
气垫式起落系统缓冲主动控制装置及其控制方法.pdf

努力****承悦


1/7
2/7

3/7

4/7

5/7

6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

气垫式起落系统缓冲主动控制装置及其控制方法.pdf
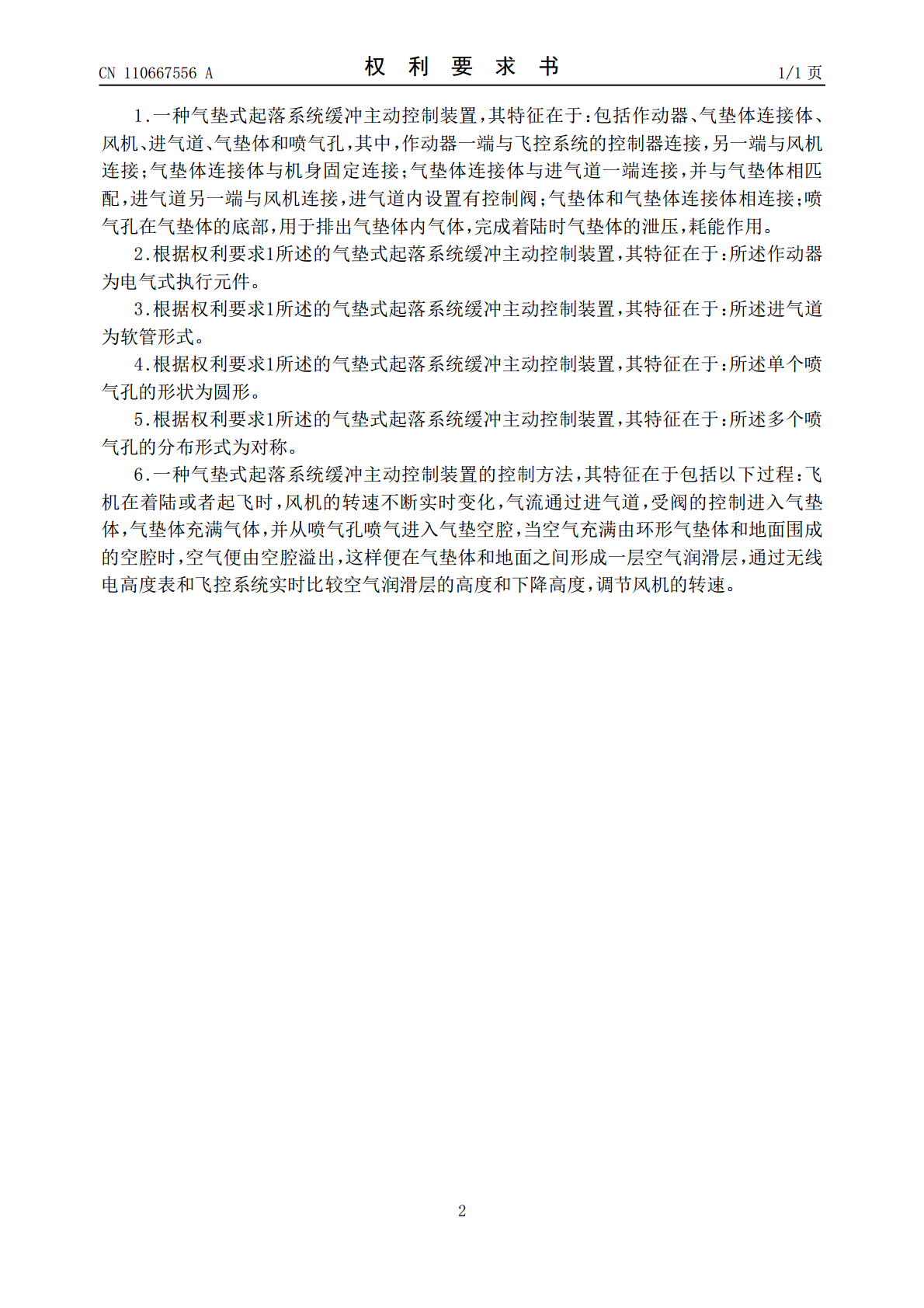
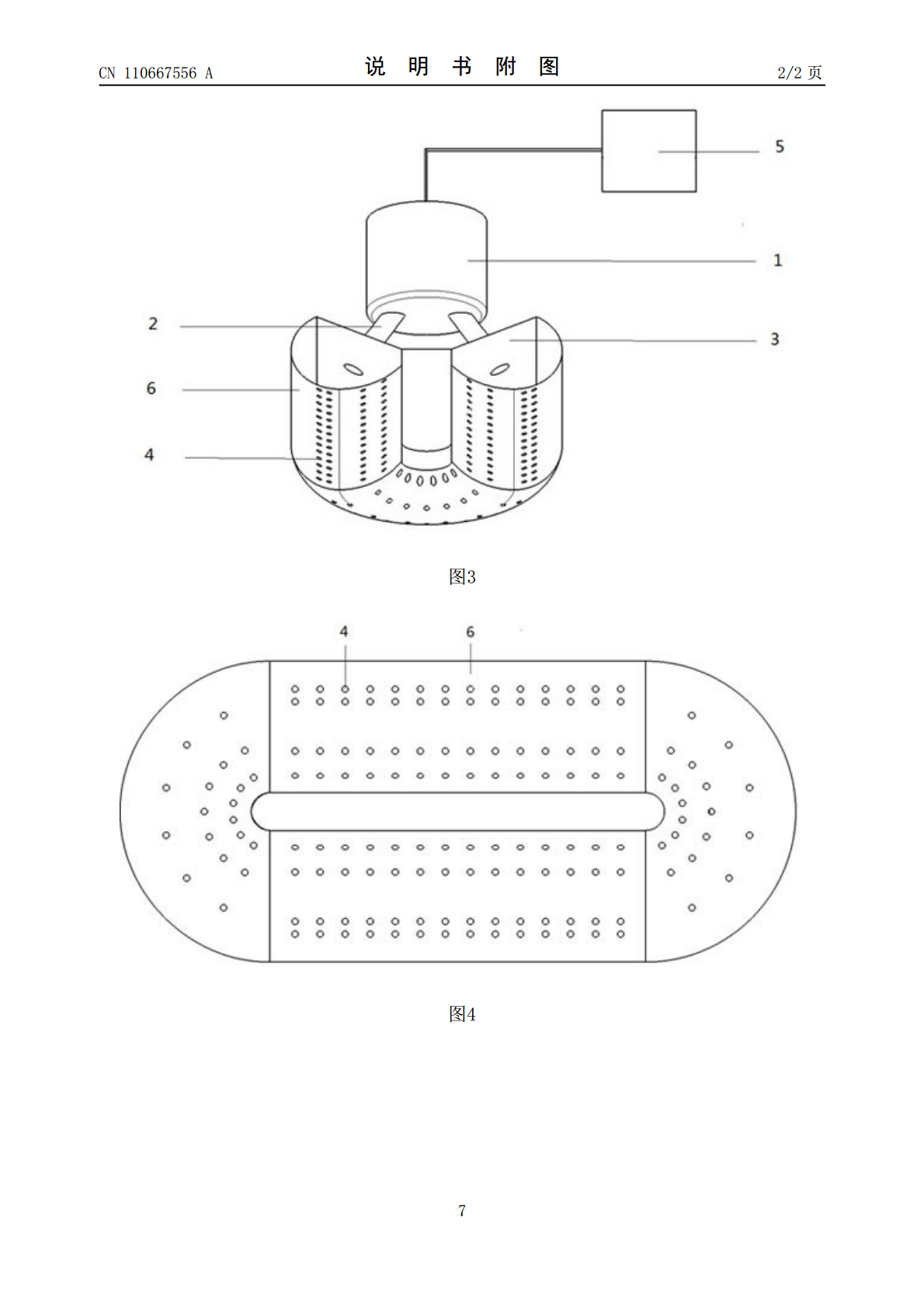
本发明提供了一种气垫式起落系统缓冲主动控制装置及其控制方法,该装置包括作动器、气垫体连接体、风机、进气道、气垫体和喷气孔,其中,作动器一端与飞控系统的控制器连接,另一端与风机连接;气垫体连接体与机身固定连接;气垫体连接体与进气道一端连接,并与气垫体相匹配,进气道另一端与风机连接,进气道内设置有控制阀;气垫体和气垫体连接体相连接;喷气孔在气垫体的底部,用于排出气垫体内气体,完成着陆时气垫体的泄压,耗能作用。本发明用气垫式起落系统代替传统轮式起落架,减小了飞机总体质量,降低了对起降场地的要求,大大拓展了固定翼

气垫式起落系统操纵装置及方法.pdf
本发明提供了一种气垫式起落系统操纵装置及方法,操纵装置包括增压室和气垫体,其中增压室上壁与机身固定连接,气垫体半包围增压室的侧壁和底部;所述的增压室的上壁连接有风机,增压室下壁开有增压室排气孔;所述的气垫体底部开有喷气孔,气垫体侧壁开有贯穿增压室的增压室航向流量排气孔,增压室航向流量排气孔内设置有航向流量通气管,航向流量通气管内设置有增压室航向流量控制阀。用气垫式起落系统代替传统轮式起落架,减小了飞机总体质量,降低了对起降场地的要求,大大拓展了固定翼飞机的起降环境,并且解决了传统气垫式起落系统操纵性能差的

一种双阻尼系统的主动冲击缓冲装置及其缓冲控制方法.pdf
本发明公开了一种双阻尼系统的主动冲击缓冲装置及其缓冲控制方法,该装置包括:双阻尼系统、上端支撑架、下端安装架、压缩弹簧、电磁铁和永磁体;双阻尼系统是由两个磁流变阻尼器、齿轮齿条机构组成;该缓冲控制方法包括判断是否遇到冲击以及在遇到冲击之后控制上端支撑架与下端安装架的分离控制。本发明能保证装置遇冲击时的有效减振,保护被减振装置。
主动式儿童安全气囊装置及其控制方法.pdf
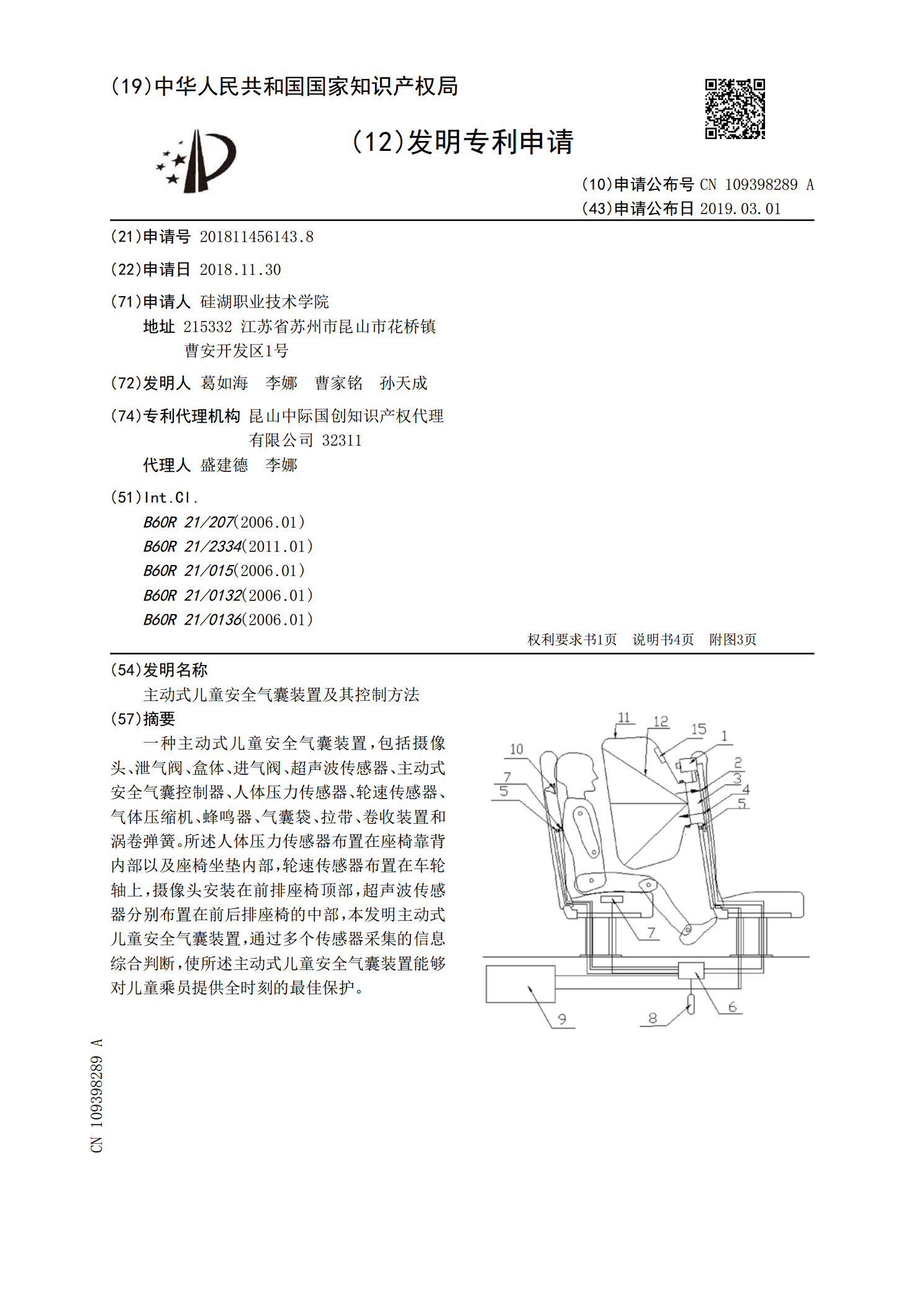
一种主动式儿童安全气囊装置,包括摄像头、泄气阀、盒体、进气阀、超声波传感器、主动式安全气囊控制器、人体压力传感器、轮速传感器、气体压缩机、蜂鸣器、气囊袋、拉带、卷收装置和涡卷弹簧。所述人体压力传感器布置在座椅靠背内部以及座椅坐垫内部,轮速传感器布置在车轮轴上,摄像头安装在前排座椅顶部,超声波传感器分别布置在前后排座椅的中部,本发明主动式儿童安全气囊装置,通过多个传感器采集的信息综合判断,使所述主动式儿童安全气囊装置能够对儿童乘员提供全时刻的最佳保护。

起落架半主动减摆器及其控制方法.pdf
本发明的起落架半主动减摆器及其控制方法,属于飞机起落架减摆器领域。包括缸体、活塞、活塞杆、控制器、传感器和高速开关阀,缸体与起落架缓冲器外筒连接,活塞杆与起落架机轮扭力臂连接,活塞将缸体分为左腔和右腔,高速开关阀由控制器驱动,通过管路和缸体的左腔和右腔相连接,其控制方法是:控制器接收传感器反馈的机轮的信息,判断起落架前轮系统处于何种工况,确定高速开关阀的控制信号初值,再通过控制器中的自适应模糊控制器模块接收高速开关阀的初值,综合传感器提供的信息给出高速开关阀的控制信号。本发明提供一种考虑油液温度