
一种正时齿形链系统的设计方法.pdf

山柳****魔王

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种正时齿形链系统的设计方法.pdf
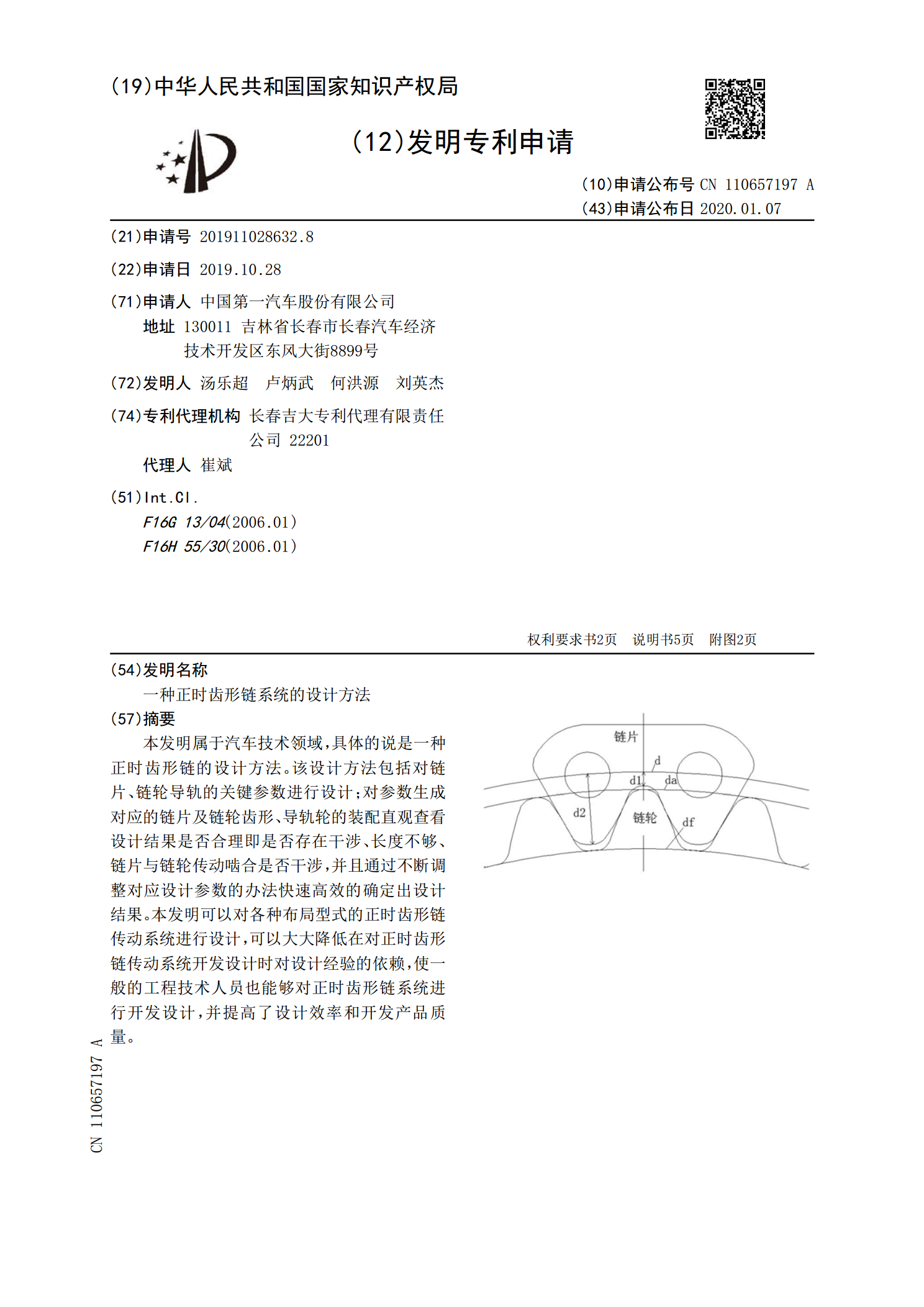
本发明属于汽车技术领域,具体的说是一种正时齿形链的设计方法。该设计方法包括对链片、链轮导轨的关键参数进行设计;对参数生成对应的链片及链轮齿形、导轨轮的装配直观查看设计结果是否合理即是否存在干涉、长度不够、链片与链轮传动啮合是否干涉,并且通过不断调整对应设计参数的办法快速高效的确定出设计结果。本发明可以对各种布局型式的正时齿形链传动系统进行设计,可以大大降低在对正时齿形链传动系统开发设计时对设计经验的依赖,使一般的工程技术人员也能够对正时齿形链系统进行开发设计,并提高了设计效率和开发产品质量。
一种发动机正时链轮与正时链条齿形匹配设计方法.pdf
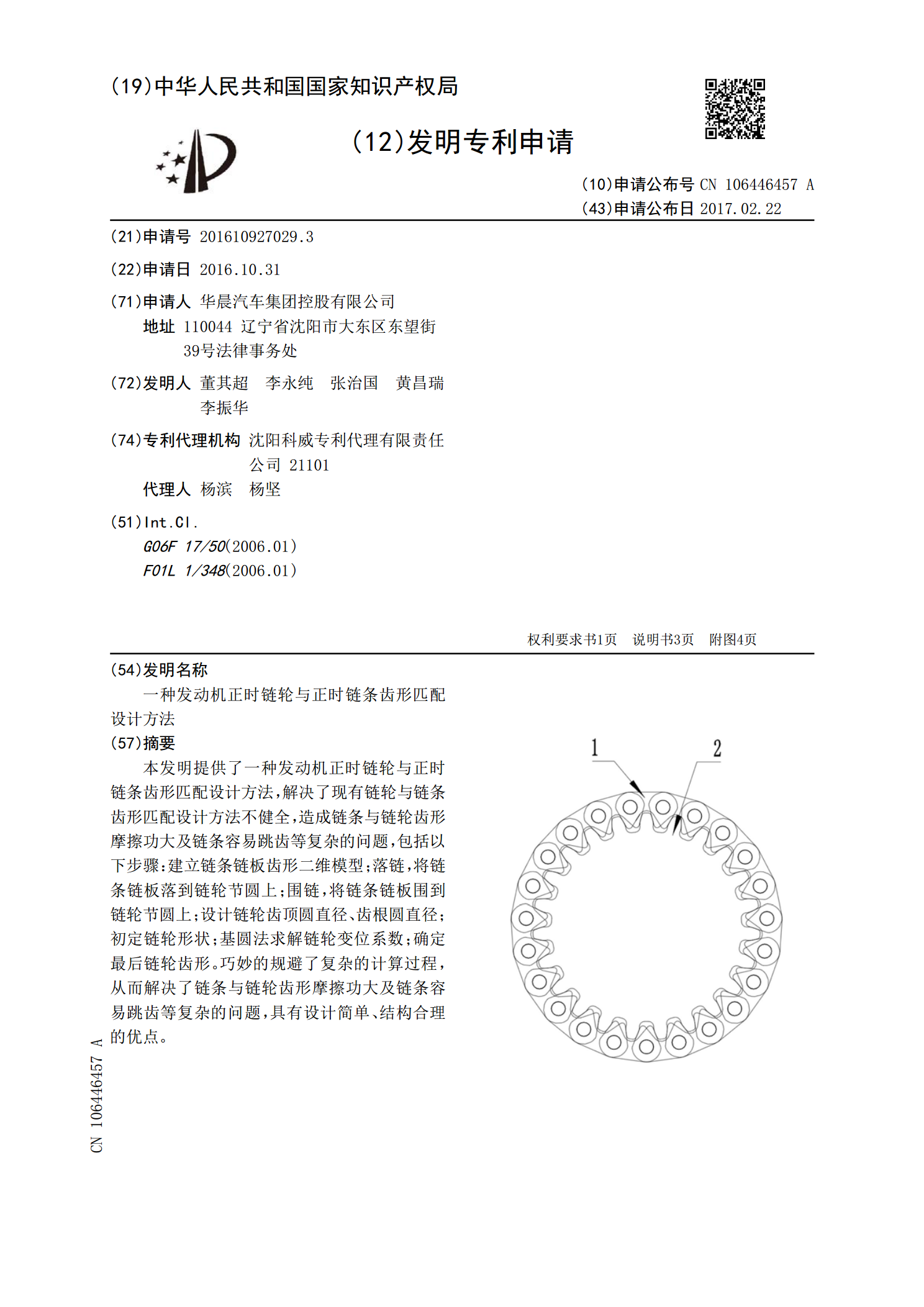
本发明提供了一种发动机正时链轮与正时链条齿形匹配设计方法,解决了现有链轮与链条齿形匹配设计方法不健全,造成链条与链轮齿形摩擦功大及链条容易跳齿等复杂的问题,包括以下步骤:建立链条链板齿形二维模型;落链,将链条链板落到链轮节圆上;围链,将链条链板围到链轮节圆上;设计链轮齿顶圆直径、齿根圆直径;初定链轮形状;基圆法求解链轮变位系数;确定最后链轮齿形。巧妙的规避了复杂的计算过程,从而解决了链条与链轮齿形摩擦功大及链条容易跳齿等复杂的问题,具有设计简单、结构合理的优点。
一种正时链系统.pdf
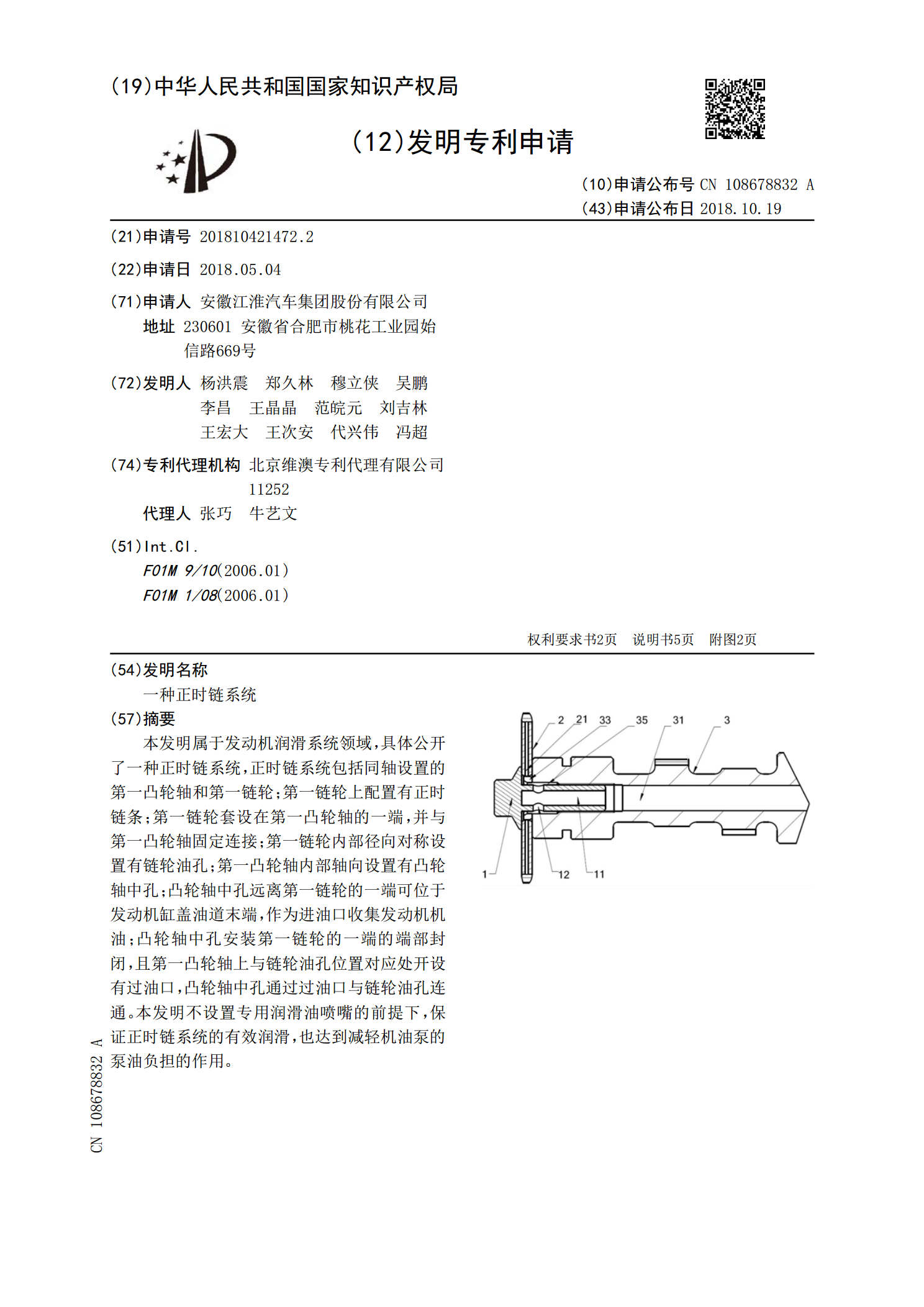
本发明属于发动机润滑系统领域,具体公开了一种正时链系统,正时链系统包括同轴设置的第一凸轮轴和第一链轮;第一链轮上配置有正时链条;第一链轮套设在第一凸轮轴的一端,并与第一凸轮轴固定连接;第一链轮内部径向对称设置有链轮油孔;第一凸轮轴内部轴向设置有凸轮轴中孔;凸轮轴中孔远离第一链轮的一端可位于发动机缸盖油道末端,作为进油口收集发动机机油;凸轮轴中孔安装第一链轮的一端的端部封闭,且第一凸轮轴上与链轮油孔位置对应处开设有过油口,凸轮轴中孔通过过油口与链轮油孔连通。本发明不设置专用润滑油喷嘴的前提下,保证正时链系统
一种橡胶金属齿形链系统.pdf
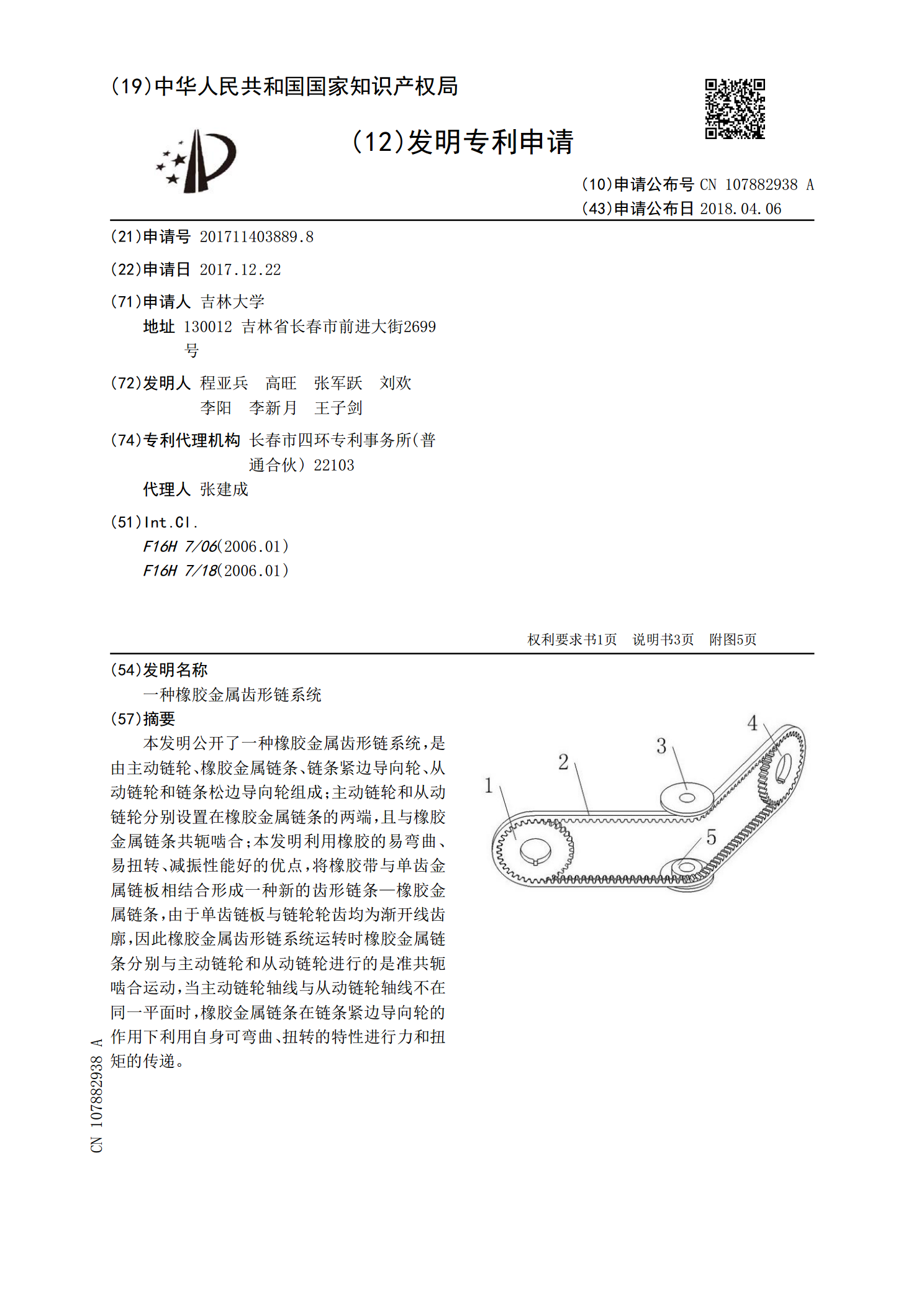
本发明公开了一种橡胶金属齿形链系统,是由主动链轮、橡胶金属链条、链条紧边导向轮、从动链轮和链条松边导向轮组成;主动链轮和从动链轮分别设置在橡胶金属链条的两端,且与橡胶金属链条共轭啮合;本发明利用橡胶的易弯曲、易扭转、减振性能好的优点,将橡胶带与单齿金属链板相结合形成一种新的齿形链条—橡胶金属链条,由于单齿链板与链轮轮齿均为渐开线齿廓,因此橡胶金属齿形链系统运转时橡胶金属链条分别与主动链轮和从动链轮进行的是准共轭啮合运动,当主动链轮轴线与从动链轮轴线不在同一平面时,橡胶金属链条在链条紧边导向轮的作用下利用自

非标齿形链加工方法及非标齿形链.pdf
本发明公开了非标齿形链加工方法,该方法是先采用级进模同时对多个链板进行精密冲裁,使链板孔和链板侧边均达到100%光亮;再对链板进行等温淬火处理,对导板进行碳氮共渗处理;然后对销轴进行碳氮共渗和等温淬火的复合热处理,并进行深冷处理、磨削和抛光;最后进行装配链板、导板和销轴,并在装配完成后进行预拉跑合。本发明不仅能够提高啮合精度,降低噪音,还具有强度高、抗疲劳性能好和耐磨性能好的优点。