
用于控制差动制动装置的方法.pdf

猫巷****提格

1/10
2/10

3/10

4/10

5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于控制差动制动装置的方法.pdf
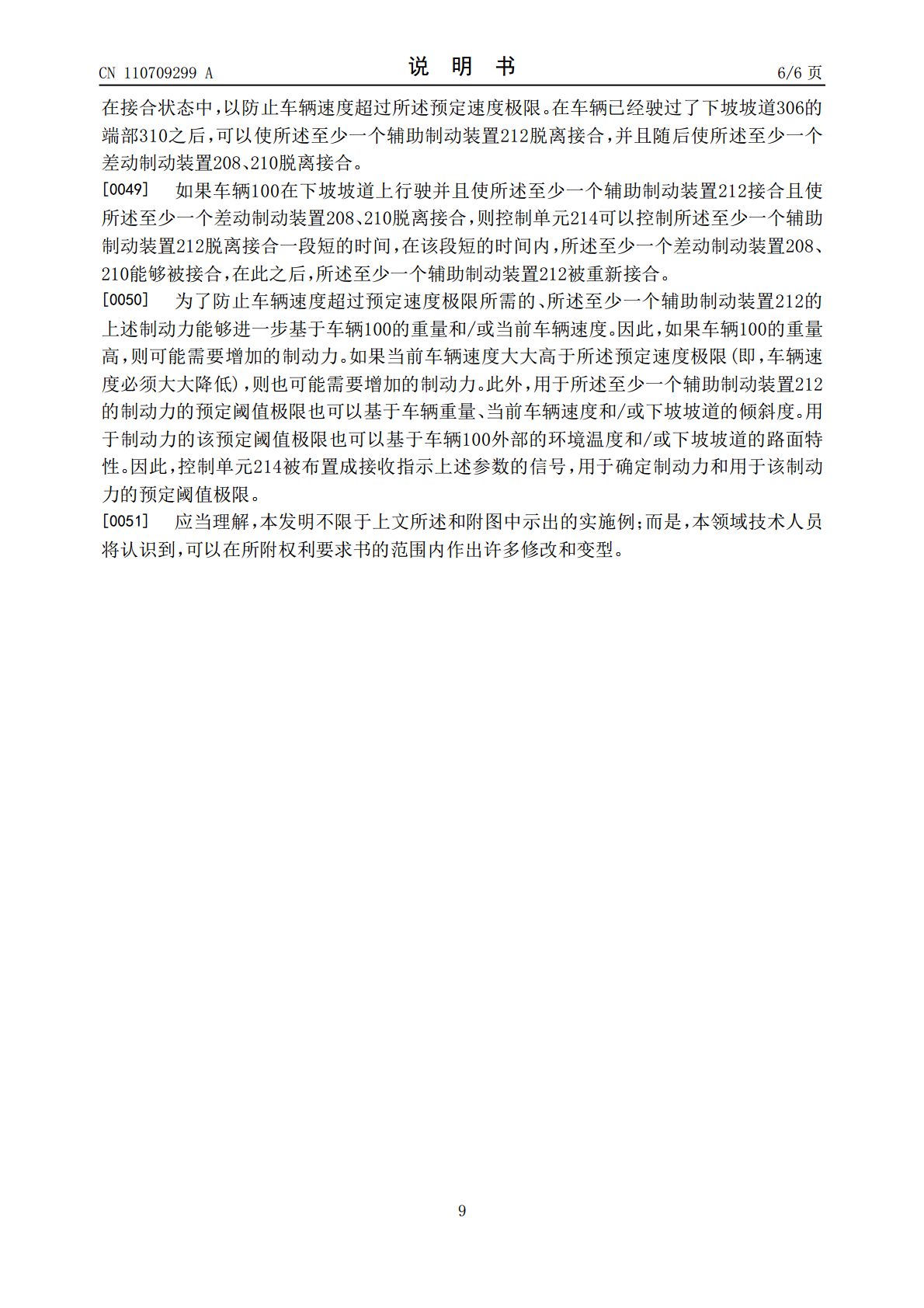
本发明涉及一种用于控制车辆(100)的差动制动装置(208、210)的方法,所述车辆(100)包括至少一个辅助制动装置(212)和至少一个差动制动装置(208、210),所述辅助制动装置(212)和所述差动制动装置(208、210)连接到所述车辆(100)的一对驱动轮(104、104'、106、106'),其中,所述差动制动装置(208、210)被布置成控制所述一对驱动轮(104、04'、106、106')之间的相对旋转速度,其中该方法包括以下步骤:接收(S1)指示所述车辆(100)前方的道路的下坡坡道(

用于车辆的制动控制装置和用于车辆的制动控制方法.pdf
一种用于车辆的制动控制装置,包括第一减速度计算单元、第二减速度计算单元、辅助控制单元和终止判定单元。第一减速度计算单元利用来自轮速传感器的检测信号计算第一估算车体减速度。第二减速度计算单元利用车体加速度传感器的检测信号计算第二估算车体减速度。如果第一估算车体减速度超过第一减速度判定值并且第二估算车体减速度超过第二减速度判定值,则辅助控制单元启动用于支持增大制动力的辅助控制。终止判定单元基于第一估算车体减速度和/或第二估算车体减速度判定是否已经满足辅助控制的终止条件。如果终止判定单元判定已经满足终止条件,则
用于车辆的制动装置和制动控制方法.pdf
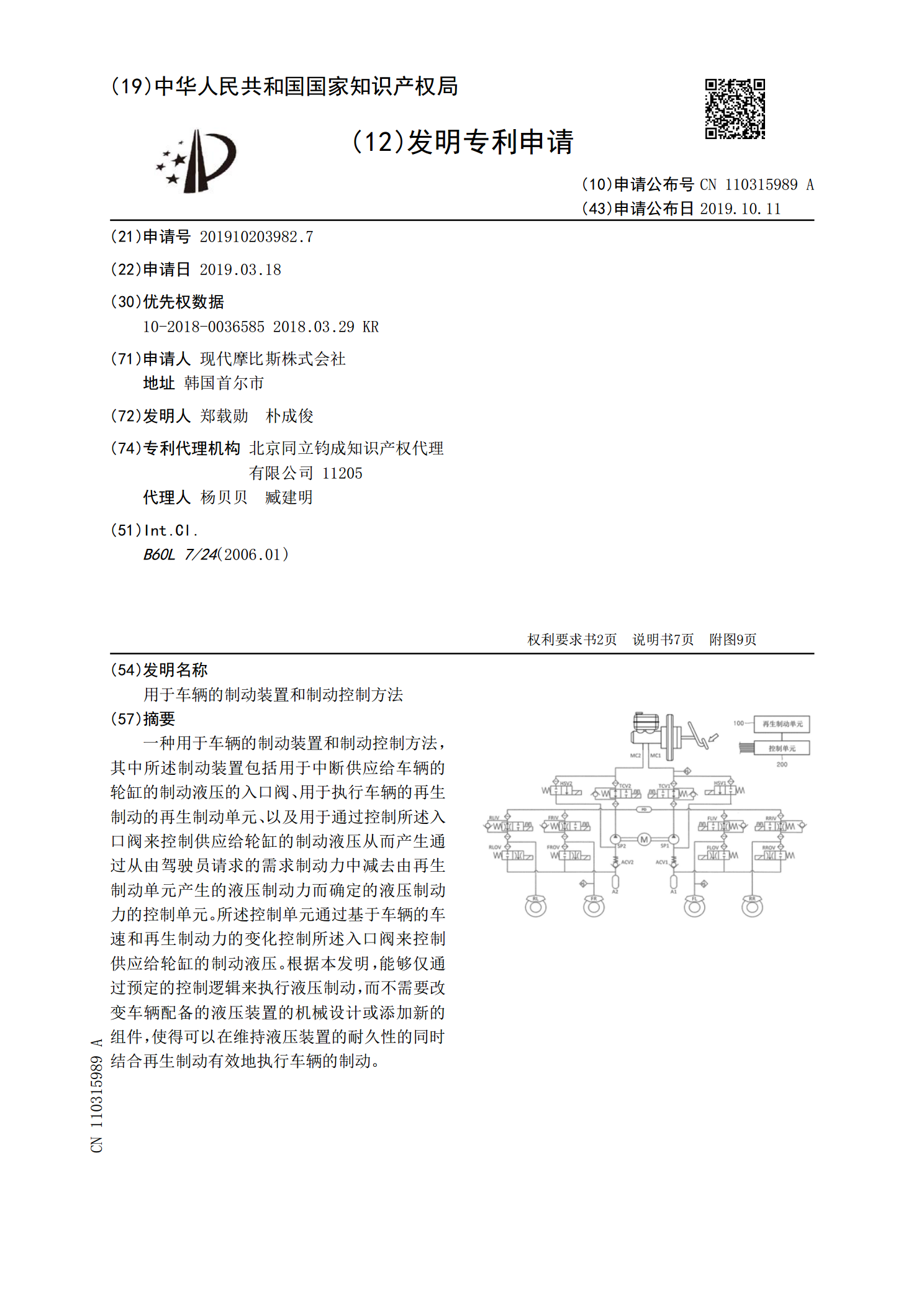
一种用于车辆的制动装置和制动控制方法,其中所述制动装置包括用于中断供应给车辆的轮缸的制动液压的入口阀、用于执行车辆的再生制动的再生制动单元、以及用于通过控制所述入口阀来控制供应给轮缸的制动液压从而产生通过从由驾驶员请求的需求制动力中减去由再生制动单元产生的液压制动力而确定的液压制动力的控制单元。所述控制单元通过基于车辆的车速和再生制动力的变化控制所述入口阀来控制供应给轮缸的制动液压。根据本发明,能够仅通过预定的控制逻辑来执行液压制动,而不需要改变车辆配备的液压装置的机械设计或添加新的组件,使得可以在维持液
用于控制马达制动装置的方法以及马达制动装置.pdf
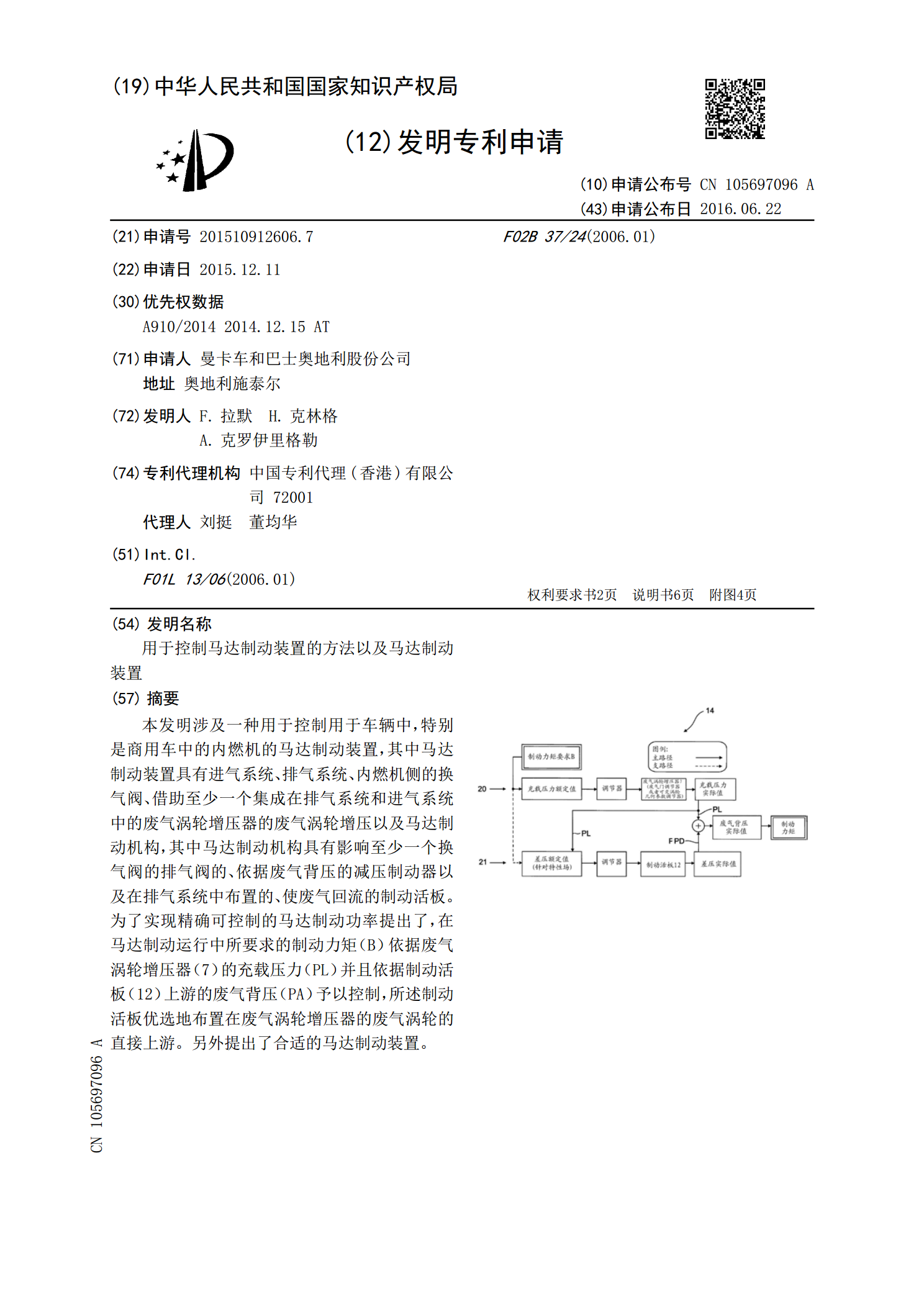
本发明涉及一种用于控制用于车辆中,特别是商用车中的内燃机的马达制动装置,其中马达制动装置具有进气系统、排气系统、内燃机侧的换气阀、借助至少一个集成在排气系统和进气系统中的废气涡轮增压器的废气涡轮增压以及马达制动机构,其中马达制动机构具有影响至少一个换气阀的排气阀的、依据废气背压的减压制动器以及在排气系统中布置的、使废气回流的制动活板。为了实现精确可控制的马达制动功率提出了,在马达制动运行中所要求的制动力矩(B)依据废气涡轮增压器(7)的充载压力(PL)并且依据制动活板(12)上游的废气背压(PA)予以控制

用于制动控制的方法和装置.pdf
本发明涉及用于制动控制的方法和装置,所述方法包括:当对车辆执行分路制动时,判断是否比正常轮胎小的小型备胎安装在所述车辆的后轴上并且位于所述车辆正在其上行驶的道路的较高附着系数侧部分上;如果所述判断的结果为肯定,则基于针对所述小型备胎而设置的分路制动的参数的值,生成应用到所述车辆的前轴的左侧车轮和右侧车轮的制动压力;将所生成的制动压力输出给用于所述左侧车轮和所述右侧车轮的制动设备。利用所述方法和装置,能够实现其后轴安装了小型备胎的车辆的平稳制动。