
一种潜入牵引式AGV.pdf

猫巷****忠娟

1/10

2/10

3/10
4/10

5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种潜入牵引式AGV.pdf
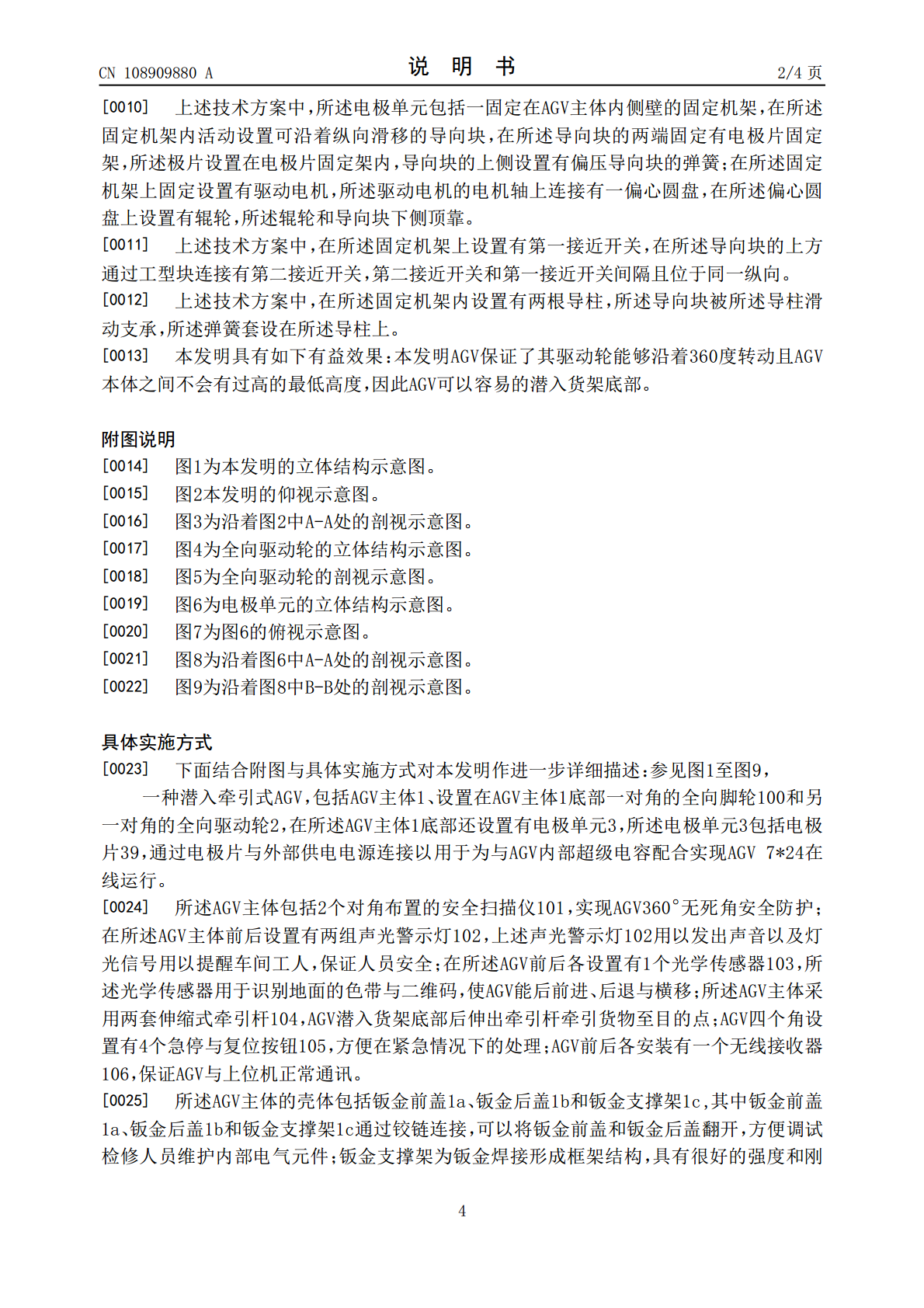
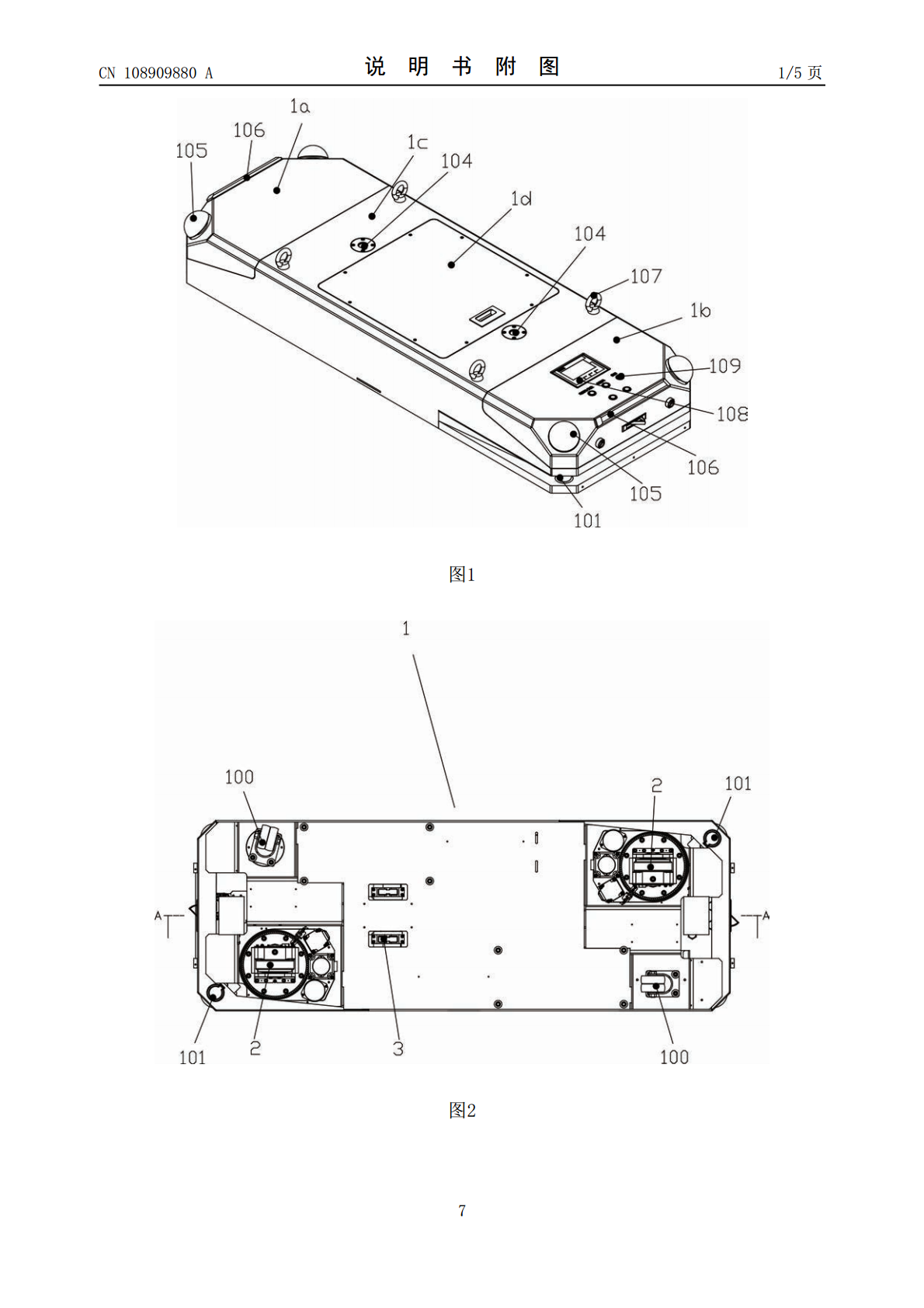
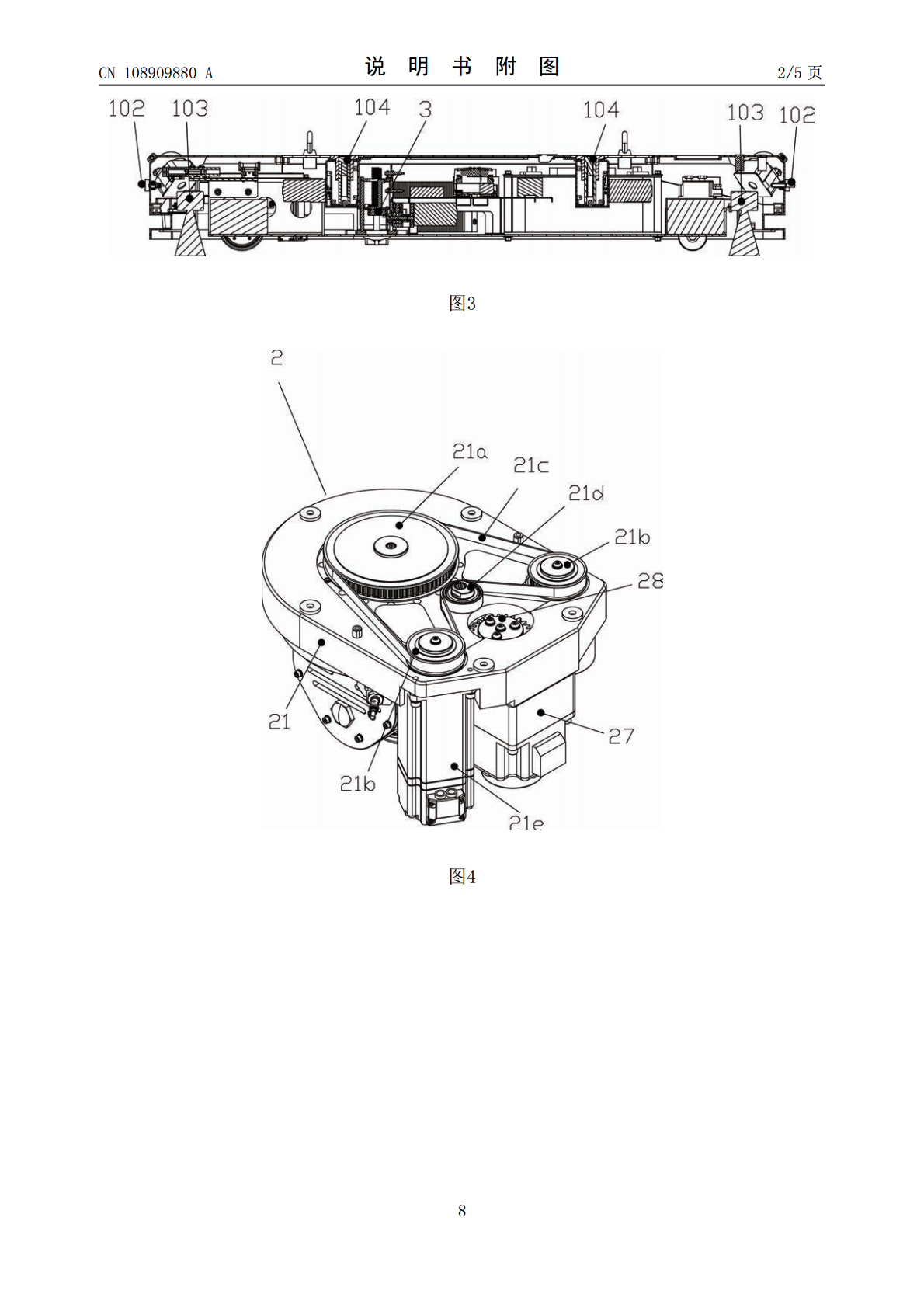
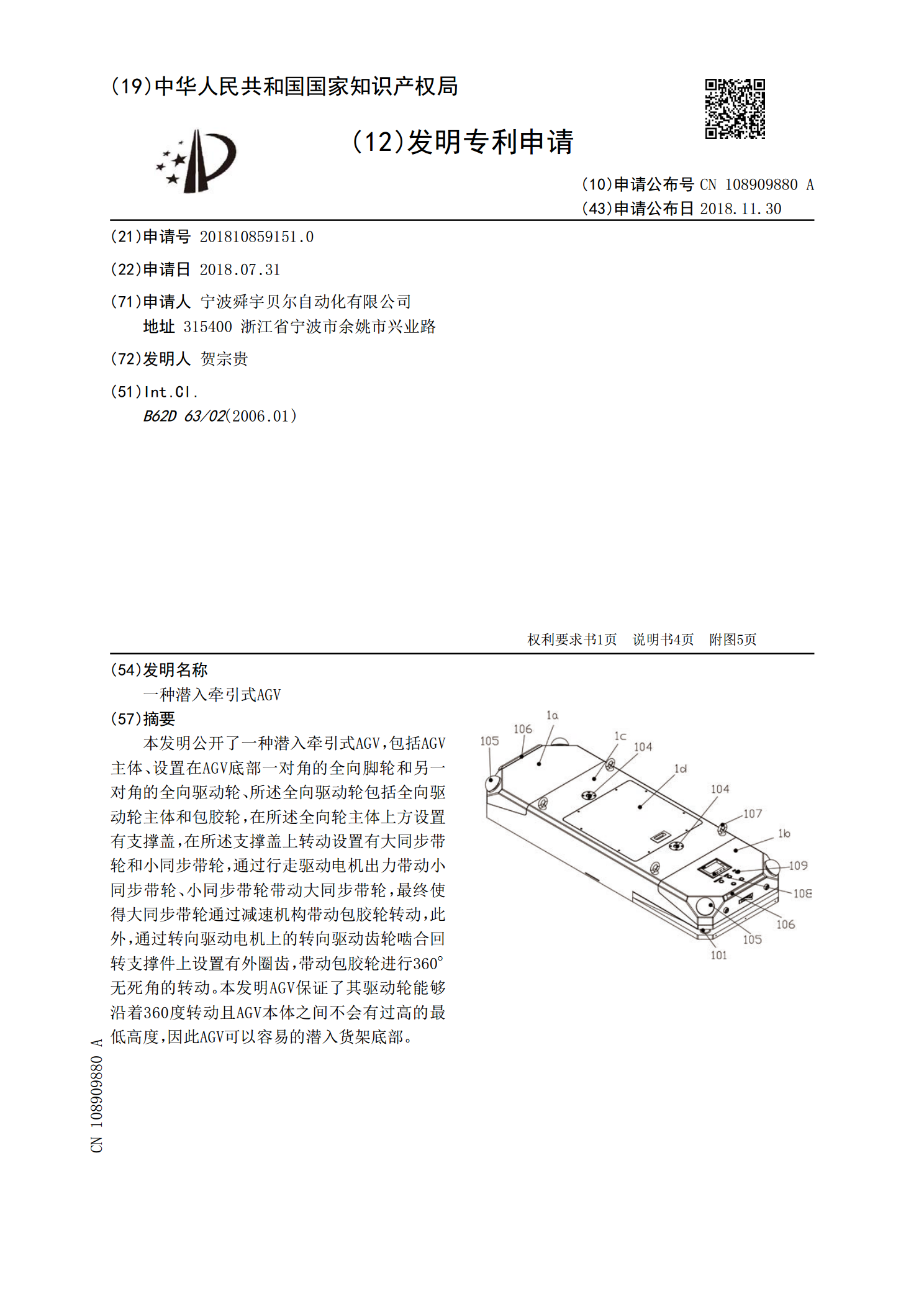
本发明公开了一种潜入牵引式AGV,包括AGV主体、设置在AGV底部一对角的全向脚轮和另一对角的全向驱动轮、所述全向驱动轮包括全向驱动轮主体和包胶轮,在所述全向轮主体上方设置有支撑盖,在所述支撑盖上转动设置有大同步带轮和小同步带轮,通过行走驱动电机出力带动小同步带轮、小同步带轮带动大同步带轮,最终使得大同步带轮通过减速机构带动包胶轮转动,此外,通过转向驱动电机上的转向驱动齿轮啮合回转支撑件上设置有外圈齿,带动包胶轮进行360°无死角的转动。本发明AGV保证了其驱动轮能够沿着360度转动且AGV本体之间不会有
一种牵引式AGV小车.pdf
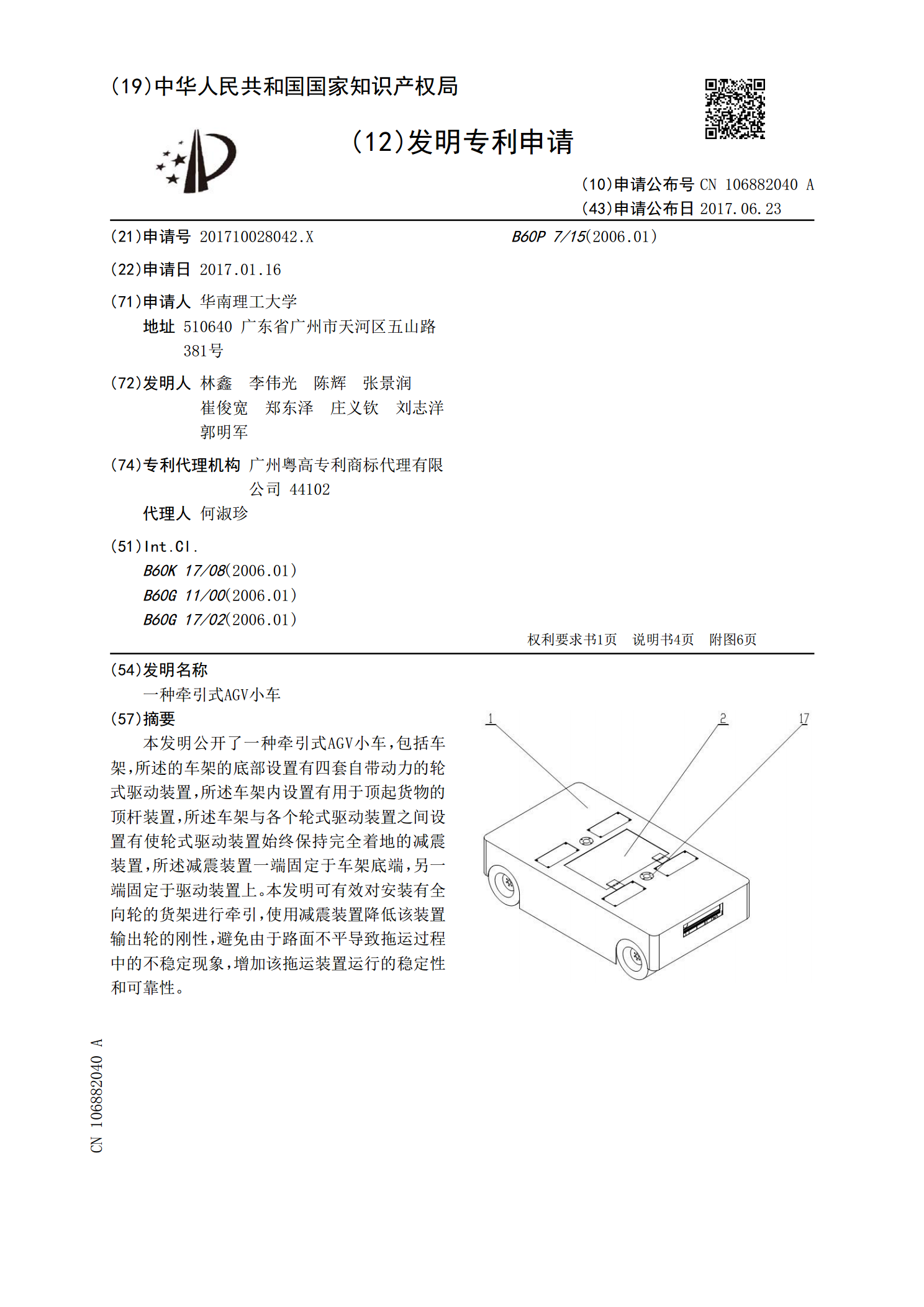
本发明公开了一种牵引式AGV小车,包括车架,所述的车架的底部设置有四套自带动力的轮式驱动装置,所述车架内设置有用于顶起货物的顶杆装置,所述车架与各个轮式驱动装置之间设置有使轮式驱动装置始终保持完全着地的减震装置,所述减震装置一端固定于车架底端,另一端固定于驱动装置上。本发明可有效对安装有全向轮的货架进行牵引,使用减震装置降低该装置输出轮的刚性,避免由于路面不平导致拖运过程中的不稳定现象,增加该拖运装置运行的稳定性和可靠性。

一种潜入式AGV导航小车及其控制方法.pdf
一种潜入式AGV导航小车,包括车体焊接结构及外壳、报警防撞保护装置、升降定位锁定装置、驱动单元、控制单元、导航定位装置、万向从动轮、定向轮。车体焊接结构固定AGV各单元与装置,报警防撞保护装置包括障碍识别感应器、防撞胶条、声光感应器、显示屏、急停开关、前盖,升降定位锁定装置包括升降杆、升降电机、升降杆套、弹簧限位板、销轴挡板及固定钣金;地轮驱动装置设置左右二轮对称于车体中间,采用差速驱动方式;控制单元使用基于ARM双处理器的控制系统,包括控制板、电机驱动、驱动器固定板、ARM处理器、蓄电池、电池承载座。以
一种潜入全向移动式AGV的弹性浮动结构.pdf
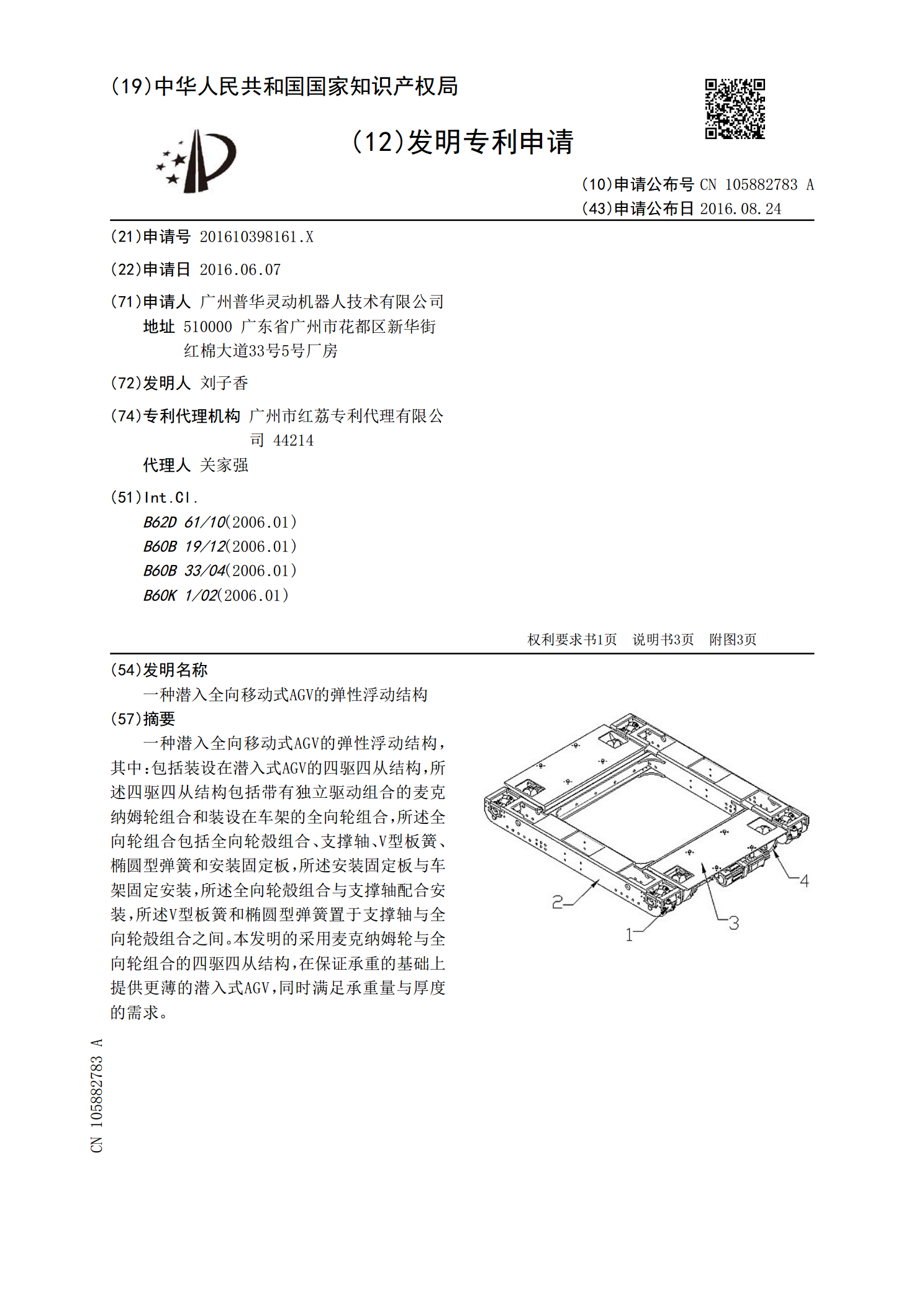
一种潜入全向移动式AGV的弹性浮动结构,其中:包括装设在潜入式AGV的四驱四从结构,所述四驱四从结构包括带有独立驱动组合的麦克纳姆轮组合和装设在车架的全向轮组合,所述全向轮组合包括全向轮殻组合、支撑轴、V型板簧、椭圆型弹簧和安装固定板,所述安装固定板与车架固定安装,所述全向轮殻组合与支撑轴配合安装,所述V型板簧和椭圆型弹簧置于支撑轴与全向轮殻组合之间。本发明的采用麦克纳姆轮与全向轮组合的四驱四从结构,在保证承重的基础上提供更薄的潜入式AGV,同时满足承重量与厚度的需求。
一种超薄重载举升潜入全向移动式AGV.pdf
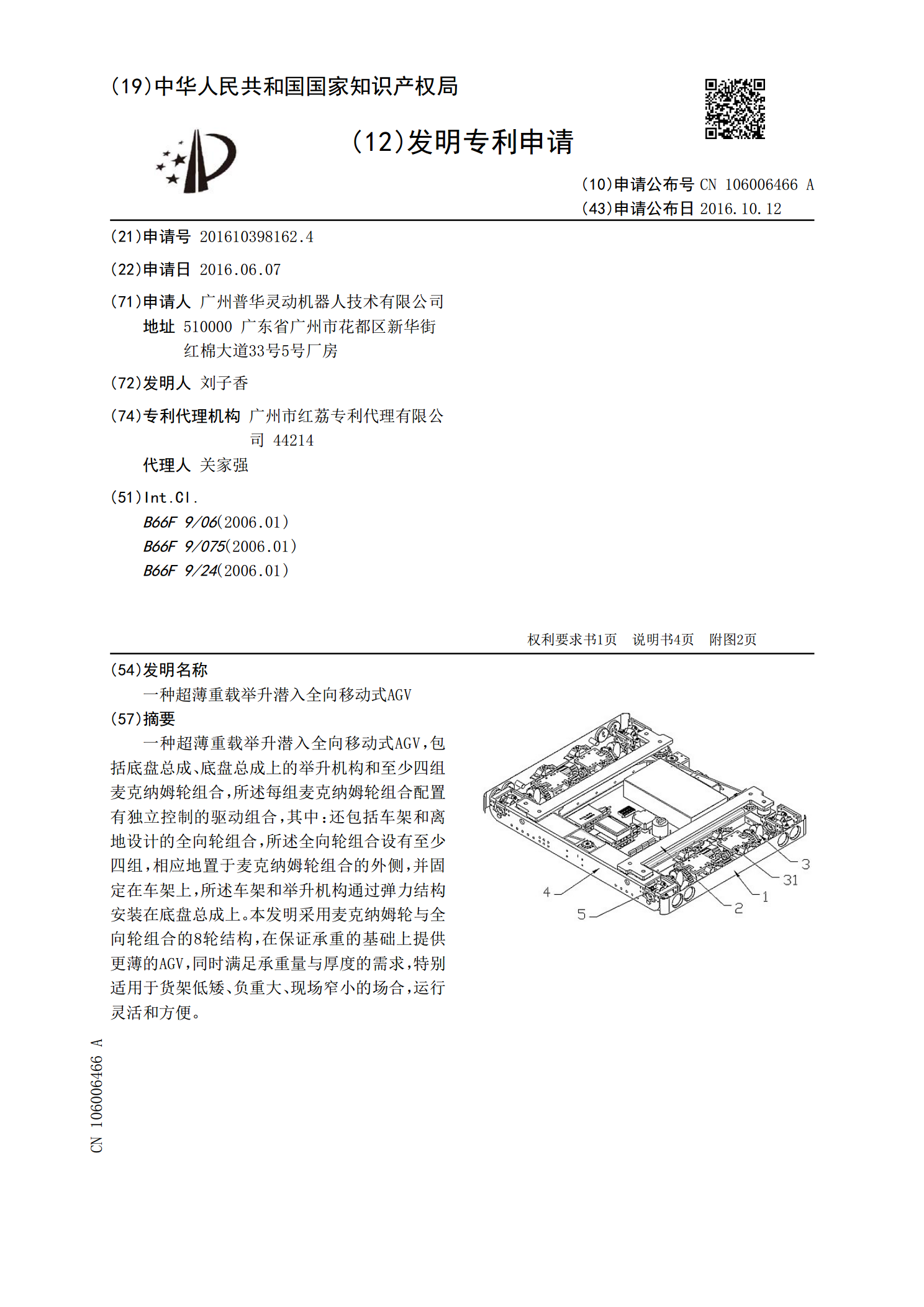
一种超薄重载举升潜入全向移动式AGV,包括底盘总成、底盘总成上的举升机构和至少四组麦克纳姆轮组合,所述每组麦克纳姆轮组合配置有独立控制的驱动组合,其中:还包括车架和离地设计的全向轮组合,所述全向轮组合设有至少四组,相应地置于麦克纳姆轮组合的外侧,并固定在车架上,所述车架和举升机构通过弹力结构安装在底盘总成上。本发明采用麦克纳姆轮与全向轮组合的8轮结构,在保证承重的基础上提供更薄的AGV,同时满足承重量与厚度的需求,特别适用于货架低矮、负重大、现场窄小的场合,运行灵活和方便。