
一种牵引自行两用式AGV及其控制方法.pdf

是立****92

1/8
2/8
3/8
4/8

5/8

6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种牵引自行两用式AGV及其控制方法.pdf
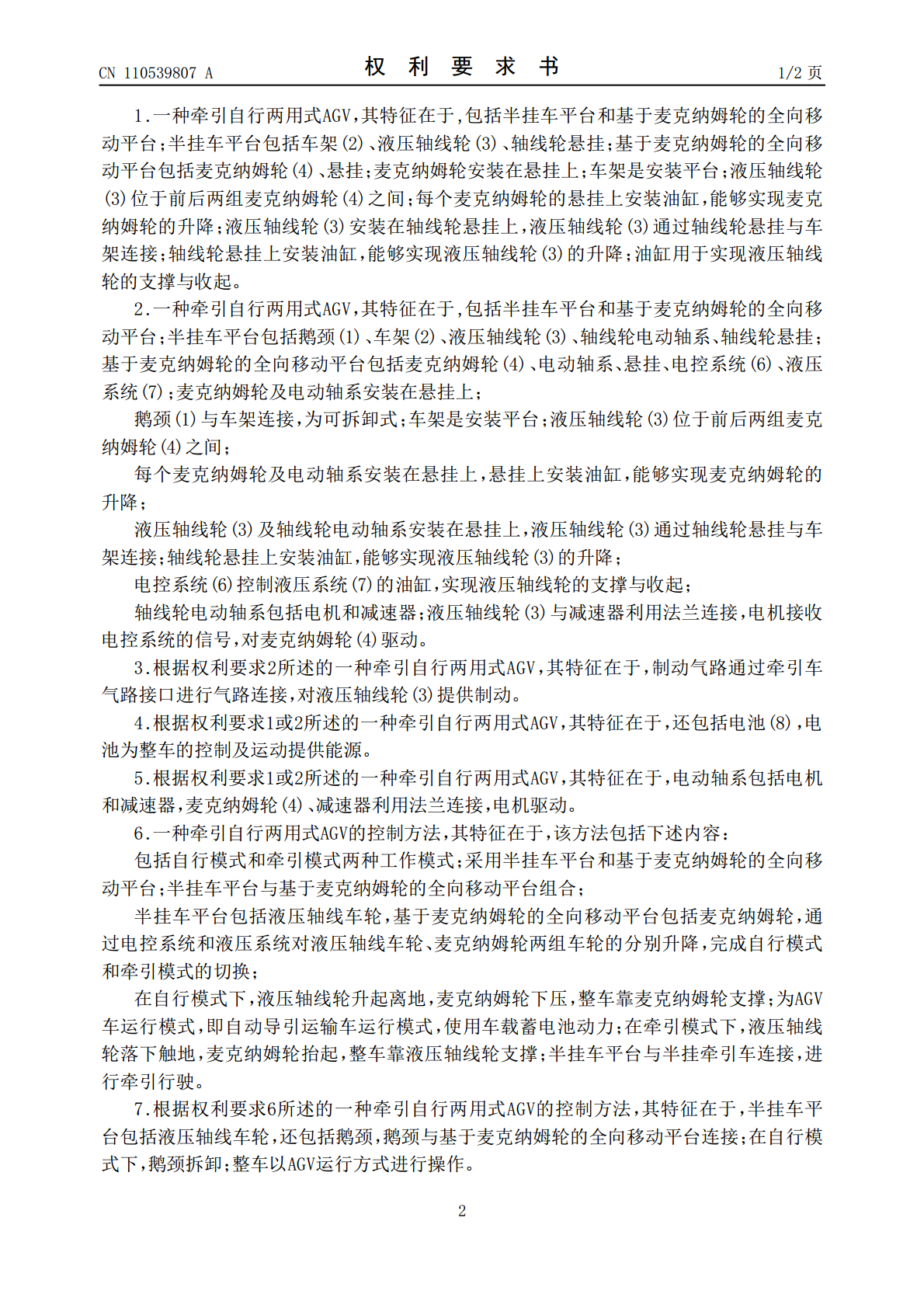
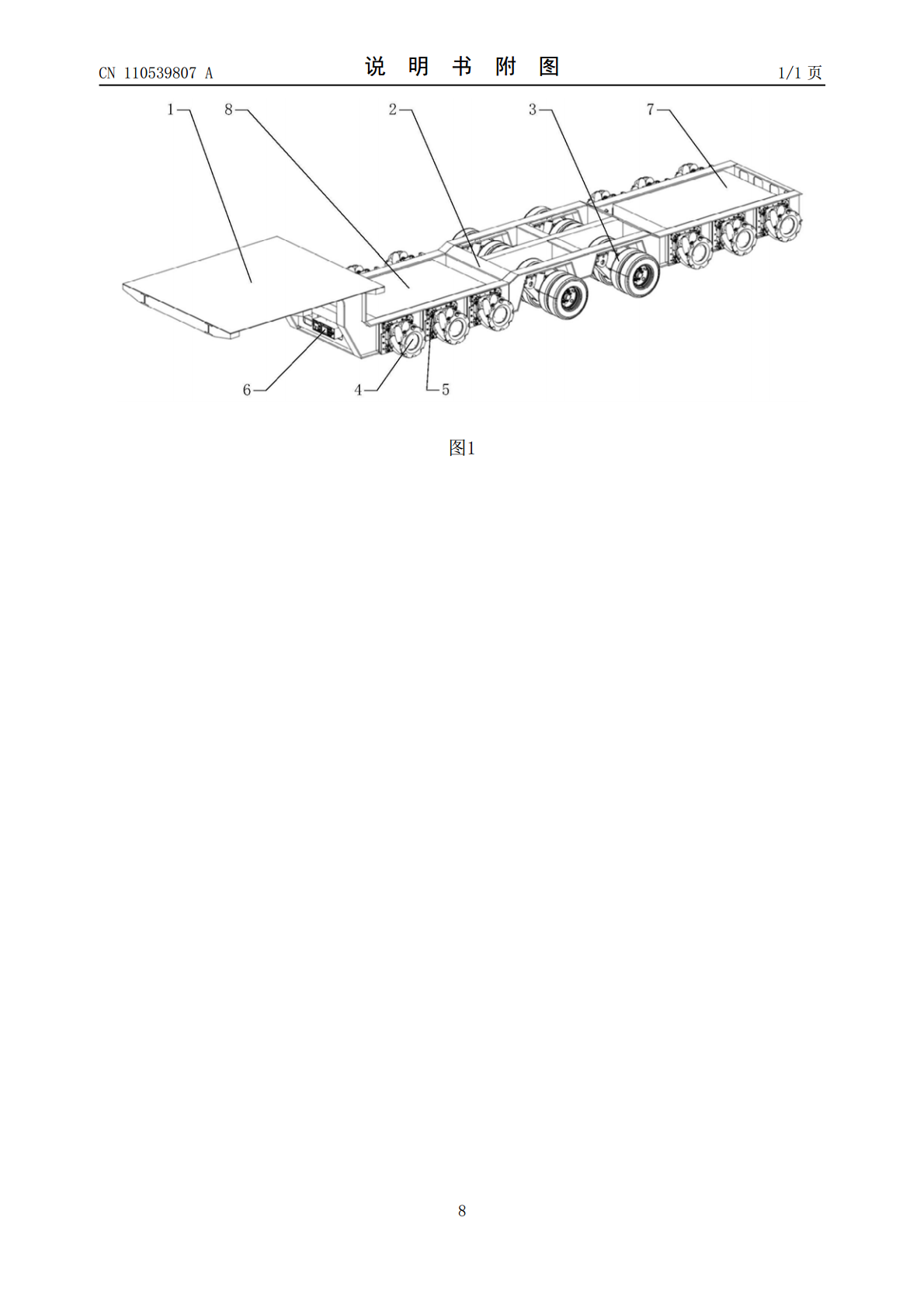
本发明公开了一种牵引自行两用式AGV及其控制方法,属于工业物流领域,能够实现两种工作模式,解决单独的自行式大吨位AGV设备及半挂车平台存在的问题。包括半挂车平台和基于麦克纳姆轮的全向移动平台;可完成自行模式和牵引模式的切换。在自行模式下,该AGV和普通AGV一样,全向移动,使用车载蓄电池动力,可人工操控或自主导航完成搬运等工作;在牵引模式下,该AGV可与标准半挂牵引车连接,可空载转场至其他地点,或负载作为普通半挂车使用。
一种增程式牵引自行两用AGV.pdf
本发明提供一种增程式牵引自行两用AGV,属于工业物流运输设备技术领域,其设备的能源来源为车载发电机组,发电机组安装在增程式牵引自行两用AGV上,由发电机组为增程式牵引自行两用AGV的电气设备、电机进行供电;牵引自行两用式AGV具体限定为:包括自行模式和牵引模式两种工作模式;其控制方法包括下述内容:采用半挂车平台和基于麦克纳姆轮的全向移动平台。同现有技术相比,本发明的有益效果为“提高AGV运行效率,降低企业投入成本,适应恶劣、特殊的保障环境”。
一种轨道列车转向架牵引AGV及其控制方法.pdf
本发明公开了一种轨道列车转向架牵引AGV及其控制方法,其中AGV:包括框架、调度系统、导航系统、控制系统、至少4个驱动轮、至少2个伸缩轮组件以及至少2个接近开关,框架为马蹄形结构,并横跨2条铁轨,驱动轮对称安装在框架上,并位于2条铁轨的外侧,至少2个伸缩轮组件和接近开关分别对称设置在框架的内侧;牵引转向架时,伸缩轮组件的伸缩轮伸出,将转向架轮对限定在框架内,伸缩轮与转向架轮对周侧相抵,并位于转向架轮对斜下方;牵引转向架至目标区域后,伸缩轮缩回,AGV与转向架分离,返回待机位置。上述AGV及控制方法能够自行
一种牵引式AGV小车.pdf
本发明公开了一种牵引式AGV小车,包括车架,所述的车架的底部设置有四套自带动力的轮式驱动装置,所述车架内设置有用于顶起货物的顶杆装置,所述车架与各个轮式驱动装置之间设置有使轮式驱动装置始终保持完全着地的减震装置,所述减震装置一端固定于车架底端,另一端固定于驱动装置上。本发明可有效对安装有全向轮的货架进行牵引,使用减震装置降低该装置输出轮的刚性,避免由于路面不平导致拖运过程中的不稳定现象,增加该拖运装置运行的稳定性和可靠性。
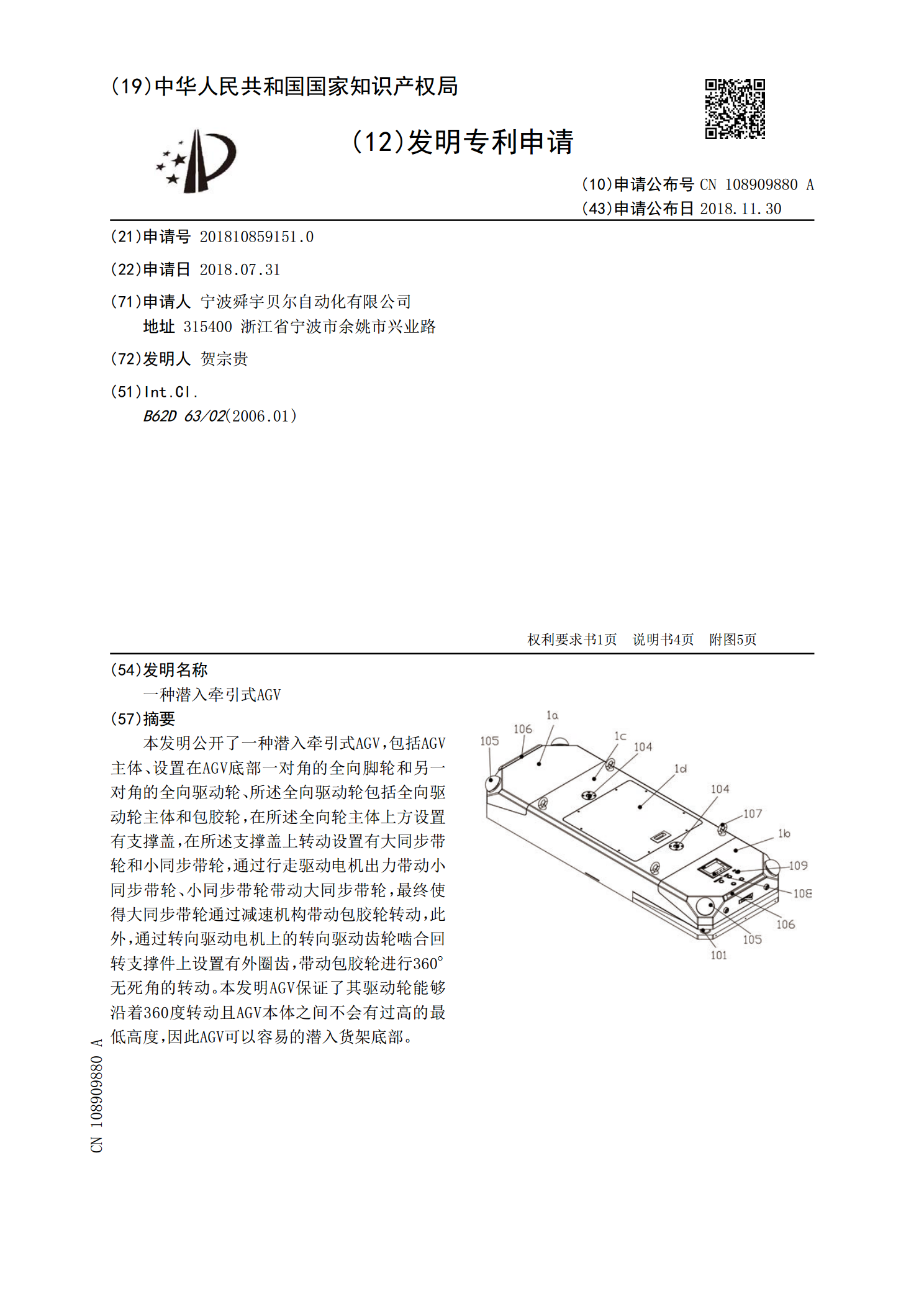
一种潜入牵引式AGV.pdf
本发明公开了一种潜入牵引式AGV,包括AGV主体、设置在AGV底部一对角的全向脚轮和另一对角的全向驱动轮、所述全向驱动轮包括全向驱动轮主体和包胶轮,在所述全向轮主体上方设置有支撑盖,在所述支撑盖上转动设置有大同步带轮和小同步带轮,通过行走驱动电机出力带动小同步带轮、小同步带轮带动大同步带轮,最终使得大同步带轮通过减速机构带动包胶轮转动,此外,通过转向驱动电机上的转向驱动齿轮啮合回转支撑件上设置有外圈齿,带动包胶轮进行360°无死角的转动。本发明AGV保证了其驱动轮能够沿着360度转动且AGV本体之间不会有