
一种基于自适应容积粒子滤波的车辆状态估计方法.pdf

代瑶****zy

1/10
2/10
3/10

4/10

5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于自适应容积粒子滤波的车辆状态估计方法.pdf
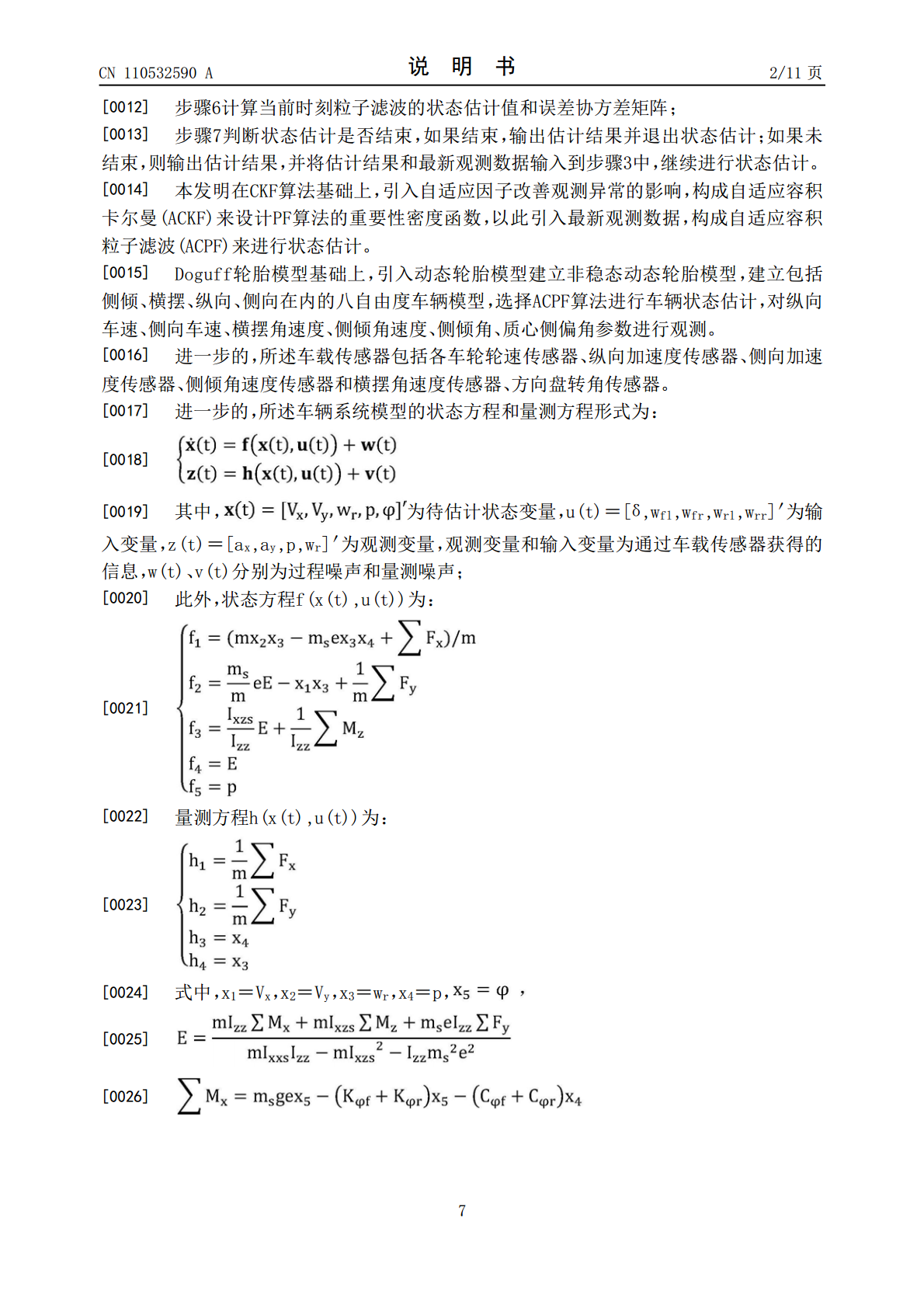
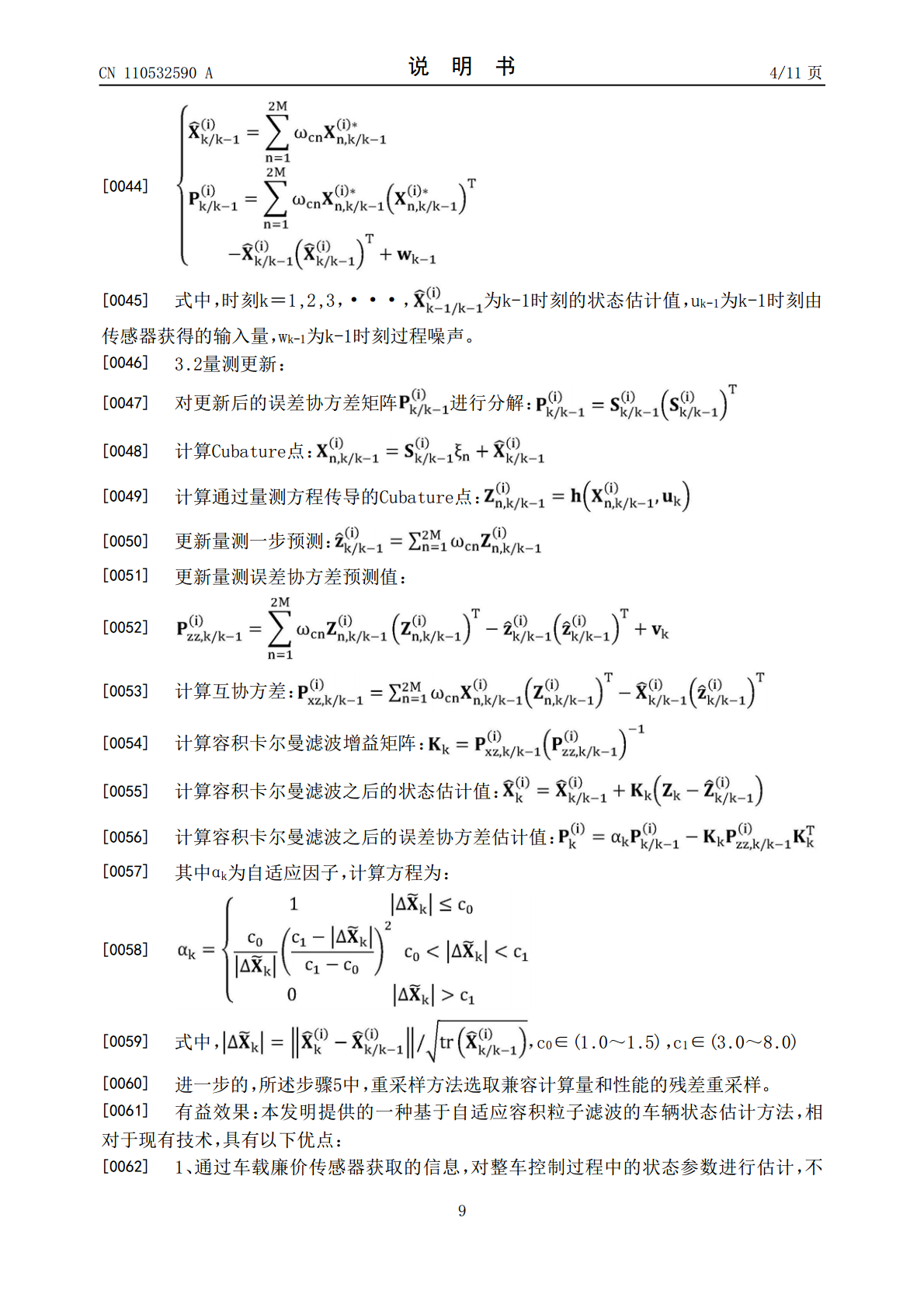
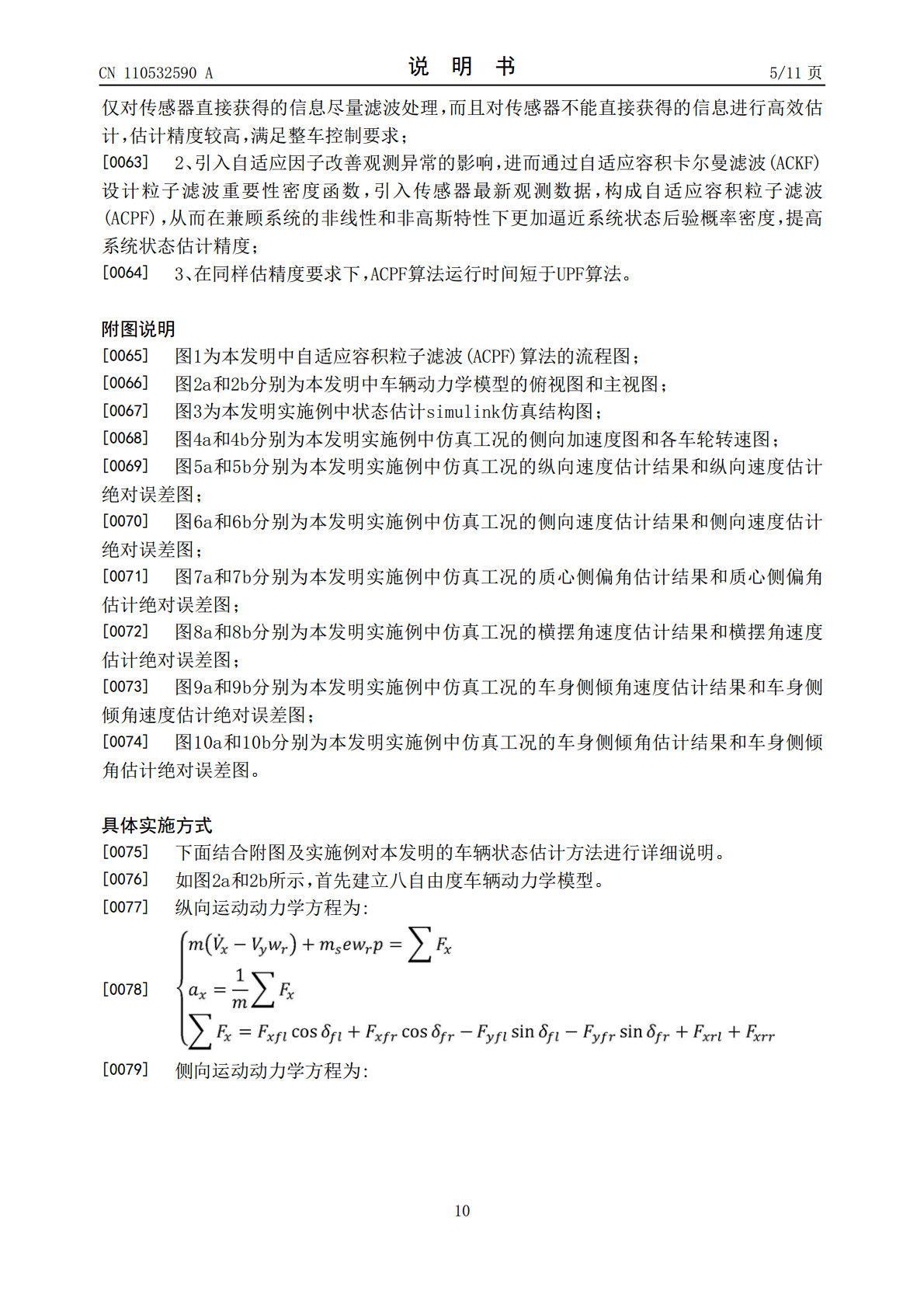
本发明公开了一种基于自适应容积粒子滤波(ACPF)的车辆状态估计方法,包括:首先基于非稳态动态轮胎模型,构建高维度非线性八自由度车辆动力学模型;其次利用自适应容积卡尔曼滤波算法更新基本粒子滤波算法的重要性密度函数,以此完成自适应容积粒子滤波算法设计;利用车载传感器信息,运用ACPF算法实现对车辆的侧倾角、质心侧偏角等关键状态变量高精度在线观测。最后搭建Simulink‑Carsim联合仿真平台进行了算法的验证,结果表明该算法状态估计精度高于传统无迹粒子滤波(UPF)算法,且算法运算效率高于UPF算法。

基于容积粒子滤波的配电网状态估计.docx
基于容积粒子滤波的配电网状态估计基于容积粒子滤波的配电网状态估计一、引言随着配电网规模的不断扩大和智能化的推进,对配电网状态的准确估计变得尤为重要。配电网状态估计是指通过对已有的测量数据进行处理和分析,从而获取配电网各个节点(包括电压、电流等)的实际值和估计误差。容积粒子滤波(CVPF)作为一种有效的状态估计方法,能够提供准确的状态估计结果,已经在多个领域得到了广泛应用。本文将介绍基于容积粒子滤波的配电网状态估计原理及其应用。二、容积粒子滤波原理容积粒子滤波是一种基于粒子滤波算法的改进方法。粒子滤波是一种
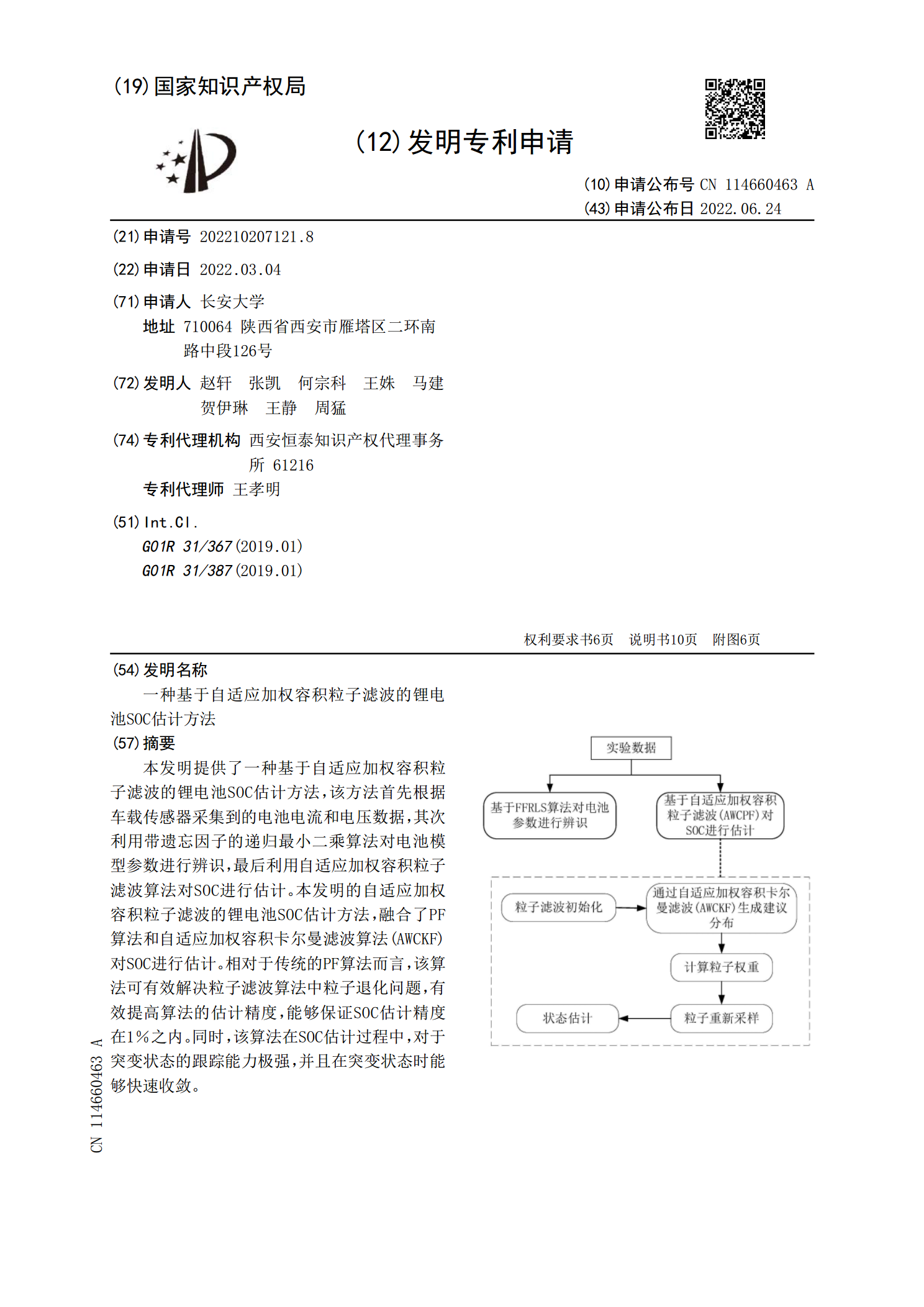
一种基于自适应加权容积粒子滤波的锂电池SOC估计方法.pdf
本发明提供了一种基于自适应加权容积粒子滤波的锂电池SOC估计方法,该方法首先根据车载传感器采集到的电池电流和电压数据,其次利用带遗忘因子的递归最小二乘算法对电池模型参数进行辨识,最后利用自适应加权容积粒子滤波算法对SOC进行估计。本发明的自适应加权容积粒子滤波的锂电池SOC估计方法,融合了PF算法和自适应加权容积卡尔曼滤波算法(AWCKF)对SOC进行估计。相对于传统的PF算法而言,该算法可有效解决粒子滤波算法中粒子退化问题,有效提高算法的估计精度,能够保证SOC估计精度在1%之内。同时,该算法在SOC估

基于Huber估计的鲁棒自适应滤波和状态估计方法.pdf
本发明提供的是一种基于Huber估计的鲁棒自适应滤波和状态估计方法。首先通过在线估计一步预测双重不确定性系统的协方差矩阵的上界来计算估计值,只对时间更新过程进行修改,同时采用线性矩阵不等式的方法进行自适应参数调整,得到应对不确定性模型的自适应无迹信息滤波器;然后应用矩阵求逆定理并采用Huber估计的方法对量测更新过程进行修改,得到最终的估计值。本发明的滤波和状态估计的精度高,稳定性好。所提出的鲁棒自适应滤波和状态估计方法解决了双重不确定无人艇的滤波和状态估计问题,即保留了信息滤波器结构的优点有提高了滤波和

基于辅助粒子滤波算法的车辆行驶状态和参数联合估计方法研究.docx
基于辅助粒子滤波算法的车辆行驶状态和参数联合估计方法研究基于辅助粒子滤波算法的车辆行驶状态和参数联合估计方法研究摘要:随着车辆自动驾驶技术的快速发展,对车辆行驶状态和参数的准确估计成为了自动驾驶系统的关键问题。本文针对这一问题,提出了一种基于辅助粒子滤波算法的车辆行驶状态和参数联合估计方法。通过辅助粒子滤波算法结合车辆系统模型和传感器数据,能够相对准确地估计车辆的状态和参数,提高车辆自动驾驶系统的性能和安全性。关键词:车辆行驶状态;车辆参数;辅助粒子滤波算法;自动驾驶1.引言随着科技的快速发展,自动驾驶技