
基于Huber估计的鲁棒自适应滤波和状态估计方法.pdf

琰琬****买买

1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于Huber估计的鲁棒自适应滤波和状态估计方法.pdf
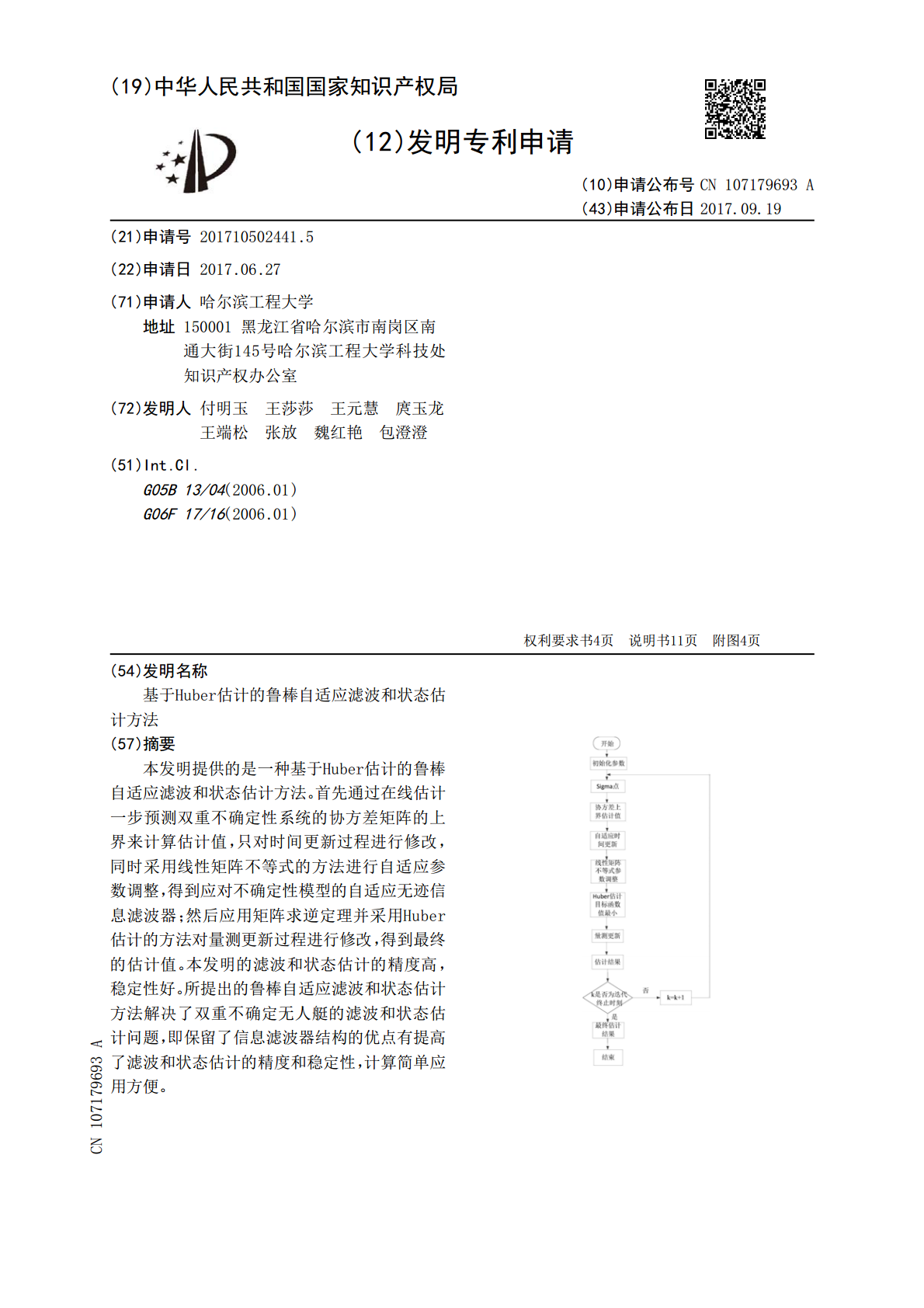
本发明提供的是一种基于Huber估计的鲁棒自适应滤波和状态估计方法。首先通过在线估计一步预测双重不确定性系统的协方差矩阵的上界来计算估计值,只对时间更新过程进行修改,同时采用线性矩阵不等式的方法进行自适应参数调整,得到应对不确定性模型的自适应无迹信息滤波器;然后应用矩阵求逆定理并采用Huber估计的方法对量测更新过程进行修改,得到最终的估计值。本发明的滤波和状态估计的精度高,稳定性好。所提出的鲁棒自适应滤波和状态估计方法解决了双重不确定无人艇的滤波和状态估计问题,即保留了信息滤波器结构的优点有提高了滤波和

基于鲁棒H无穷滤波的步进电机转子状态估计.docx
基于鲁棒H无穷滤波的步进电机转子状态估计基于鲁棒H无穷滤波的步进电机转子状态估计摘要:步进电机是一种常用的精密控制设备,但由于其机械特性和外部干扰的影响,步进电机转子状态的准确估计一直是一个挑战。本文提出了一种基于鲁棒H无穷滤波的方法,用于实时估计步进电机转子状态。通过对步进电机的数学模型建立和对其系统噪声和测量噪声的分析,我们设计了鲁棒H无穷滤波器的结构和参数,并通过仿真和实验验证了该方法的有效性。关键词:步进电机,转子状态估计,鲁棒H无穷滤波,系统噪声,测量噪声引言:步进电机是一种常用的精密定位设备,

基于状态估计的摩擦模糊建模与鲁棒自适应控制.docx
基于状态估计的摩擦模糊建模与鲁棒自适应控制摘要:实现机器人的自适应控制是该领域的研究热点。本文利用状态估计的方法,提出了一种基于摩擦模糊建模和鲁棒自适应控制的模型。该模型可以有效地控制机器人运动以协调不同的状态和环境。模型的成功实现可以为机器人的运动控制研究提供重要的理论和实践指导。1.研究背景和意义机器人的自适应控制是实现智能机器人和自动驾驶等领域的必要条件。随着机器人技术的不断发展和应用领域的不断拓展,如何实现机器人的高效、精确的运动控制成为了研究热点。此外,在机器人的控制系统中,摩擦是一个普遍存在的

基于改进鲁棒自适应UKF的配电网动态状态估计方法.docx
基于改进鲁棒自适应UKF的配电网动态状态估计方法基于改进鲁棒自适应UKF的配电网动态状态估计方法摘要:配电网动态状态的准确估计对于实现可靠、安全、高效的电力系统运行至关重要。本文提出一种基于改进鲁棒自适应无迹卡尔曼滤波(UnscentedKalmanFilter,UKF)的配电网动态状态估计方法。传统的UKF算法在配电网故障或不稳定条件下可能引入较大的估计误差,本文通过引入鲁棒自适应技术,提高了算法的鲁棒性和适应性。首先,通过建立配电网状态估计模型,将配电网的状态量估计问题转化为一个动态状态估计问题。然后

基于M估计的鲁棒自适应滤波算法在同声消除中的应用.docx
基于M估计的鲁棒自适应滤波算法在同声消除中的应用随着语音信号处理的需求不断增加,同声消除技术成为现代通信领域的一个重要技术,能显著降低通信中的噪音和干扰恶化信号质量,提高语音和信号的有效性和可靠性。在同声消除中,滤波算法是实现该技术的关键。然而,在真实的环境中,常常会出现不同类型的噪声和信号变化,这就使得基于传统滤波技术的同声消除算法受到了很大的挑战。M估计法是一种鲁棒性好、具有自适应性的滤波方法,广泛地应用于同声消除中。基于M估计的鲁棒自适应滤波算法可以有效地降低语音信号中的噪声和干扰,提高语音信号的质