
一种多连杆伺服压力机运动控制方法及系统.pdf

元容****少女

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种多连杆伺服压力机运动控制方法及系统.pdf
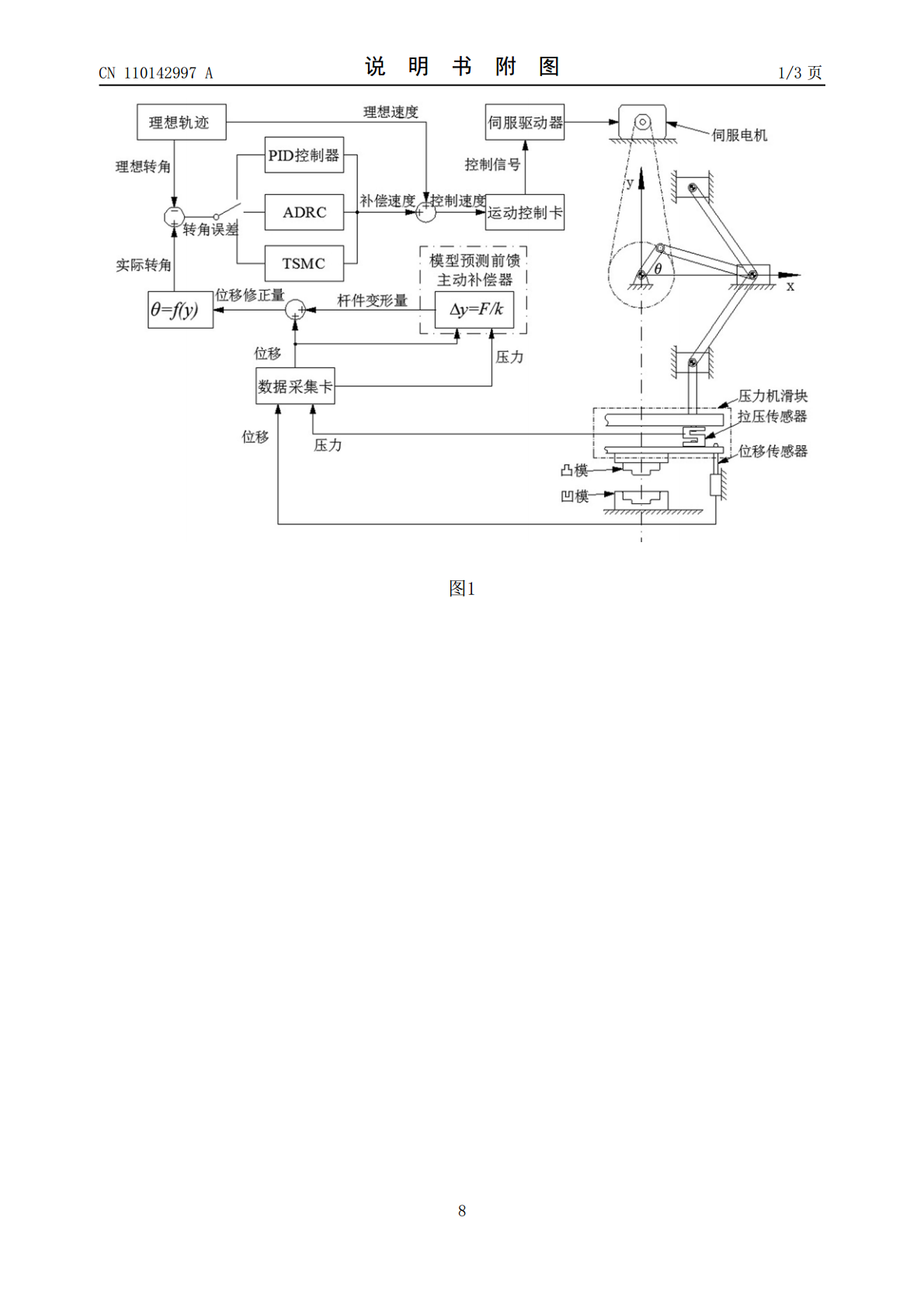
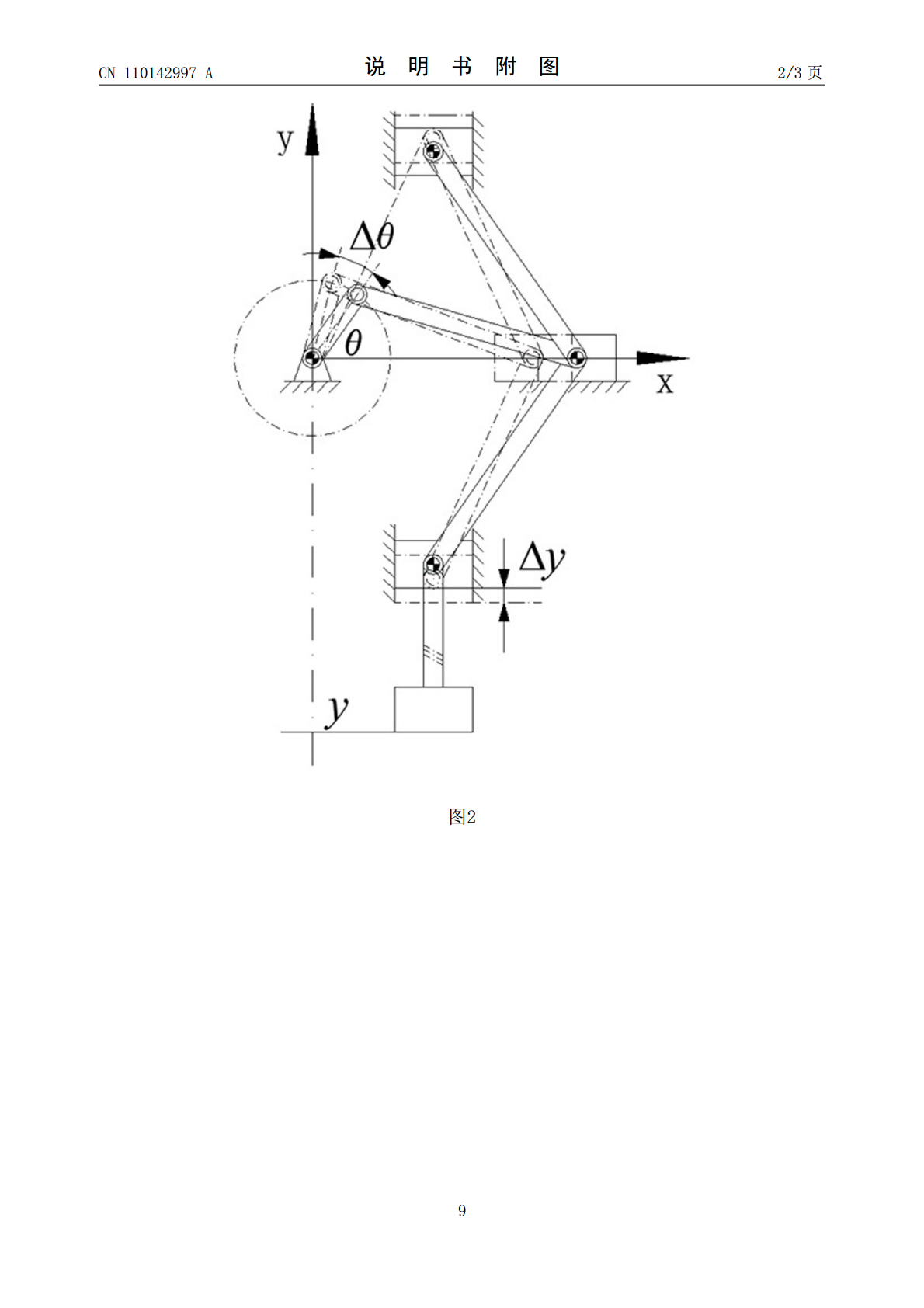
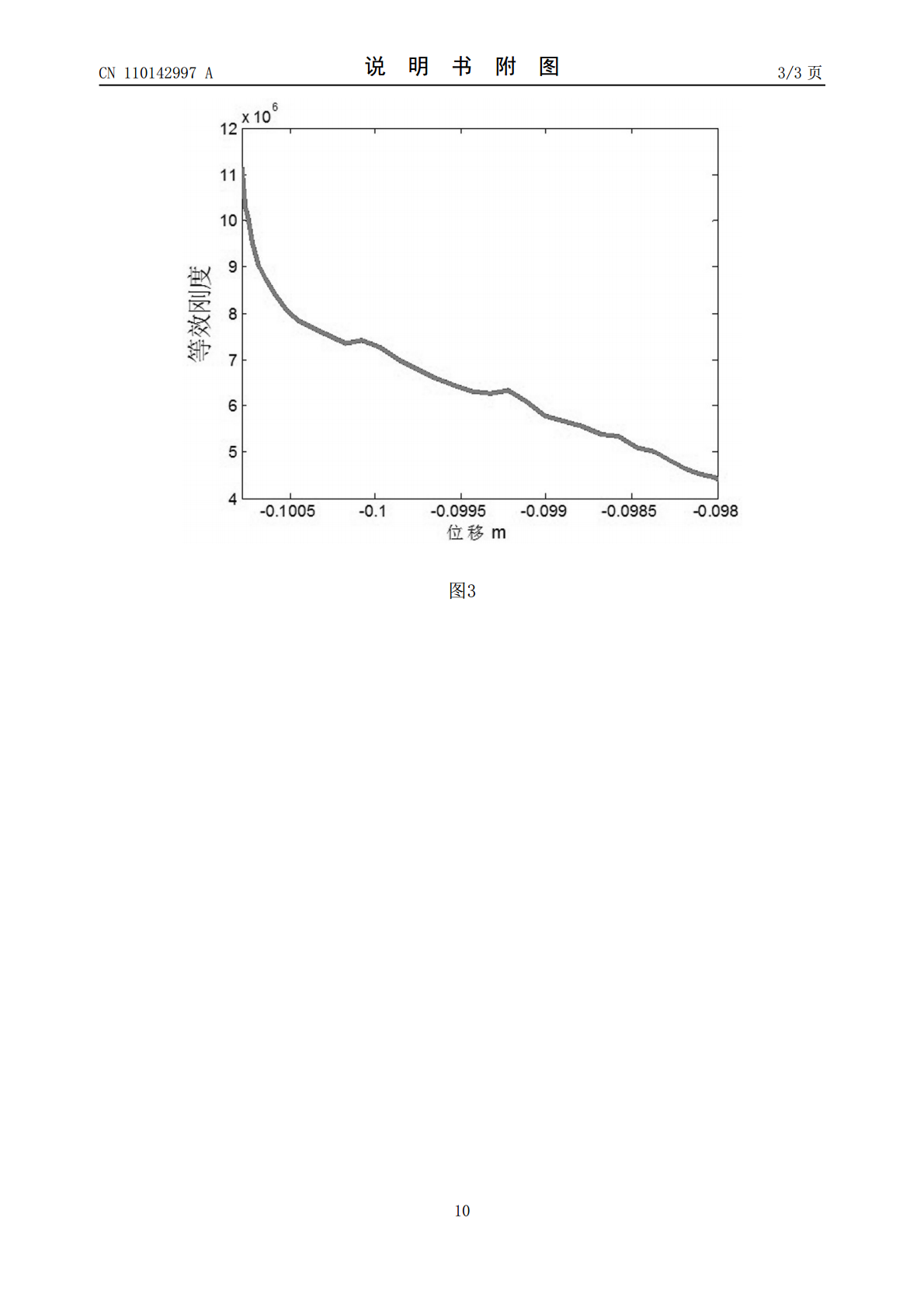
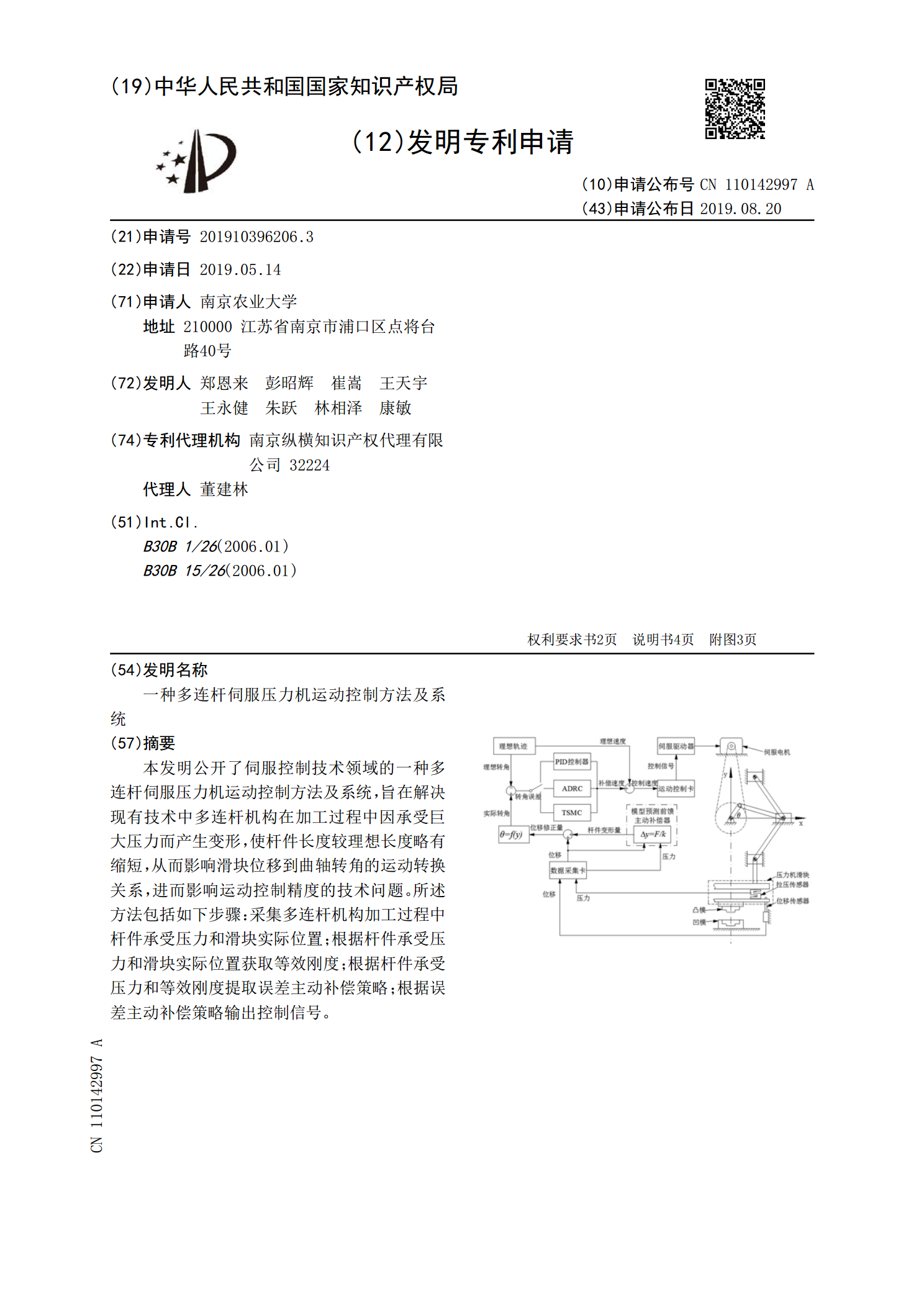
本发明公开了伺服控制技术领域的一种多连杆伺服压力机运动控制方法及系统,旨在解决现有技术中多连杆机构在加工过程中因承受巨大压力而产生变形,使杆件长度较理想长度略有缩短,从而影响滑块位移到曲轴转角的运动转换关系,进而影响运动控制精度的技术问题。所述方法包括如下步骤:采集多连杆机构加工过程中杆件承受压力和滑块实际位置;根据杆件承受压力和滑块实际位置获取等效刚度;根据杆件承受压力和等效刚度提取误差主动补偿策略;根据误差主动补偿策略输出控制信号。
一种双伺服驱动四点式多连杆压力机.pdf
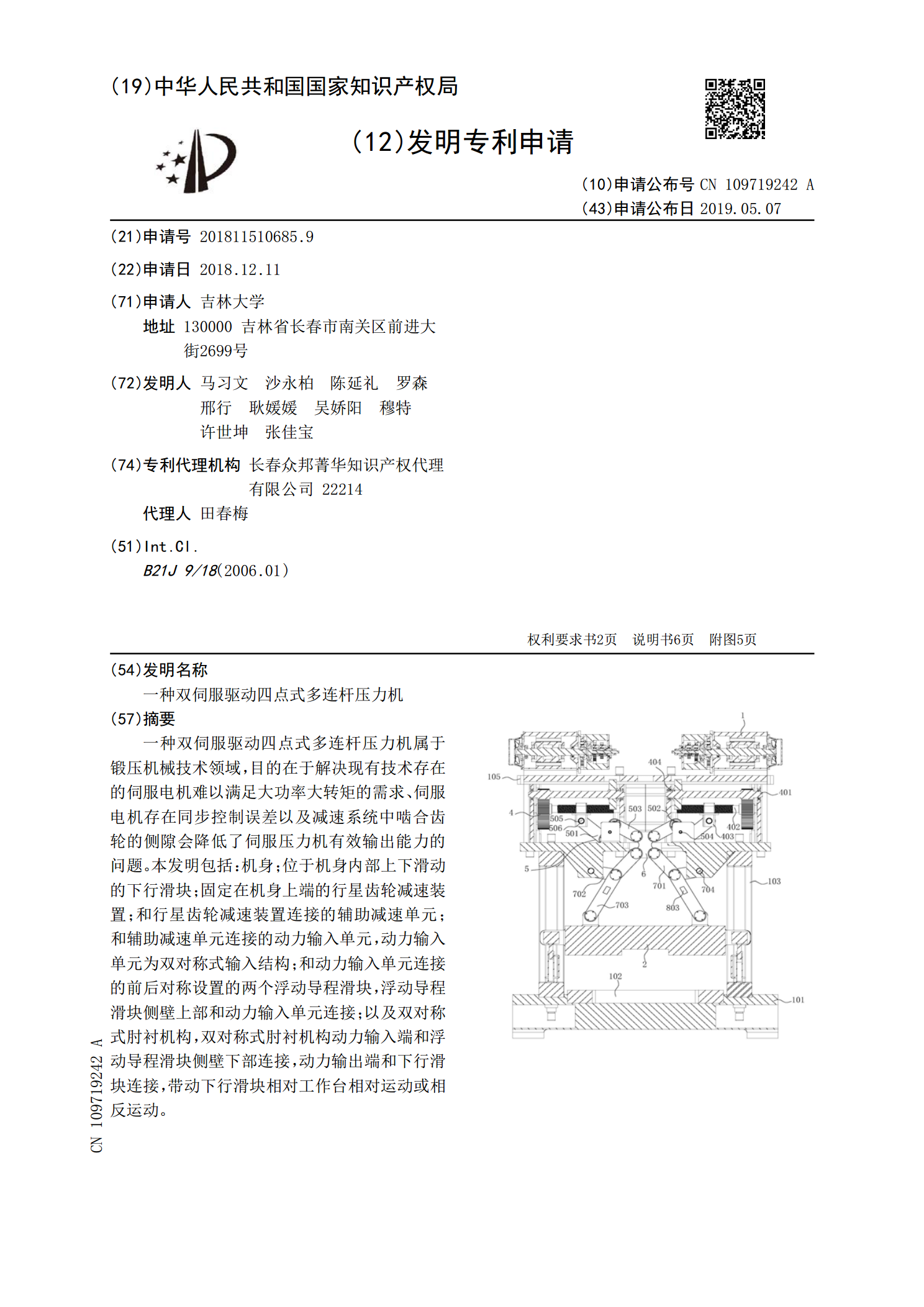
一种双伺服驱动四点式多连杆压力机属于锻压机械技术领域,目的在于解决现有技术存在的伺服电机难以满足大功率大转矩的需求、伺服电机存在同步控制误差以及减速系统中啮合齿轮的侧隙会降低了伺服压力机有效输出能力的问题。本发明包括:机身;位于机身内部上下滑动的下行滑块;固定在机身上端的行星齿轮减速装置;和行星齿轮减速装置连接的辅助减速单元;和辅助减速单元连接的动力输入单元,动力输入单元为双对称式输入结构;和动力输入单元连接的前后对称设置的两个浮动导程滑块,浮动导程滑块侧壁上部和动力输入单元连接;以及双对称式肘衬机构,双

六电机并联驱动机械多连杆伺服压力机.pdf
一种锻压机械技术领域的六电机并联驱动机械多连杆伺服压力机,包括:机架、六组相同的偏心轮驱动装置、六自由度并联机构、多连杆机构和冲压滑块,六组偏心轮驱动装置与六自由度并联机构连接,多连杆机构分别与六自由度并联机构和冲压滑块连接,机架套接于六组相同的偏心轮驱动装置、六自由度并联机构、多连杆机构和冲压滑块的外侧。本发明利用六自由度并联机构的有六个输入而无运动干涉特性,以伺服电机驱动偏心轮为输入,采用六自由度并联机构协调并合成六个伺服电机的运动和扭矩,输出到动平台,再由动平台驱动多连杆机构,推动冲压滑块完成单自由

一种多连杆压力机.pdf
本发明公开了一种多连杆压力机,包括开式机身、工作台板和滑块,滑块通过滑轨与开式机身滑动连接;滑块通过设置于其顶部的连杆与一曲轴连接,曲轴的尾端套设有主连杆,主连杆通过第一销轴与付连杆连接,付连杆通过第二销轴与套设在偏心套外部的第一齿轮连接,第一齿轮底部啮合有第二齿轮,第二齿轮外部套设有与其刚性连接的第三齿轮,第三齿轮底部啮合有第四齿轮,第四齿轮的齿轮轴首端设置有制动器,第四齿轮的齿轮轴尾端与伺服电机连接,由伺服电机驱动转动;本发明提供的多连杆压力机,通过多连杆机构驱动曲轴运动,实现滑块运动控制的伺服压力机
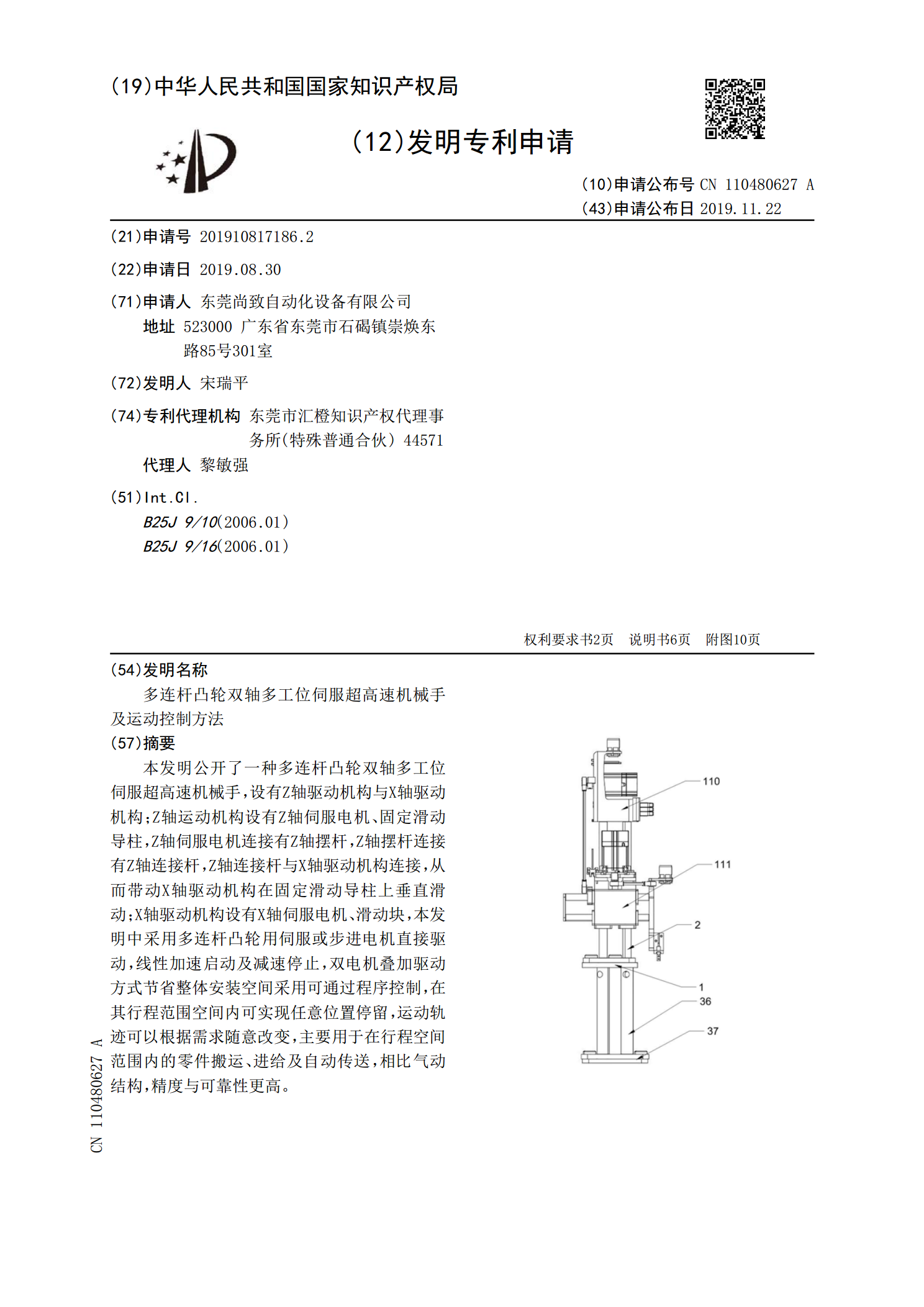
多连杆凸轮双轴多工位伺服超高速机械手及运动控制方法.pdf
本发明公开了一种多连杆凸轮双轴多工位伺服超高速机械手,设有Z轴驱动机构与X轴驱动机构;Z轴运动机构设有Z轴伺服电机、固定滑动导柱,Z轴伺服电机连接有Z轴摆杆,Z轴摆杆连接有Z轴连接杆,Z轴连接杆与X轴驱动机构连接,从而带动X轴驱动机构在固定滑动导柱上垂直滑动;X轴驱动机构设有X轴伺服电机、滑动块,本发明中采用多连杆凸轮用伺服或步进电机直接驱动,线性加速启动及减速停止,双电机叠加驱动方式节省整体安装空间采用可通过程序控制,在其行程范围空间内可实现任意位置停留,运动轨迹可以根据需求随意改变,主要用于在行程空间