
一种航天器高精度自动转运装置及其定位方法.pdf

梦影****主a


1/10

2/10

3/10
4/10
5/10
6/10

7/10

8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种航天器高精度自动转运装置及其定位方法.pdf
本发明涉及一种航天器高精度自动转运装置及其定位方法,涉及移动机器人自主导航与高精度定位技术领域。本发明采用麦克纳姆轮的全向移动平台配置升降装置进行航天器的转运。本发明所述的装置底面安装视觉识别模块,识别地面粘贴的码带进行自主导航并在到达指定工位后进行初始定位,侧面安装3个激光位移传感器测量与工位架之间的距离,解算平台的姿态控制车体自主移动实现指定工位的高精度定位,在不同定位点举升和落下航天器,实现航天器与工位架的高精度对接。

一种自动高精度定位装置.pdf
一种高精度定位装置,由固定座、传动齿轮、传动齿条、连接螺栓、固定板、编码器、联轴器所组成,固定座由钢板铣加工而成,中间有放置齿轮的长方形槽孔,固定座固定在下机体上,固定座一侧与固定板由连接螺栓连接,连接板上装有编码器,编码器经联轴器与齿轮连接,传动齿条固定在上台板一侧,齿轮与齿条连接配合在一起,工作时上台板上升,齿条也随着上升,牵动齿轮、编码器旋转,编码器释放信号,PLC控制模切裁断机械做精确模切。自动高精度定位装置用于冲裁机械产品的上下台板的冲裁距离精确定位,尤其适合高精度材料的精确冲裁机构的精确定位,
一种砂型自动定位装置及其定位方法.pdf
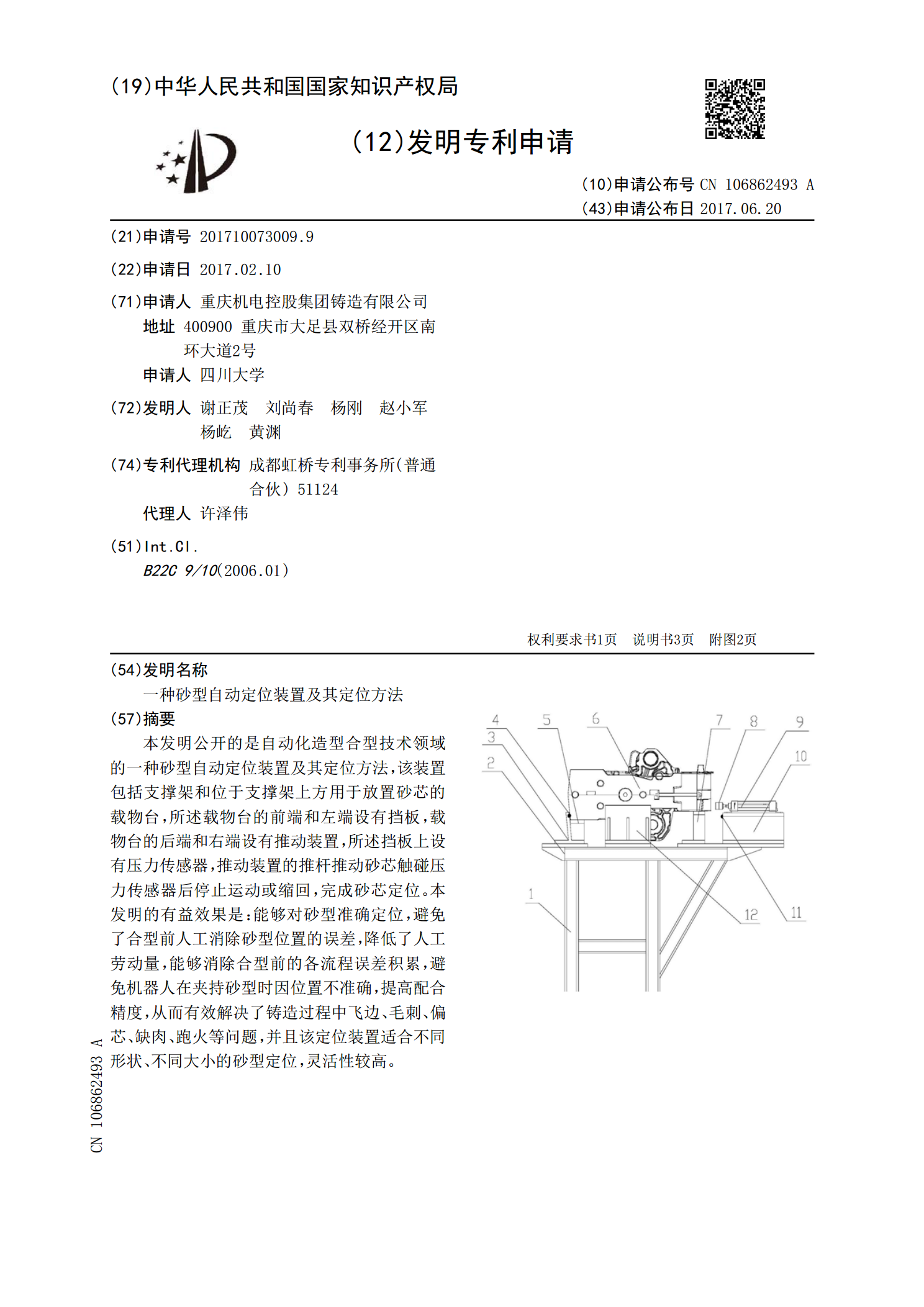
本发明公开的是自动化造型合型技术领域的一种砂型自动定位装置及其定位方法,该装置包括支撑架和位于支撑架上方用于放置砂芯的载物台,所述载物台的前端和左端设有挡板,载物台的后端和右端设有推动装置,所述挡板上设有压力传感器,推动装置的推杆推动砂芯触碰压力传感器后停止运动或缩回,完成砂芯定位。本发明的有益效果是:能够对砂型准确定位,避免了合型前人工消除砂型位置的误差,降低了人工劳动量,能够消除合型前的各流程误差积累,避免机器人在夹持砂型时因位置不准确,提高配合精度,从而有效解决了铸造过程中飞边、毛刺、偏芯、缺肉、跑
一种自动合模的定位装置及其定位方法.pdf
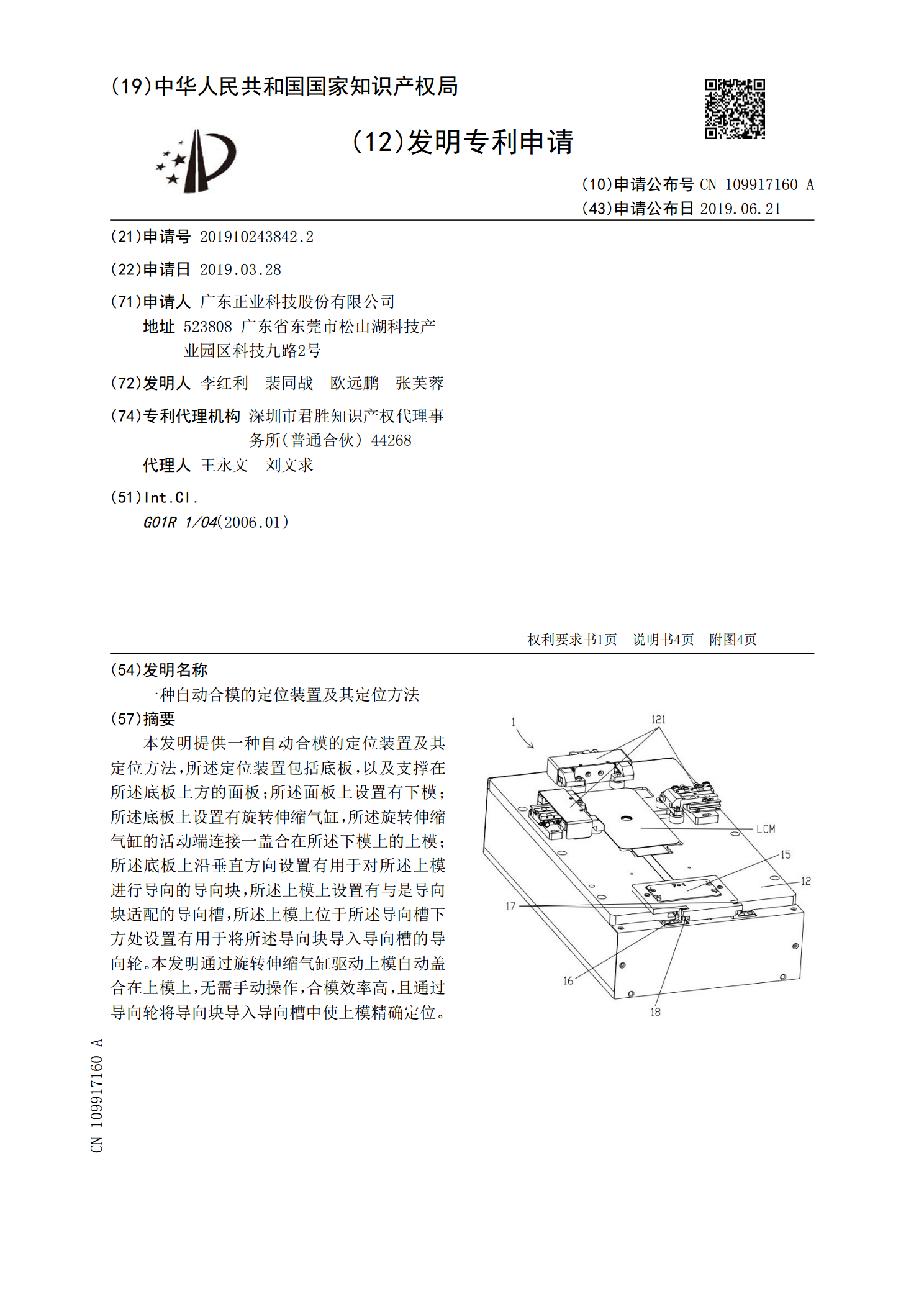
本发明提供一种自动合模的定位装置及其定位方法,所述定位装置包括底板,以及支撑在所述底板上方的面板;所述面板上设置有下模;所述底板上设置有旋转伸缩气缸,所述旋转伸缩气缸的活动端连接一盖合在所述下模上的上模;所述底板上沿垂直方向设置有用于对所述上模进行导向的导向块,所述上模上设置有与是导向块适配的导向槽,所述上模上位于所述导向槽下方处设置有用于将所述导向块导入导向槽的导向轮。本发明通过旋转伸缩气缸驱动上模自动盖合在上模上,无需手动操作,合模效率高,且通过导向轮将导向块导入导向槽中使上模精确定位。
一种倾斜锚杆群高精度定位装置及其定位方法.pdf
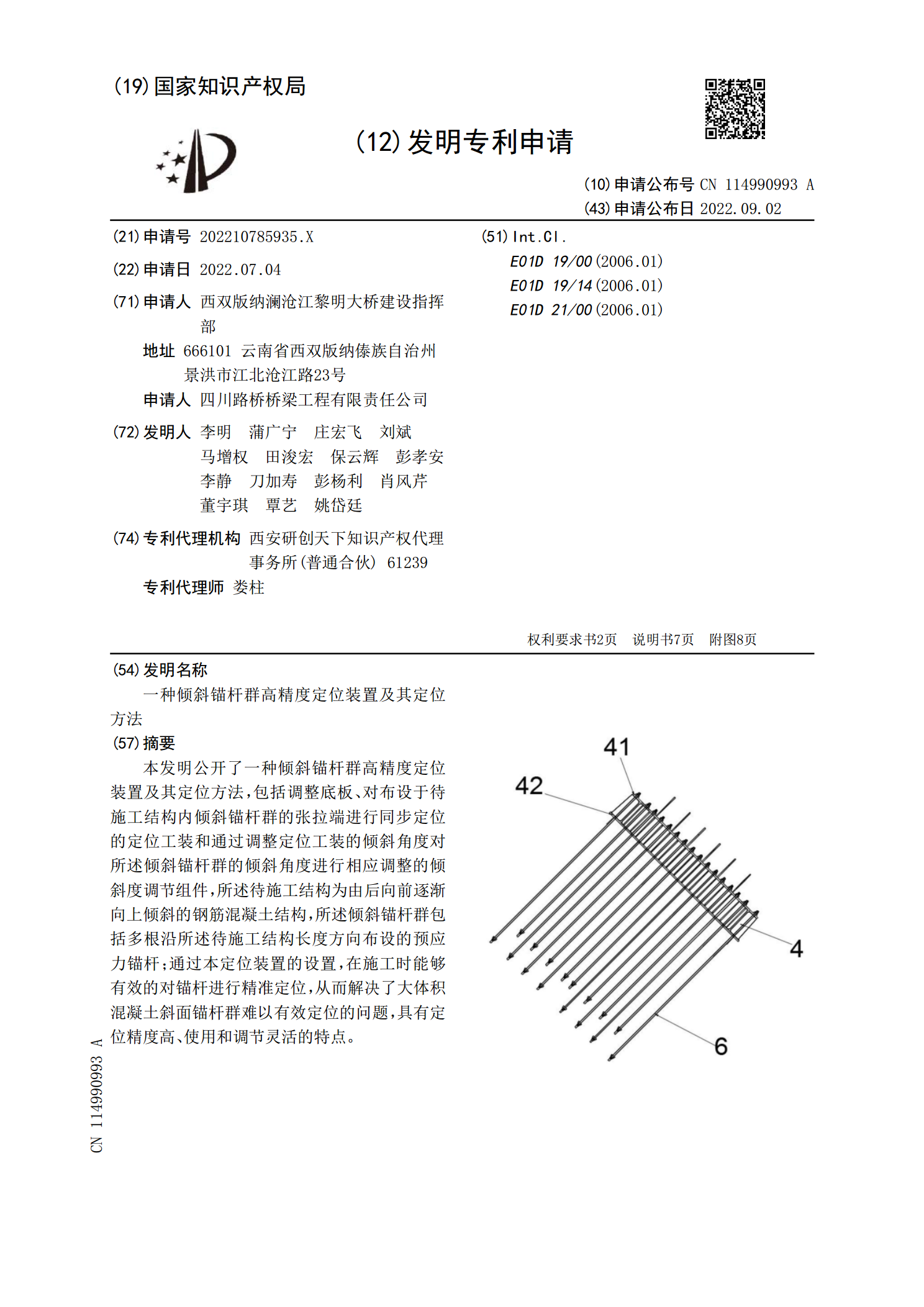
本发明公开了一种倾斜锚杆群高精度定位装置及其定位方法,包括调整底板、对布设于待施工结构内倾斜锚杆群的张拉端进行同步定位的定位工装和通过调整定位工装的倾斜角度对所述倾斜锚杆群的倾斜角度进行相应调整的倾斜度调节组件,所述待施工结构为由后向前逐渐向上倾斜的钢筋混凝土结构,所述倾斜锚杆群包括多根沿所述待施工结构长度方向布设的预应力锚杆;通过本定位装置的设置,在施工时能够有效的对锚杆进行精准定位,从而解决了大体积混凝土斜面锚杆群难以有效定位的问题,具有定位精度高、使用和调节灵活的特点。