
一种跨越障碍机器人及其越障方法.pdf

一条****发啊

1/10

2/10

3/10
4/10

5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种跨越障碍机器人及其越障方法.pdf
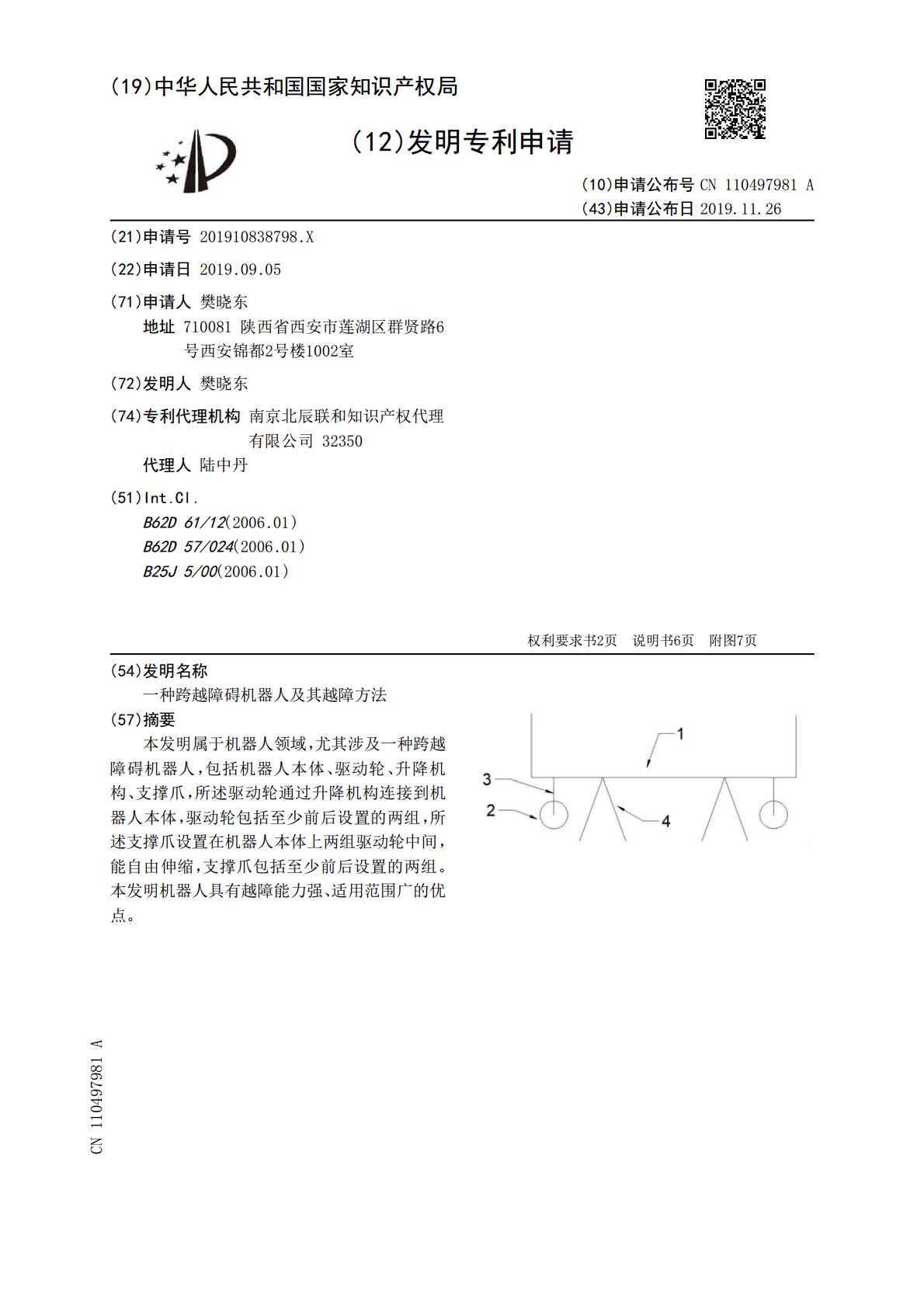
本发明属于机器人领域,尤其涉及一种跨越障碍机器人,包括机器人本体、驱动轮、升降机构、支撑爪,所述驱动轮通过升降机构连接到机器人本体,驱动轮包括至少前后设置的两组,所述支撑爪设置在机器人本体上两组驱动轮中间,能自由伸缩,支撑爪包括至少前后设置的两组。本发明机器人具有越障能力强、适用范围广的优点。

一种跨越障碍的机器人.pdf
一种跨越障碍的机器人,属于自动化设备技术领域。其特征在于:包括间隔设置的多个抱紧机构,每相邻的两个抱紧机构之间均设有推动抱紧机构移动的推拉机构,抱紧机构上设有一个或多个断开部,抱紧机构的断开部通过磁铁(12)相连从而形成断开的环形,抱紧机构内侧设有用于抱紧或松开柱或绳的抱紧动力模块,每相邻的两个抱紧机构的抱紧动力模块交替抱紧或松开柱或绳。本跨越障碍的机器人能够方便携带不同的设备且能够携带重量大的设备,还能够停留在柱或绳的任意位置,方便自身携带设备的工作,断开部通过间距调节机构的吸力连接,且断开部断开设置,

一种架空线路跨越障碍机器人.pdf
本发明提供了一种架空线路跨越障碍机器人,第二爬行板上部通过第二导向板铰接传动板中部,所述传动板中部还通过第三导向板铰接第二爬行板中部,所述第一爬行板中部与底座铰接,第二爬行板中部与底座铰接,在第一爬行板、第二爬行板和传动板下部均铰接带有轮毂电机的滚轮,在底座中部下方设有挂钩,本发明能够通过第一爬行板、第二爬行板和传动板在导线上运行,传动板带动第一爬行板和第二爬行板提升与降落,跨越输电导向上的障碍物,本发明结构简单紧凑,互换性强,可在导地线上运行,跨越输电导线上各种障碍物,由于每个爬行板的结构都相同,在越障

跨越障碍_.doc
跨越障碍授课年级:五年级人数:40一、学习理念小学五年级学生具有活泼好动和想象力丰富的身心特点,正处在身心发展的关键阶段,已具有一定的奔跑、跨越、模仿能力,并且正处在身心发展的关键阶段,有集体荣誉感,喜欢展示自己的能力。这次学习趣味跨栏跑,对学生来说是一个崭新的项目,学习积极性高,兴奋点高,安全应该是第一位的。本课采用国际田径少儿游戏器材激发学生的学习兴趣,遵循学生发展规律、根据学生特点选择多种学习方式,采用不同的组织形式,充分调动学生学习的积极性,实现本课教学目标。二、学习目标教学目标是以“终身体育”和

一种自动翻面和跨越障碍的玻璃清洁机器人及其工作方法.pdf
本发明公开了一种自动翻面和跨越障碍的玻璃清洁机器人及其工作方法,包括清洁机构,支架机构、移动机构、吸盘机构、控制系统;支架机构包括导轨,导轨上连接有移动机构,移动机构包括卡槽、移动机构内安装吸盘机构,吸盘机构包括升降机构和吸盘,吸盘连接在升降机构底部,卡槽与导轨连接,移动机构还设有驱动装置与导轨连接;导轨中部设有翻面装置;清洁机构设置于导轨两端;导轨上设有齿条,滑块的驱动装置为齿轮和齿轮电机,齿轮与导轨的齿条啮合;在导轨上设有多个限位件,限位件分别设置于移动机构的两端。本发明能够实现正常行走,跨越障碍,在