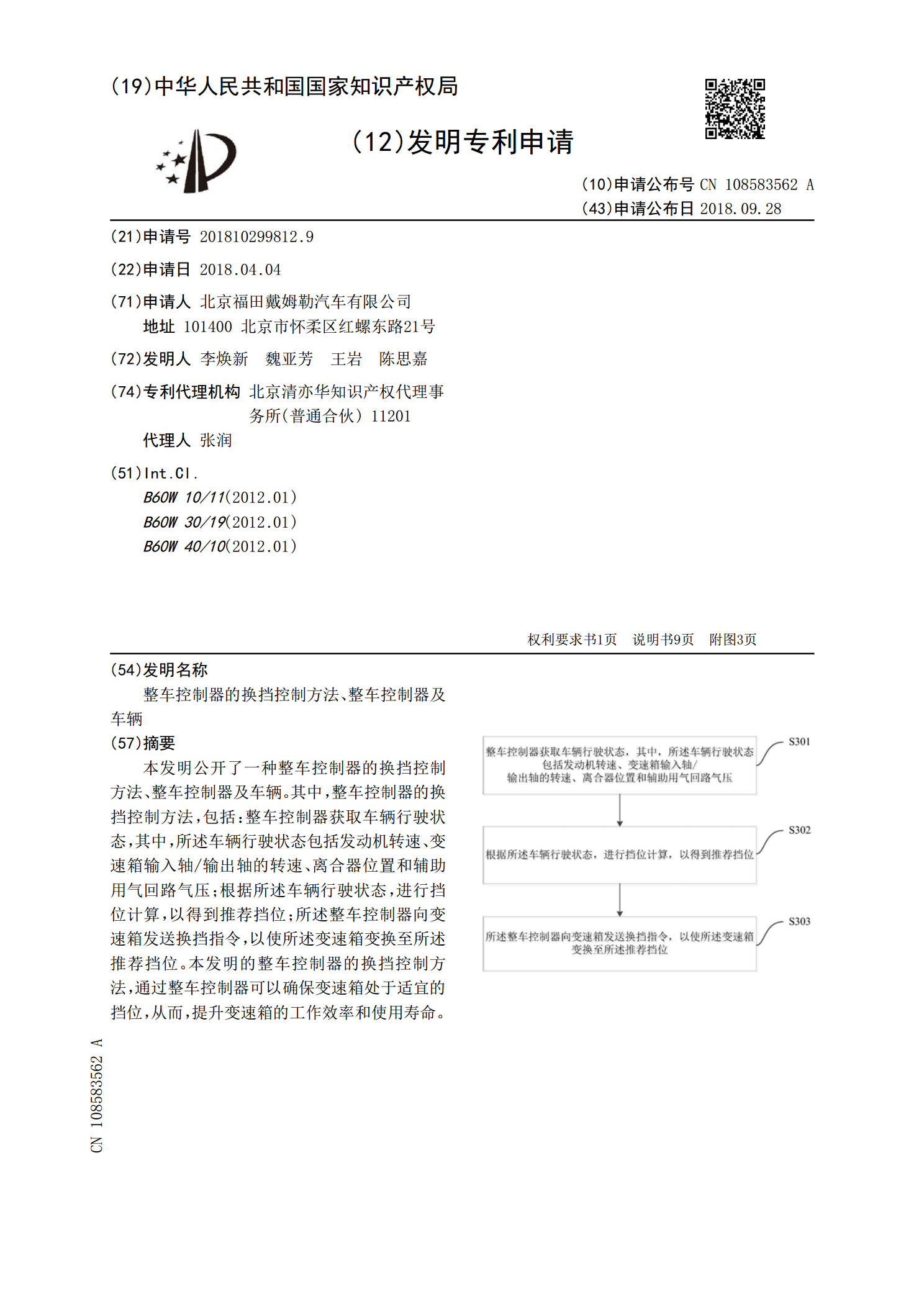
整车控制器的换挡控制方法、整车控制器及车辆.pdf
本发明公开了一种整车控制器的换挡控制方法、整车控制器及车辆。其中,整车控制器的换挡控制方法,包括:整车控制器获取车辆行驶状态,其中,所述车辆行驶状态包括发动机转速、变速箱输入轴/输出轴的转速、离合器位置和辅助用气回路气压;根据所述车辆行驶状态,进行挡位计算,以得到推荐挡位;所述整车控制器向变速箱发送换挡指令,以使所述变速箱变换至所述推荐挡位。本发明的整车控制器的换挡控制方法,通过整车控制器可以确保变速箱处于适宜的挡位,从而,提升变速箱的工作效率和使用寿命。
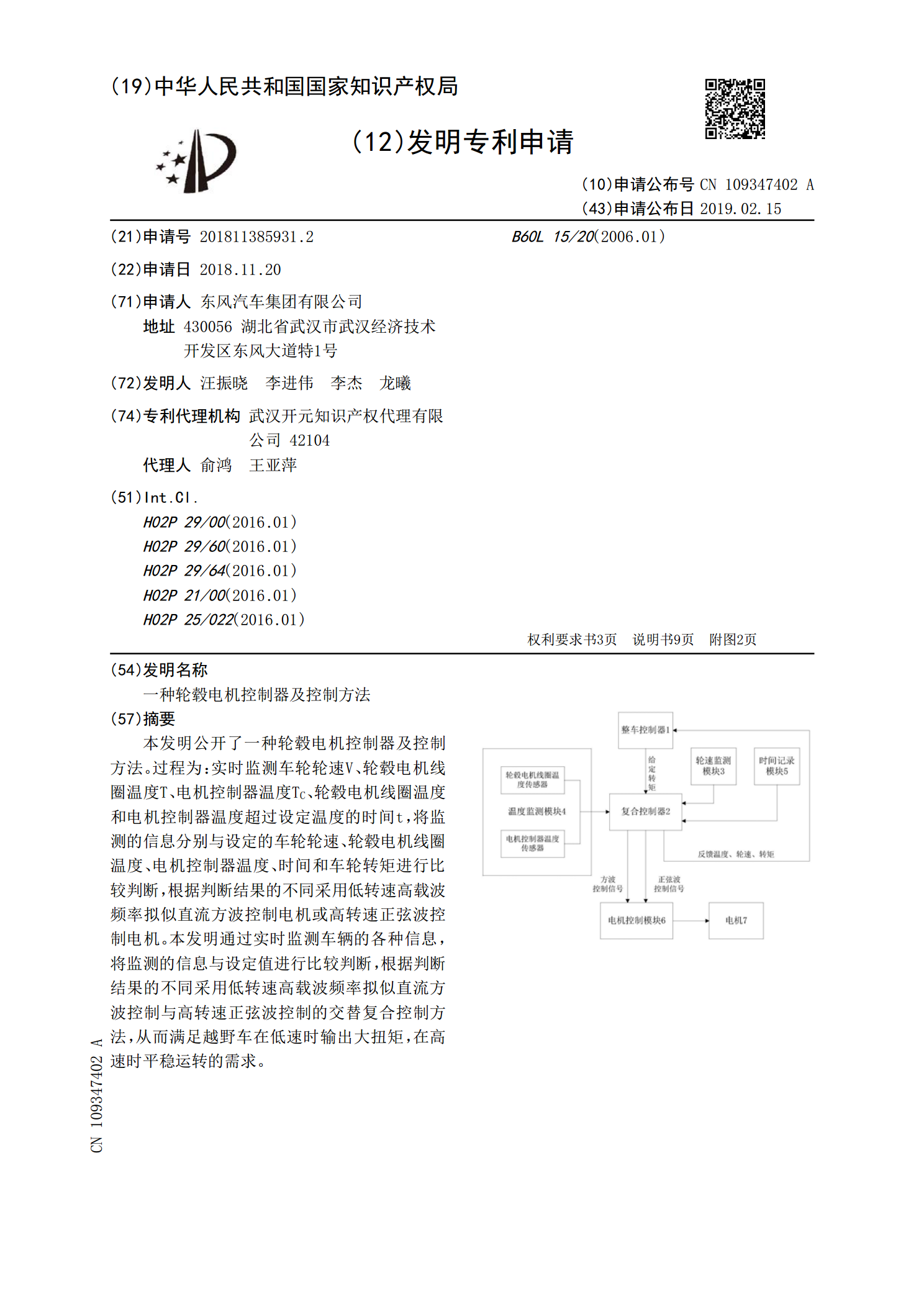
一种轮毂电机控制器及控制方法.pdf
本发明公开了一种轮毂电机控制器及控制方法。过程为:实时监测车轮轮速V、轮毂电机线圈温度T、电机控制器温度T
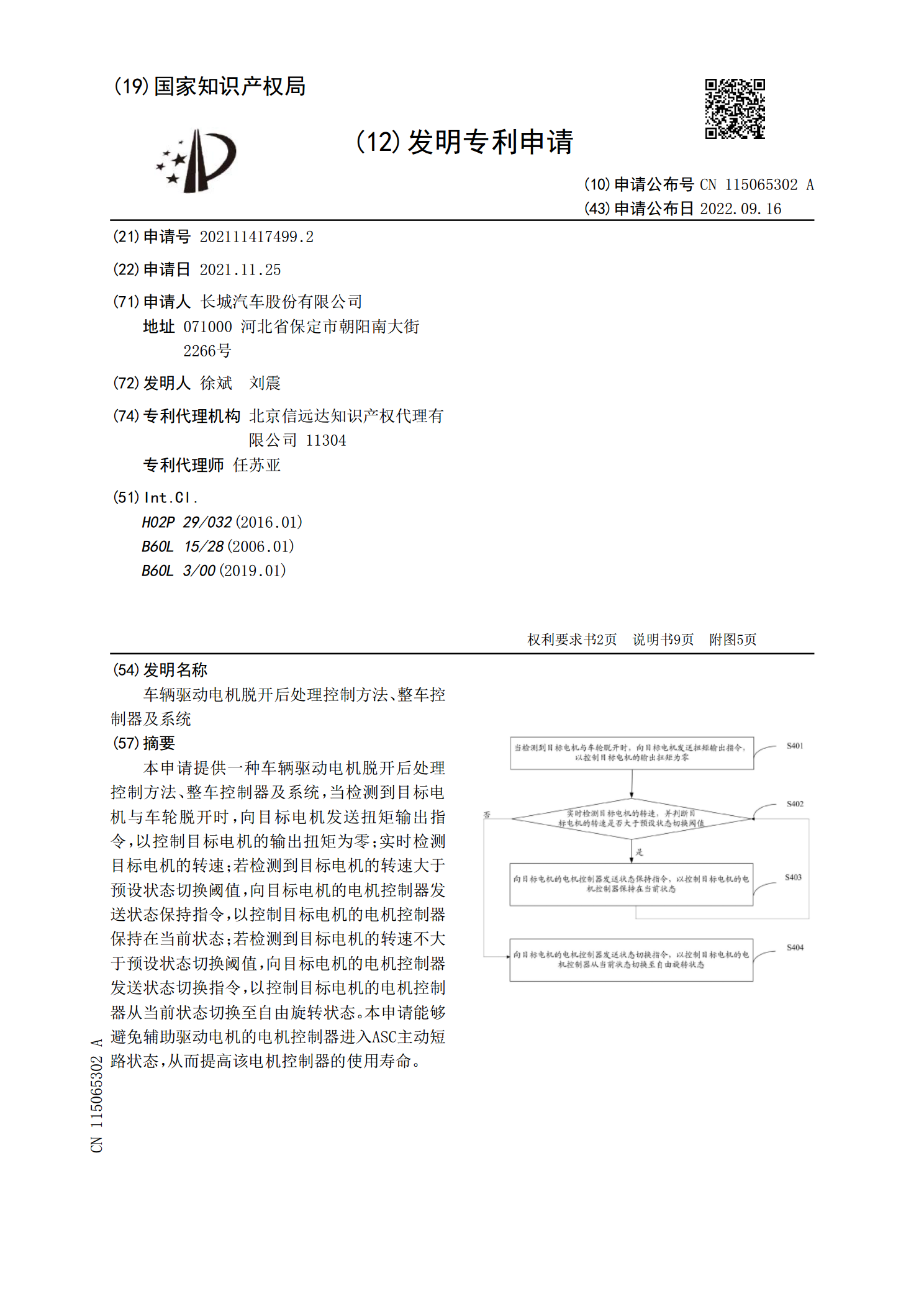
车辆驱动电机脱开后处理控制方法、整车控制器及系统.pdf
本申请提供一种车辆驱动电机脱开后处理控制方法、整车控制器及系统,当检测到目标电机与车轮脱开时,向目标电机发送扭矩输出指令,以控制目标电机的输出扭矩为零;实时检测目标电机的转速;若检测到目标电机的转速大于预设状态切换阈值,向目标电机的电机控制器发送状态保持指令,以控制目标电机的电机控制器保持在当前状态;若检测到目标电机的转速不大于预设状态切换阈值,向目标电机的电机控制器发送状态切换指令,以控制目标电机的电机控制器从当前状态切换至自由旋转状态。本申请能够避免辅助驱动电机的电机控制器进入ASC主动短路状态,从而