
确定传感器轨道、计算且均匀化研磨进度、停止研磨装置的方法、记录介质及基板研磨装置.pdf

书生****萌哒


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
确定传感器轨道、计算且均匀化研磨进度、停止研磨装置的方法、记录介质及基板研磨装置.pdf
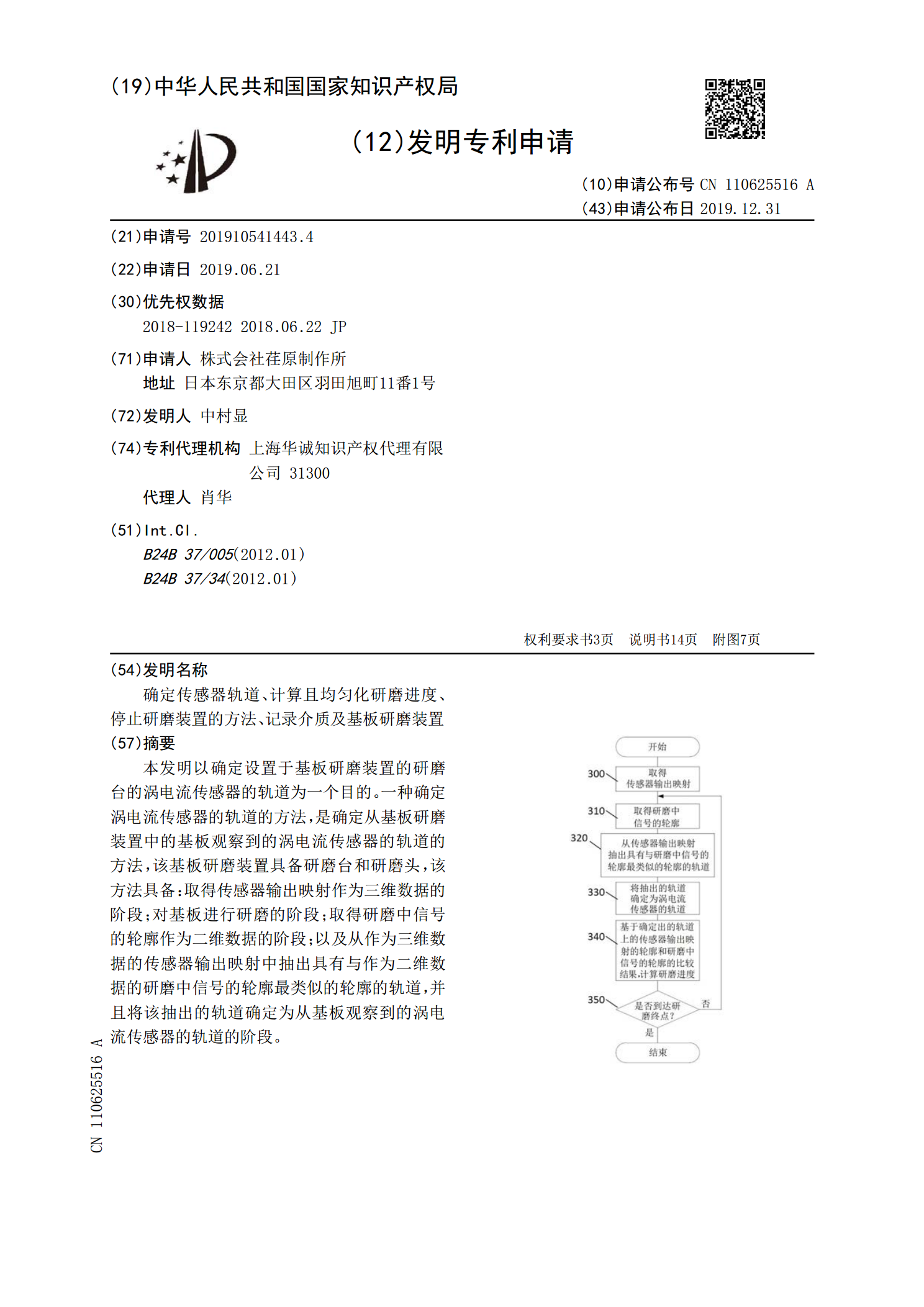
本发明以确定设置于基板研磨装置的研磨台的涡电流传感器的轨道为一个目的。一种确定涡电流传感器的轨道的方法,是确定从基板研磨装置中的基板观察到的涡电流传感器的轨道的方法,该基板研磨装置具备研磨台和研磨头,该方法具备:取得传感器输出映射作为三维数据的阶段;对基板进行研磨的阶段;取得研磨中信号的轮廓作为二维数据的阶段;以及从作为三维数据的传感器输出映射中抽出具有与作为二维数据的研磨中信号的轮廓最类似的轮廓的轨道,并且将该抽出的轨道确定为从基板观察到的涡电流传感器的轨道的阶段。

基板研磨装置和基板研磨方法.pdf
本发明提供一种在测定研磨中的基板的膜厚时,能够不使光的透过率降低地以较高精度进行测定的基板研磨装置和基板研磨方法。基板研磨装置(1)具备载物台(10)、保持研磨垫(22)的研磨头(21)、研磨液供给喷嘴(28)、膜厚测定头(31)、光谱解析部(34)、安装有膜厚测定头(31)的测定头喷嘴(40),测定头喷嘴(40)具备形成横穿光和反射光的光路的液体的流动的第一流路系统(71)和第二流路系统(72),第一流路系统(71)具有位于光路上的开口部(154),第二流路系统(72)具有液体喷出口(254)和液体吸入

基板端面研磨装置及研磨判定方法.pdf
本发明的目的在于提供一种将研磨轮的磨损槽深度引入修正要素的、可靠性高并适应控制的基板端面研磨装置,以及基板端面的研磨是否良好的判定方法。基板端面研磨装置的特征在于包括:对基板端面进行研磨加工的研磨轮、该研磨轮的旋转驱动组件、以及所述研磨轮的切入送出组件;研磨轮的旋转驱动组件具有:利用基板端面接触的负载电流检测组件、以及通过在研磨轮产生的磨损槽的槽侧面接触于基板而产生的负载电流的修正组件。

研磨方法、研磨装置及记录有程序的计算机可读取记录介质.pdf
本发明关于研磨晶片等基板的研磨方法及研磨装置。此外,本发明关于记录有用于使研磨装置执行研磨方法的程序的计算机可读取记录介质。本方法使研磨台(3)旋转,并将基板(W)按压于研磨面(2a)来研磨基板(W)。研磨基板(W)的工序包含膜厚轮廓调整工序和研磨终点检测工序。膜厚轮廓调整工序包含如下工序:基于多个膜厚来调整基板(W)对研磨面(2a)的按压力,决定膜厚指标值达到膜厚阈值的时间点,该膜厚指标值是根据多个膜厚中的至少一个而决定的。研磨终点检测工序包含如下工序:测定用于使研磨台(3)旋转的转矩,并基于转矩决定研

玻璃基板的制造方法、研磨方法及研磨装置以及玻璃基板.pdf
本发明提供一种玻璃基板的制造方法、研磨方法及研磨装置以及玻璃基板,能够提高玻璃基板的研磨精度。该研磨装置具备:驱动上平台(40)的电动机、驱动下平台(30)的电动机、驱动设于下平台(30)的内周的内侧的太阳齿轮的电动机、驱动设于下平台(30)的外周的外侧的内啮合齿轮的电动机、以及控制这些电动机的控制部(90),控制部(90)通过控制这些电动机的驱动而对玻璃基板进行研磨,其特征在于,控制部(90)基于这些电动机的驱动所需的电力或者电力量调整玻璃基板的研磨。