
一种管道机器人的行走装置.pdf

茂学****23


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种管道机器人的行走装置.pdf
本发明公开了一种管道机器人的行走装置,包括:前支撑结构、驱动结构、后支撑结构、滚轮结构、万向节和控制系统;所述前支撑结构与万向节连接,所述万向节与滚轮结构连接,所述滚轮结构与驱动结构连接;所述后支撑结构与前支撑结构相同,依次与万向节和滚轮结构连接后与驱动结构连接,所述前支撑结构、驱动结构和后支撑结构通过信号传输单元与控制系统连接;本发明支撑结构、驱动结构和后支撑结构均采用电机驱动丝杠螺母机构来实现机器人在管内的行走和支撑,其具有足够大的驱动牵引力、管径适应性和行走能力,在管道的两端设置不同清洁部件,能够满
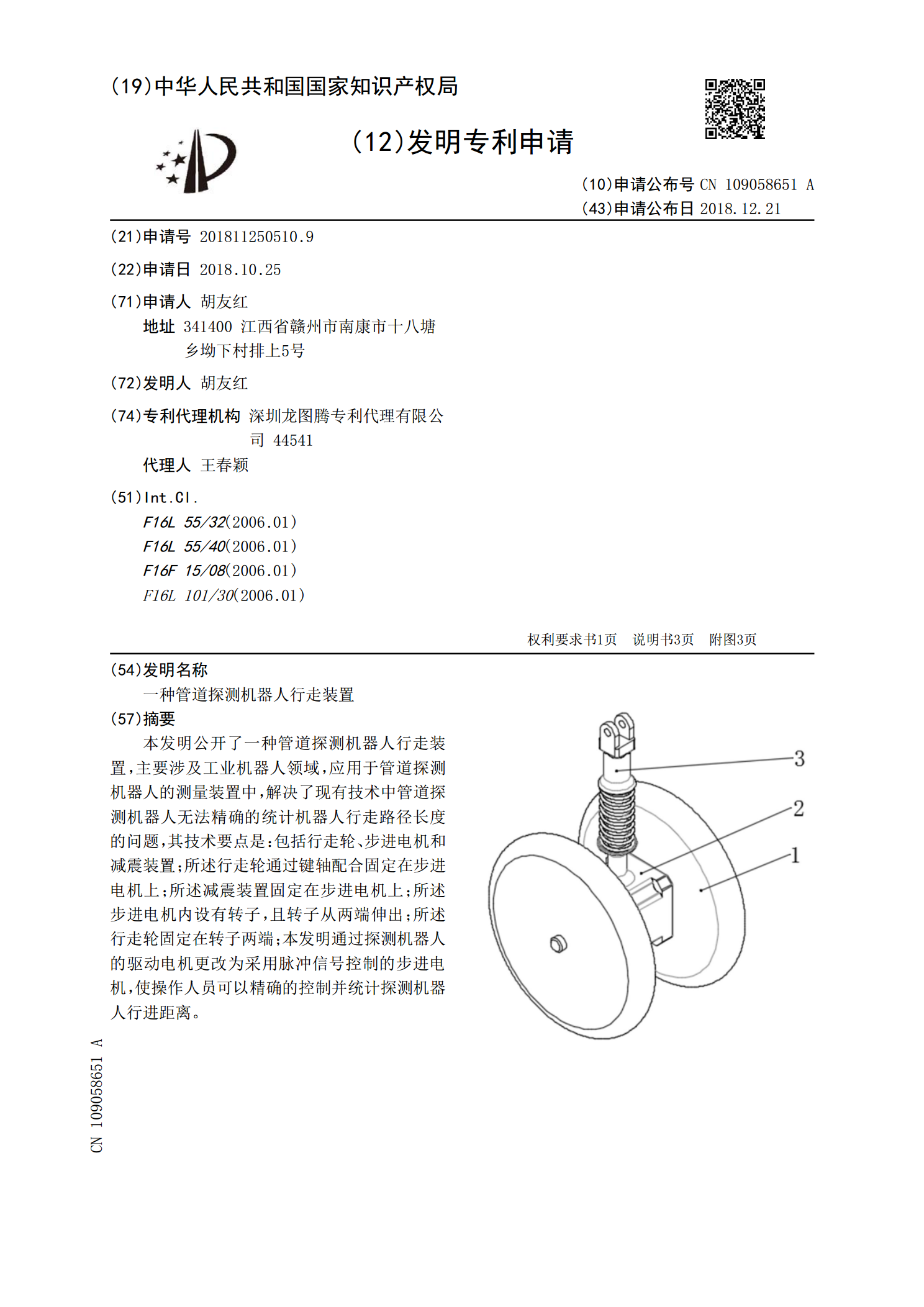
一种管道探测机器人行走装置.pdf
本发明公开了一种管道探测机器人行走装置,主要涉及工业机器人领域,应用于管道探测机器人的测量装置中,解决了现有技术中管道探测机器人无法精确的统计机器人行走路径长度的问题,其技术要点是:包括行走轮、步进电机和减震装置;所述行走轮通过键轴配合固定在步进电机上;所述减震装置固定在步进电机上;所述步进电机内设有转子,且转子从两端伸出;所述行走轮固定在转子两端;本发明通过探测机器人的驱动电机更改为采用脉冲信号控制的步进电机,使操作人员可以精确的控制并统计探测机器人行进距离。

一种管道机器人行走、过障辅助装置及管道机器人.pdf
本发明公开了一种管道机器人行走、过障辅助装置及管道机器人,其中管道机器人行走、过障辅助装置包括:用于与管道机器人本体相连的安装底座;设置于安装底座上的第一弹性机构和第二弹性机构,第一弹性机构和第二弹性机构能够提供弹性力;设置于第一弹性机构和第二弹性机构之间且与管道的内壁贴合的转动轮系机构,转动轮系机构能够在弹性力作用下顶紧管道的内壁。当管道机器人本体通过障碍路段时,管道机器人本体在第一弹性机构和第二弹性机构的弹性力作用下,管道机器人辅助装置的转动轮系机构顶紧管道的内壁,在该状态下行走可以提高管道机器人本体

用于管道内爬行机器人的行走装置.pdf
本发明公开了用于管道内爬行机器人的行走装置,包括固定壳、液压装置和伸缩器,其所述固定壳矩形空腔体,且固定壳内部设置有液压装置,所述液压装置由液压撑杆、液压动力单元、液压伸缩杆和连接器,所述液压撑杆设置于固定壳内腔前后两端,且两支液压撑杆通过连接器相连接,所述连接器为液压连接管,且连接器右部设置有液压动力单元;所述液压撑杆通过连接杆与液压伸缩杆相连接,且液压伸缩杆下部设置有伸缩器,所述伸缩器通过伸缩杆与驱动电机相连接,且驱动电机驱动轴上设置有车轮。本发明用于解决机器人在管道内遇到障碍物时难以通过的问题,同时
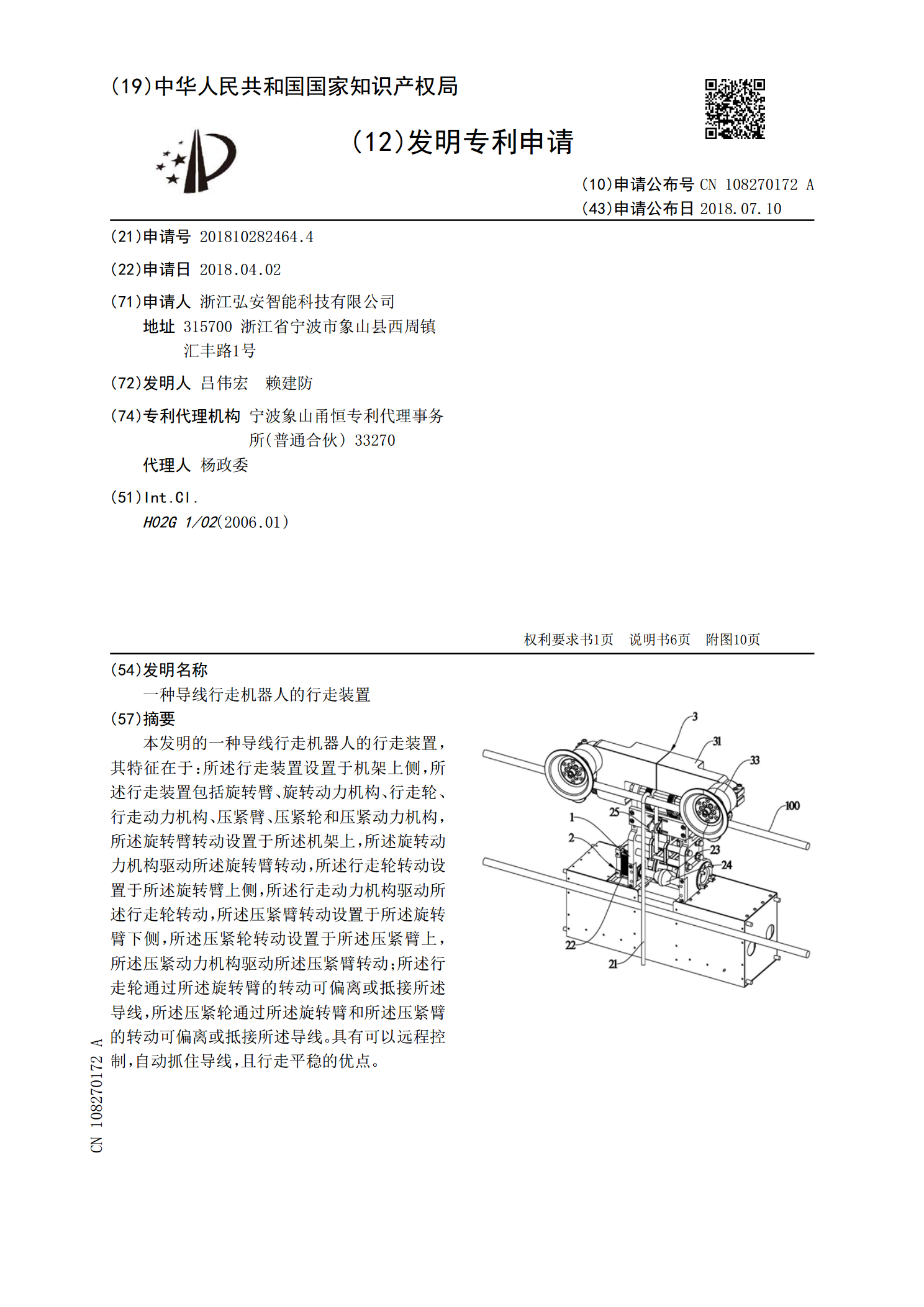
一种导线行走机器人的行走装置.pdf
本发明的一种导线行走机器人的行走装置,其特征在于:所述行走装置设置于机架上侧,所述行走装置包括旋转臂、旋转动力机构、行走轮、行走动力机构、压紧臂、压紧轮和压紧动力机构,所述旋转臂转动设置于所述机架上,所述旋转动力机构驱动所述旋转臂转动,所述行走轮转动设置于所述旋转臂上侧,所述行走动力机构驱动所述行走轮转动,所述压紧臂转动设置于所述旋转臂下侧,所述压紧轮转动设置于所述压紧臂上,所述压紧动力机构驱动所述压紧臂转动;所述行走轮通过所述旋转臂的转动可偏离或抵接所述导线,所述压紧轮通过所述旋转臂和所述压紧臂的转动可