
一种用于管道维护的爬行机器人.pdf

一条****涛k

1/6

2/6
3/6

4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种用于管道维护的爬行机器人.pdf
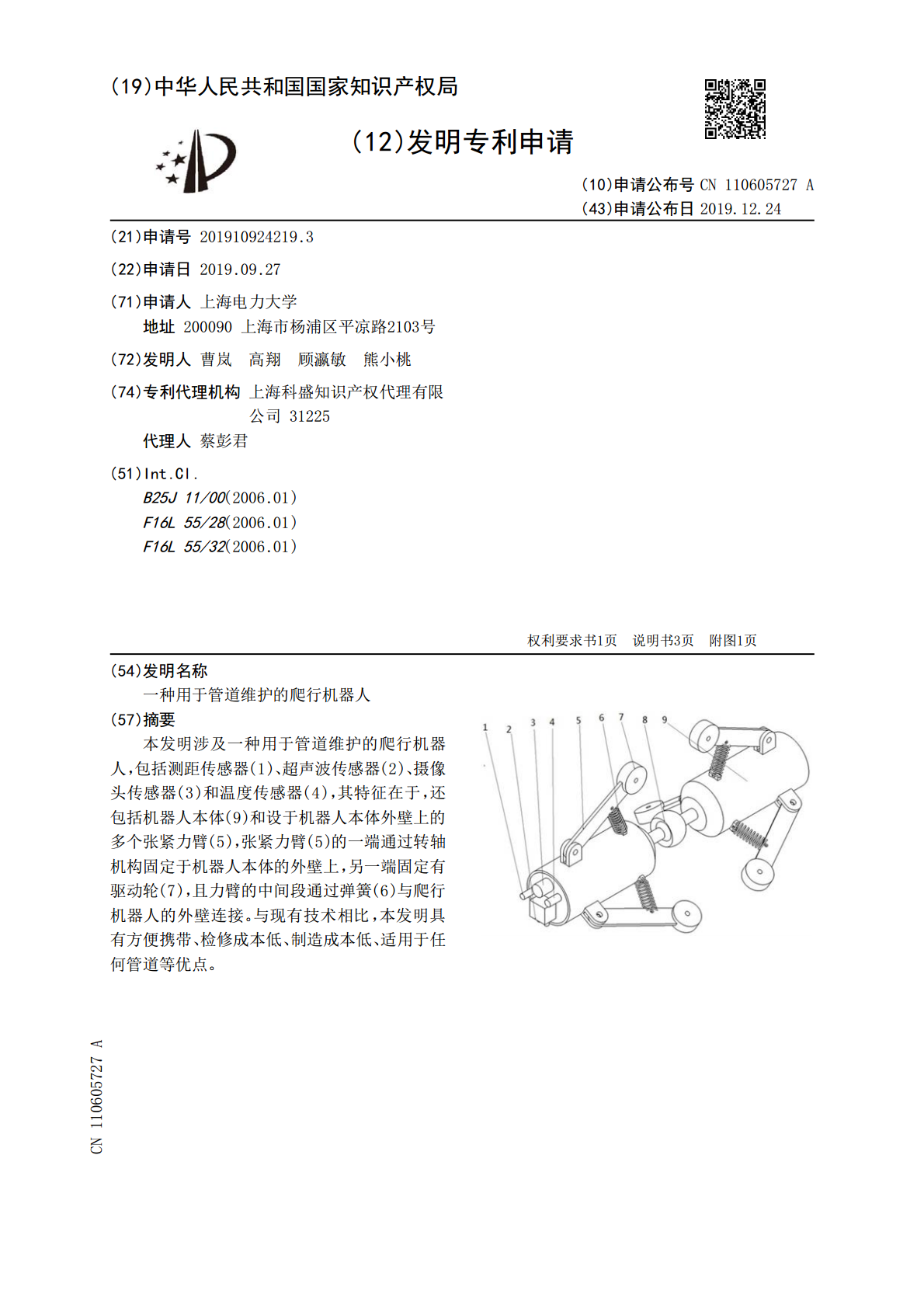
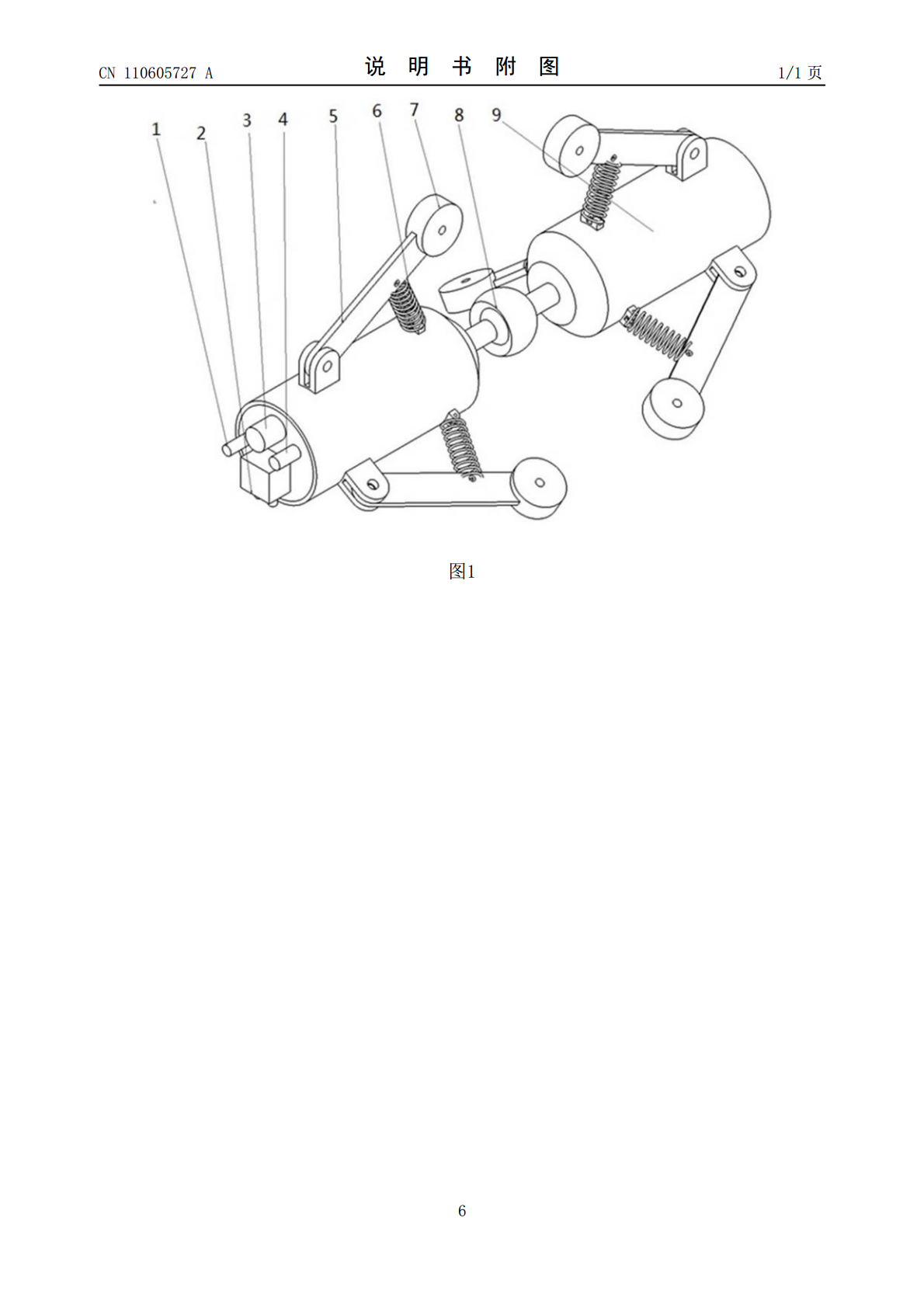
本发明涉及一种用于管道维护的爬行机器人,包括测距传感器(1)、超声波传感器(2)、摄像头传感器(3)和温度传感器(4),其特征在于,还包括机器人本体(9)和设于机器人本体外壁上的多个张紧力臂(5),张紧力臂(5)的一端通过转轴机构固定于机器人本体的外壁上,另一端固定有驱动轮(7),且力臂的中间段通过弹簧(6)与爬行机器人的外壁连接。与现有技术相比,本发明具有方便携带、检修成本低、制造成本低、适用于任何管道等优点。
一种用于管道爬行的反恐机器人.pdf
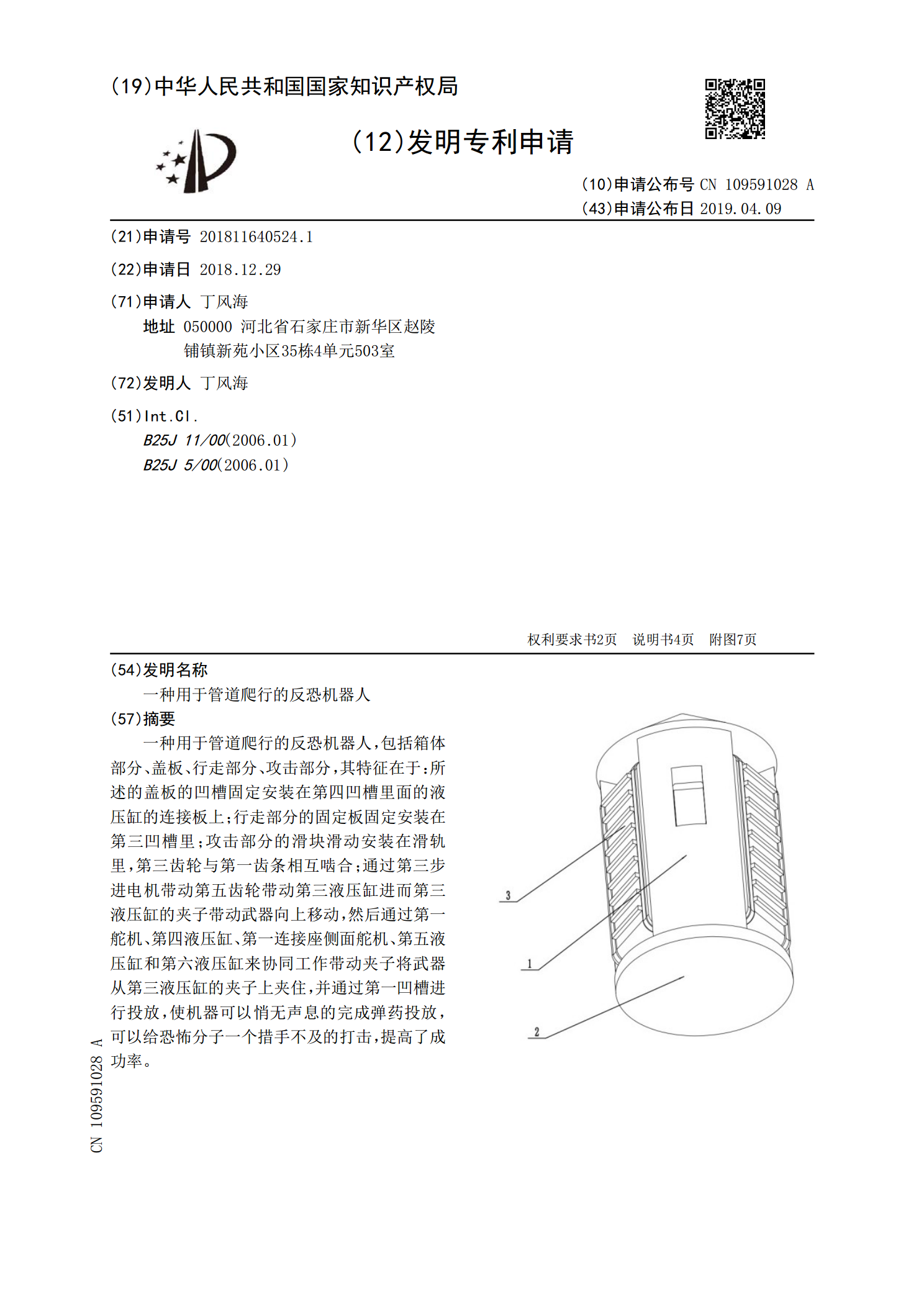
一种用于管道爬行的反恐机器人,包括箱体部分、盖板、行走部分、攻击部分,其特征在于:所述的盖板的凹槽固定安装在第四凹槽里面的液压缸的连接板上;行走部分的固定板固定安装在第三凹槽里;攻击部分的滑块滑动安装在滑轨里,第三齿轮与第一齿条相互啮合;通过第三步进电机带动第五齿轮带动第三液压缸进而第三液压缸的夹子带动武器向上移动,然后通过第一舵机、第四液压缸、第一连接座侧面舵机、第五液压缸和第六液压缸来协同工作带动夹子将武器从第三液压缸的夹子上夹住,并通过第一凹槽进行投放,使机器可以悄无声息的完成弹药投放,可以给恐怖分

用于管道内爬行机器人的行走装置.pdf
本发明公开了用于管道内爬行机器人的行走装置,包括固定壳、液压装置和伸缩器,其所述固定壳矩形空腔体,且固定壳内部设置有液压装置,所述液压装置由液压撑杆、液压动力单元、液压伸缩杆和连接器,所述液压撑杆设置于固定壳内腔前后两端,且两支液压撑杆通过连接器相连接,所述连接器为液压连接管,且连接器右部设置有液压动力单元;所述液压撑杆通过连接杆与液压伸缩杆相连接,且液压伸缩杆下部设置有伸缩器,所述伸缩器通过伸缩杆与驱动电机相连接,且驱动电机驱动轴上设置有车轮。本发明用于解决机器人在管道内遇到障碍物时难以通过的问题,同时
一种管道爬行机器人及其爬行方法.pdf
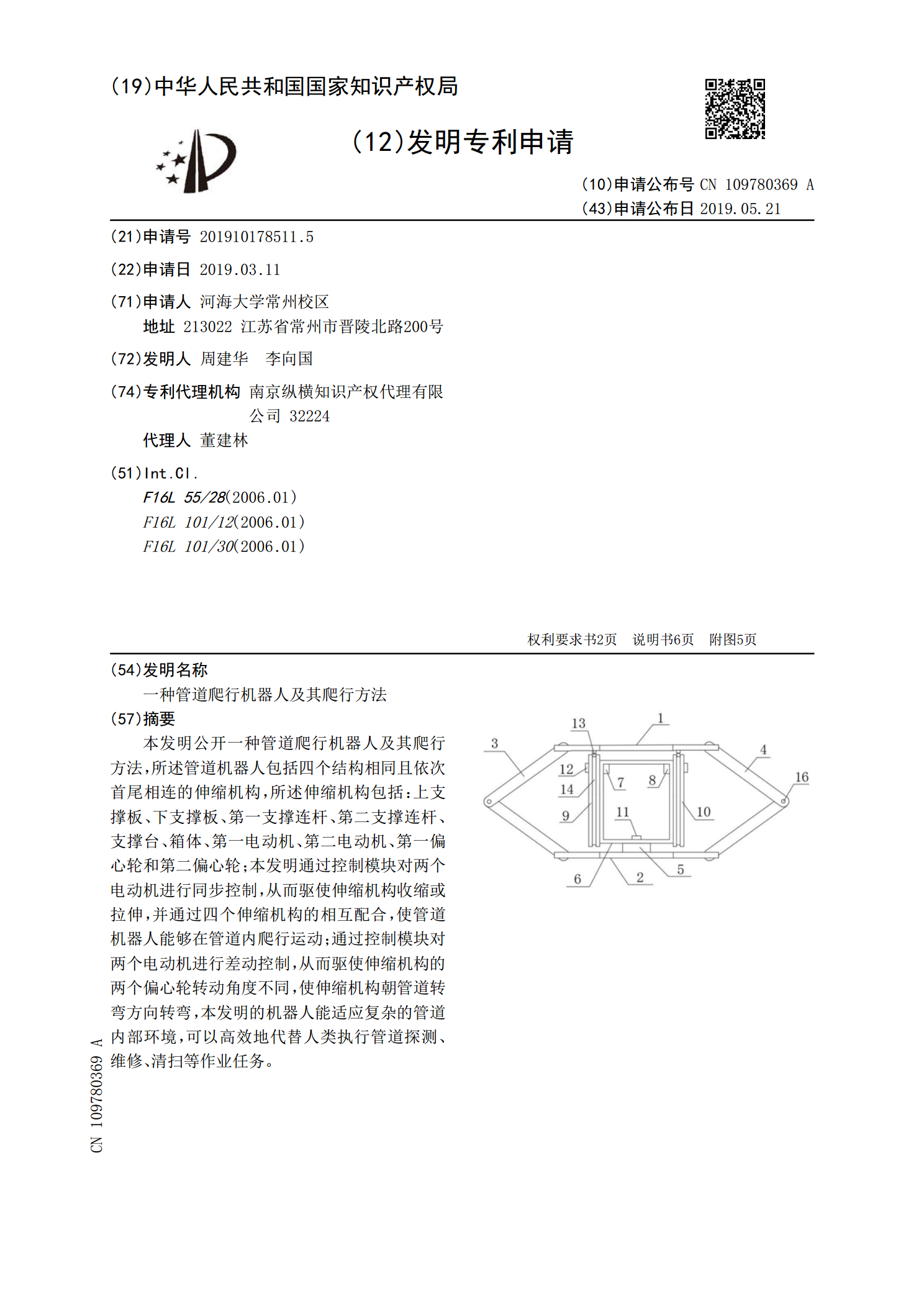
本发明公开一种管道爬行机器人及其爬行方法,所述管道机器人包括四个结构相同且依次首尾相连的伸缩机构,所述伸缩机构包括:上支撑板、下支撑板、第一支撑连杆、第二支撑连杆、支撑台、箱体、第一电动机、第二电动机、第一偏心轮和第二偏心轮;本发明通过控制模块对两个电动机进行同步控制,从而驱使伸缩机构收缩或拉伸,并通过四个伸缩机构的相互配合,使管道机器人能够在管道内爬行运动;通过控制模块对两个电动机进行差动控制,从而驱使伸缩机构的两个偏心轮转动角度不同,使伸缩机构朝管道转弯方向转弯,本发明的机器人能适应复杂的管道内部环境
一种用于高温压力管道检测机器人的爬行装置.pdf
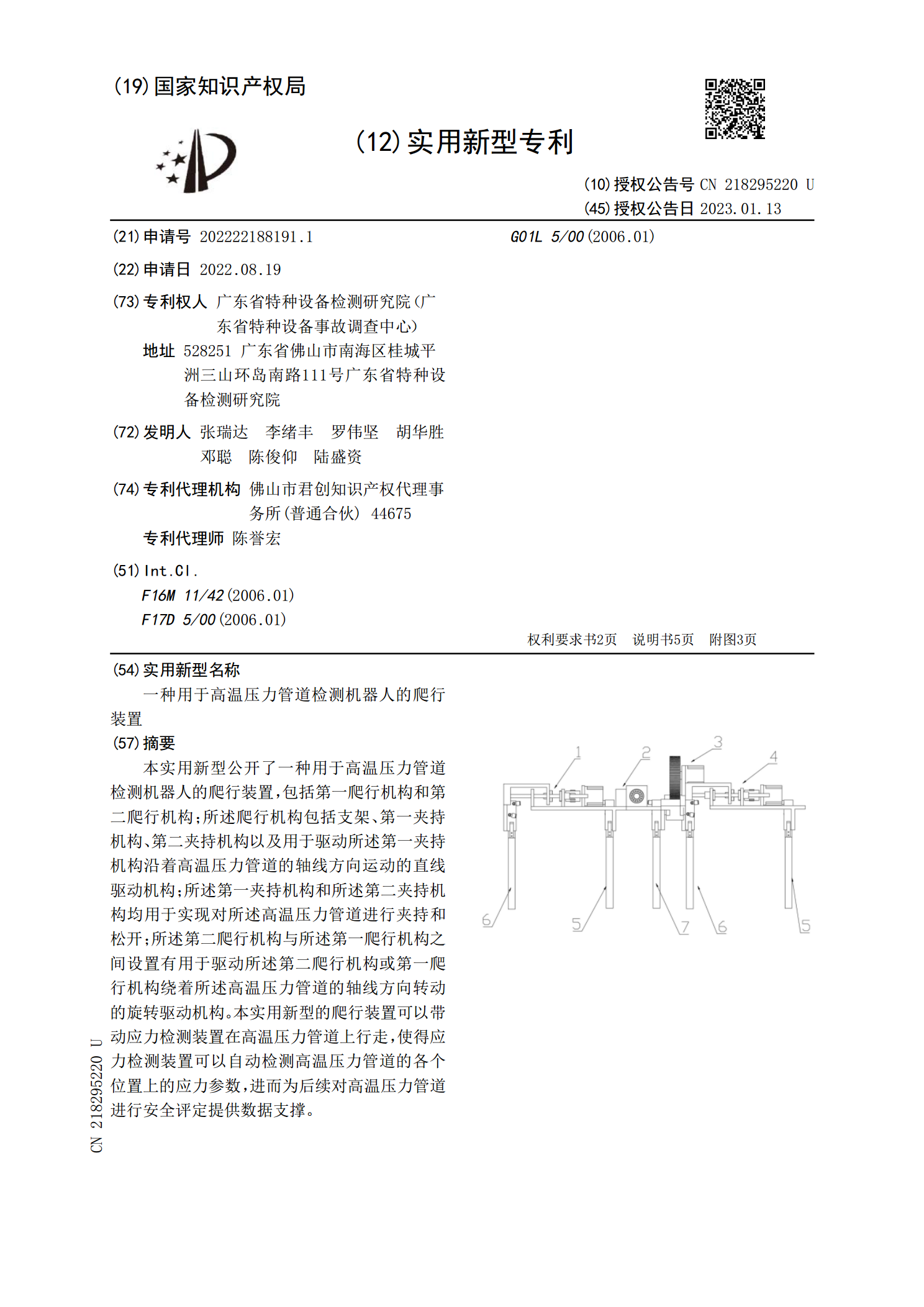
本实用新型公开了一种用于高温压力管道检测机器人的爬行装置,包括第一爬行机构和第二爬行机构;所述爬行机构包括支架、第一夹持机构、第二夹持机构以及用于驱动所述第一夹持机构沿着高温压力管道的轴线方向运动的直线驱动机构;所述第一夹持机构和所述第二夹持机构均用于实现对所述高温压力管道进行夹持和松开;所述第二爬行机构与所述第一爬行机构之间设置有用于驱动所述第二爬行机构或第一爬行机构绕着所述高温压力管道的轴线方向转动的旋转驱动机构。本实用新型的爬行装置可以带动应力检测装置在高温压力管道上行走,使得应力检测装置可以自动检