
一种介入血管微手术机器人.pdf

萌运****魔王

1/10

2/10

3/10

4/10

5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种介入血管微手术机器人.pdf
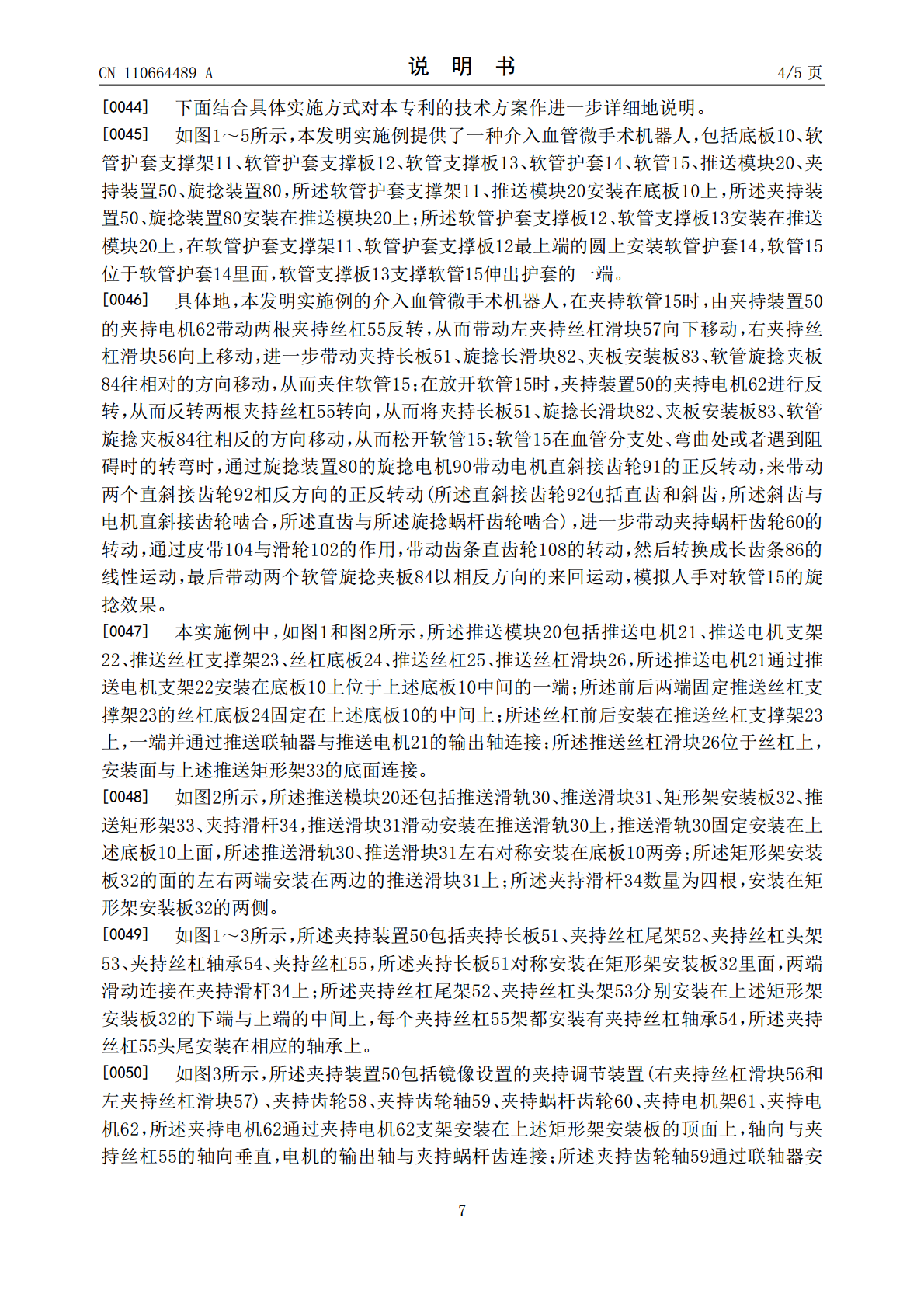
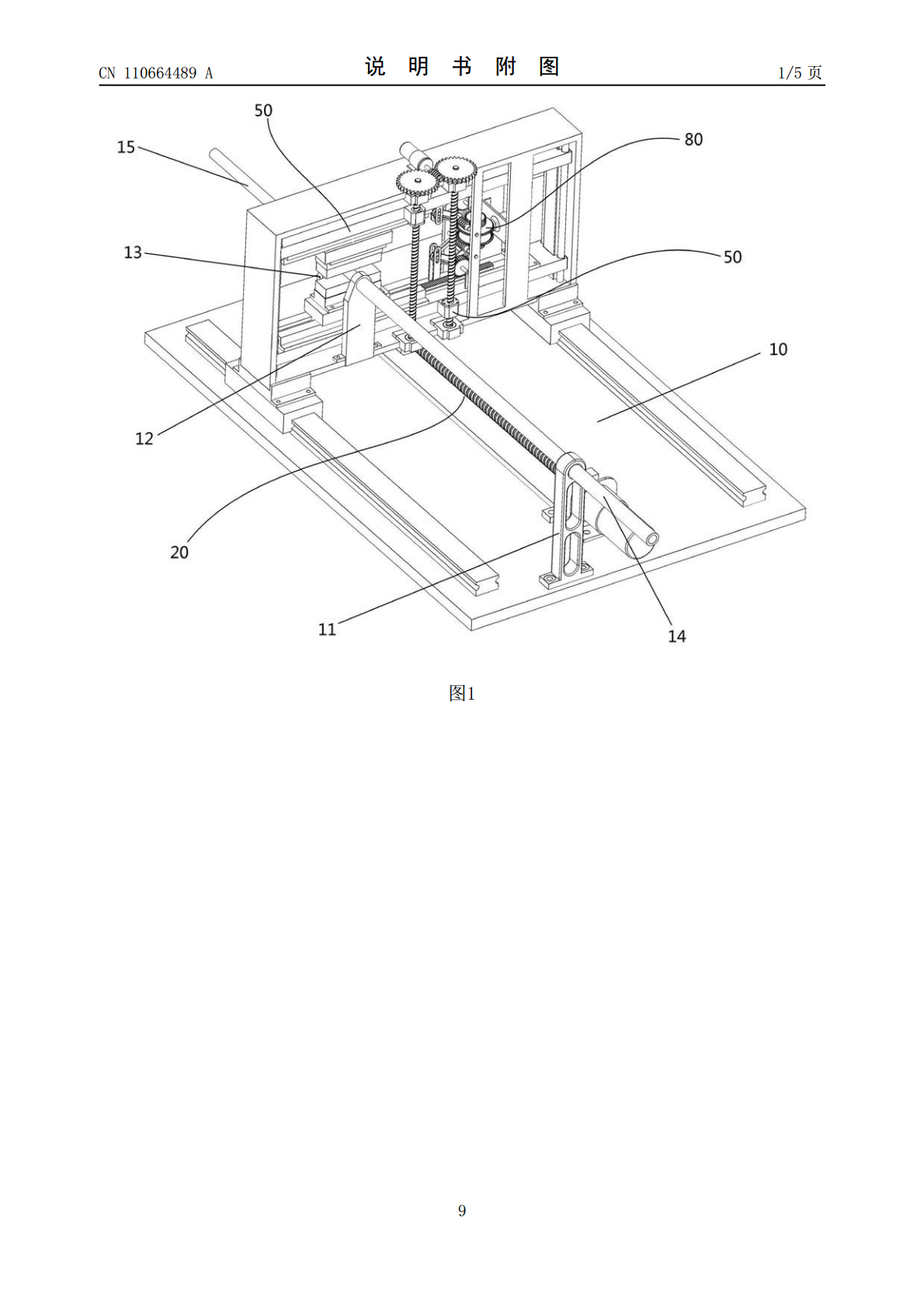
一种介入血管微手术机器人,包括软管、软管支撑组件以及旋捻装置,所述软管与所述软管支撑组件滑动连接,其特征在于,所述旋捻装置包括镜像设置的第一旋捻组件和第二旋捻组件,所述第一旋捻组件和第二旋捻组件分别包括:旋捻导轨、软管旋捻夹板、长齿条和啮合件,所述软管旋捻夹板滑动安装在所述旋捻导轨上,所述长齿条的一端与所述软管旋捻夹板固定,所述啮合件与所述长齿条啮合,另一端沿着所述旋捻导轨的轨道延伸出来与所述啮合件啮合,所述啮合件连接设有旋捻电机。采用双向对称平衡丝杠夹紧的方式,并且用齿轮齿条的方式对夹块双向的反向的连续
一种微创血管介入手术机器人操作装置.pdf
本发明属于医疗康复设备领域,具体涉及一种微创血管介入手术机器人操作装置。本发明包括底座、力觉控制机构和位置控制机构。力觉控制机构包括第一支座、电机、扭矩传感器、第一带轮、第一位置编码器、直线导轨、操作杆支座、操作杆、第二位置编码器、轻触开关、第二支座、第二带轮和第一皮带;位置控制机构包括第一支撑架、转动杆、操作手轮组件、第二皮带、第三带轮、第二支撑架、第四带轮、第三位置编码器、第三皮带、磁粉制动器、第五带轮和第四位置编码器。本发明可依据手术过程中医生操作需求,模拟医生手术过程中对微导管/导丝的操作动作,并

一种微创血管介入手术机器人执行装置.pdf
本发明提供一种微创血管介入手术机器人执行装置,用于对介入手术所用的导管/导丝进行捻旋推进,包括:底座;夹持部,安装于底座上,包括安装座、夹持电机、凸轮、小滑轨、压合块、压合弹簧以及固定块,当凸轮转动时推动压合块沿小滑轨移动,使压合块远离固定块,进而使得压合弹簧推动压合块沿小滑轨向固定块运动并将导管/导丝压紧;递送部,安装于底座上,包括递送电机、第一同步带轮、第二同步带轮以及直线滑轨;以及捻旋部,滑动连接于递送部上,包括滑动座、捻旋组件、夹紧组件。本发明具备递送、捻旋、夹持功能,可在手术中对导丝/导管进行持

血管介入手术机器人.pdf
Proceedingsofthe2011IEEEInternationalConferenceonMechatronicsandAutomationAugust7-10,Beijing,ChinaDesignofaNovelMaster-SlaveRoboticSystemforMinimallyIntravascularInvasiveSurgeryPengZhang1,2*,ShichaoYu1,3,YingHu1,2,XinMa1,2,JianweiZhang41ShenzhenInstitutes
一种血管介入手术机器人和设备.pdf
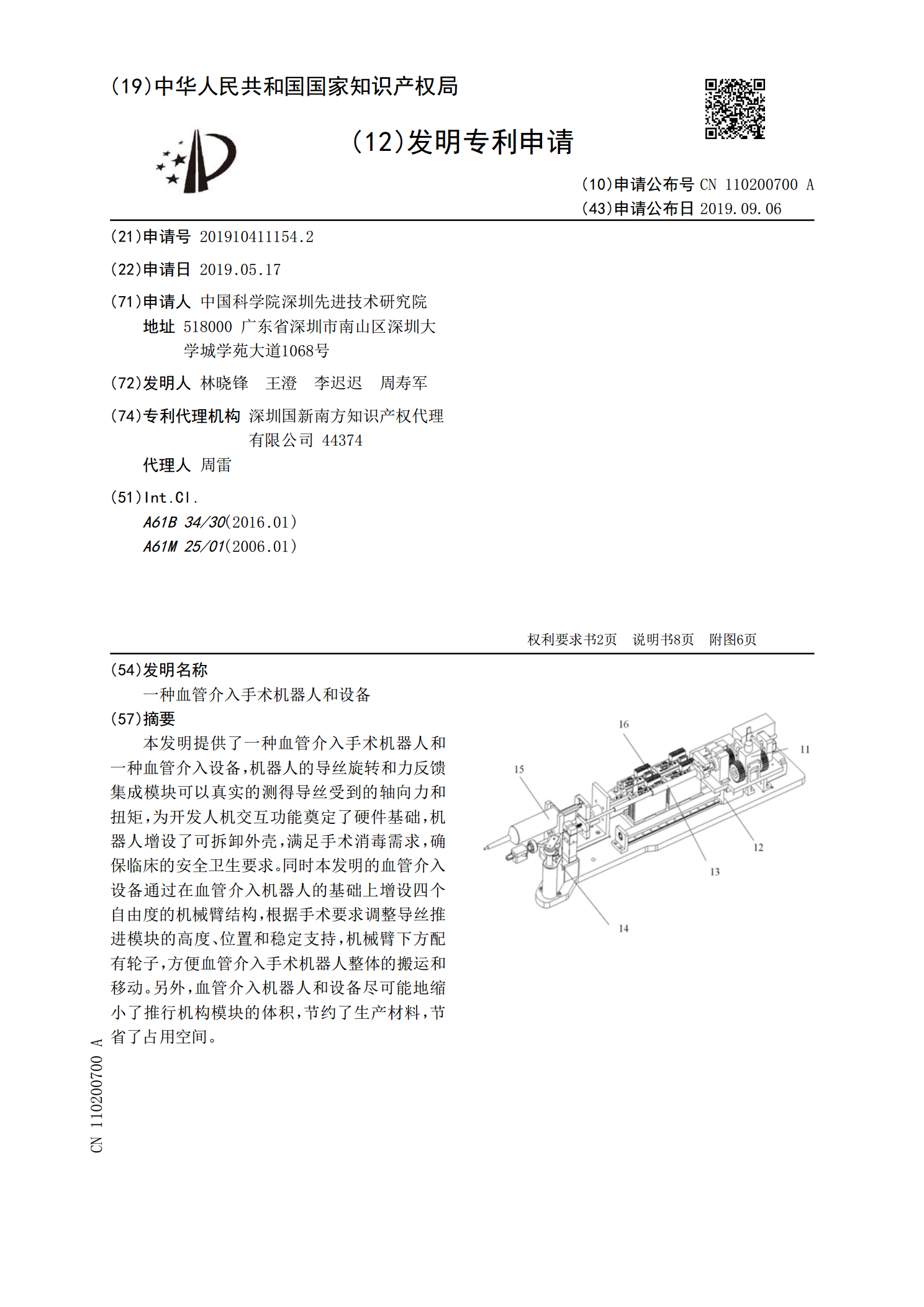
本发明提供了一种血管介入手术机器人和一种血管介入设备,机器人的导丝旋转和力反馈集成模块可以真实的测得导丝受到的轴向力和扭矩,为开发人机交互功能奠定了硬件基础,机器人增设了可拆卸外壳,满足手术消毒需求,确保临床的安全卫生要求。同时本发明的血管介入设备通过在血管介入机器人的基础上增设四个自由度的机械臂结构,根据手术要求调整导丝推进模块的高度、位置和稳定支持,机械臂下方配有轮子,方便血管介入手术机器人整体的搬运和移动。另外,血管介入机器人和设备尽可能地缩小了推行机构模块的体积,节约了生产材料,节省了占用空间。